КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Передаточные функции
Для описания САУ используются две различные передаточные функции - в операторной форме и в изображении Лапласа.
Передаточная функция в операторной форме W(p) называется отношением оператора воздействия к собственному оператору.
 ;
; 
Периодической функцией в изображениях Лапласа W(s) называется отношение изображений Лапласа выходной величины к входной при нулевых начальных условиях. Здесь s - переменная преобразования Лапласа.
Согласно определению, передаточная функция в операторной форме:
 (6.11.)
(6.11.)
Используя W(p), получим уравнение
 , (6.12.)
, (6.12.)
которое является разновидностью символической записи уравнения (3.7).
Чтобы определить передаточную функцию в изображениях Лапласа, произведем преобразование Лапласа при нулевых начальных условиях
 ;
;  (6.13.)
(6.13.)
Т.к. преобразованием по Лапласу называется функция
 (6.14.)
(6.14.)
Поэтому с учетом (6.14)
 ,
,
где  .
.
Тогда по определению передаточная функция в изображениях Лапласа
 ; (6.15.)
; (6.15.)
Поэтому уравнение в изображениях Лапласа приобретает вид
 (6.16.)
(6.16.)
Операторная функция W(s) получается из передаточной функции операторной формы W(p) формальной подстановкой p= s;  .
.
Такая связь между двумя формами передаточных функций справедлива только для стационарных систем.
Передаточные функции для ошибки по воздействию.
При исследовании точности замкнутых автоматических систем управления, разработчиков интересует зависимость ошибкиe(t) от задающего воздействияg(t).
Эта зависимость определяется передаточной функцией для ошибки по задающему воздействию, которую обозначаем He(p). Если передаточная функция He(p) известна, то тогда:
E(p)= He(p) G(p) (6.17)
G(p) (6.17)
Чтобы найти эту передаточную функцию по заданной структурной схеме автоматической системы, целесообразно выразить ее через передаточную функцию замкнутой системы Wз(p) или через передаточную функцию разомкнутой системы Wp(p):
He(p)=
Wз(p)= (6.18)
(6.18)
He(p)=1-=
После того как передаточная функция Не(р) найдена, ошибка замкнутой автоматической системы управления для задающего воздействия g(t), может быть определена путем обратного преобразования Лапласа, т.е:
e(t)=L-1[E(p)]=L-1[He(p) G(p)]. (6.19)
G(p)]. (6.19)
Передаточная функция для ошибки по помехе.
Системы автоматического управления работают, как правило, в условиях помех. При этом задающее воздействие g(t) всегда приложено к входу системы, а помеха V(t) может быть приложена в произвольной точке системы, как показано на рисунке 6.3. Разомкнутый контур разделен на две части. W1(p)- не подвержена воздействию помех, а на входе второй W2(p) действует помеха V(t). При этом W(p)=W1(p) W2(p).
W2(p).
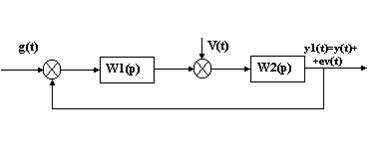
Рисунок 6‑3 Приложение воздействий на САУ
Выходная величина САУ может быть представлена в виде:
y1(t)=y(t)+ev(t), (6.20)
где y(t)=Wз(p)g(t) - реакция системы на задающее воздействие.
Ev(t)= (6.21)
(6.21)
Составляющая ev(t) выходной величины y1(t) искажает значение управляемой величины y(t), т.е. является ошибкой системы, обусловленной помехой V(t).
Отношение изображения Ev(p) этой ошибки к изображению помехи V(p) определяет передаточную функцию системы автоматического управления для ошибки по помехе:
Hev(p) = (6.22)
(6.22)
Если помеха действует на входе системы, то получаем:
Hev(p)=  =Wз (6.23)
=Wз (6.23)
|
Дата добавления: 2014-01-06; Просмотров: 757; Нарушение авторских прав?; Мы поможем в написании вашей работы!