КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Функциональная структура САР
|
|
|
|
Функциональная структурная схема системы автоматического регулирования с одной регулируемой величиной  представлена на рис. 14.
представлена на рис. 14.
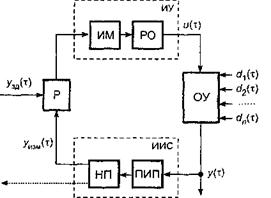
Рис. 14. Функциональная схема САР:
ОУ — объект управления; ПИП — первичный измерительный преобразователь; НП — нормирующий преобразователь; ИИС — информационно-измерительная система; Р — регулятор; ИУ — исполнительное устройство; ИМ — исполнительный механизм; РО — регулирующий орган
Система состоит из объекта управления (ОУ) и управляющего устройства, к которому можно отнести измерительное устройство (или информационно-измерительную систему, ИИС), автоматический регулятор и исполнительное устройство. В химической технологии ОУ может быть, например, реактор, в котором управляющее устройство должно поддерживать заданный технологический режим.
Рассмотрим подробно функциональные элементы, входящие в управляющее устройство.
Первичный измерительный преобразователь (ПИП — чувствительный элемент, сенсор) предназначен для преобразования регулируемого параметра в сигнал измерительной информации в форме, удобной для обработки и дальнейших преобразований. Например, термоэлектрический преобразователь, представляющий собой спай двух разнородных проводников, преобразует температуру в термоэлектродвижущую силу (ТЭДС).
Нормирующий преобразователь (НП) служит для взаимного согласования входящих в систему управления элементов и дистанционной передачи сигналов по каналам связи. Он осуществляет преобразование сигнала, полученного от ПИП, в эквивалентный ему унифицированный сигнал. Возможно преобразование сигнала одной физической природы в унифицированный сигнал той же самой физической природы (например, преобразование ТЭДС в унифицированный токовый сигнал от 0 мА до 5 мА) или в унифицированный сигнал другой физической природы (например, преобразование ТЭДС в унифицированный пневматический сигнал от 20 кПа до 100 кПа). Полученный унифицированный сигнал соответствует текущему значению регулируемого параметра и может передаваться не только к регулятору, но и к вторичному измерительному прибору или на системы более высокого уровня иерархии.
|
|
|
ПИП и НП являются элементами информационно-измерительной системы (ИИС).
Сигнал, соответствующий заданному значению регулируемого параметра  формируется задающим устройством (на рис. 14 не изображено). Величина задающего воздействия может быть постоянной или изменяться по определенному закону.
формируется задающим устройством (на рис. 14 не изображено). Величина задающего воздействия может быть постоянной или изменяться по определенному закону.
Примечание
В некоторых случаях задающее устройство конструктивно объединено с регулятором.
Регулятор (Р) с помощью элемента сравнения определяет отклонение текущего значения регулируемого параметра от заданного значения и формирует командный сигнал в соответствии с заложенным в нем алгоритмом регулирования. Сигнал, формируемый регулятором, по мощности не всегда достаточен, чтобы управлять ИУ, поэтому регулятор часто снабжается усилителем мощности.
Устройство автоматической системы управления, воздействующее на технологический процесс в соответствии с полученным от регулятора командным сигналом, называется исполнительным устройством (ИУ). Как правило, в нем можно выделить два функциональных элемента: регулирующий орган и исполнительный механизм.
Исполнительный механизм (ИМ) предназначен для усиления мощности командного сигнала, получаемого от регулятора, и воздействия на регулирующий орган (РО).
Примечание
Исполнительный механизм, перемещающий затвор регулирующего органа, часто называют исполнительным двигателем, или серводвигателем (сервомеханизмом).
|
|
|
Регулирующий орган (РО) — техническое средство изменения материального или энергетического потока, влияющего на регулируемую величину в ОУ. Это устройство, непосредственно воздействующее на ОУ для поддержания заданного значения регулируемой величины или изменения ее по заданному закону.
При исследовании динамических свойств системы регулирования по каналу задающего воздействия (вход — задающее воздействие , выход — регулируемая величина , возмущающее воздействие отсутствует или является постоянной величиной), систему автоматического управления удобно изображать упрощенной структурной схемой, представленной на рис. 15.
При исследовании динамических свойств системы регулирования по каналу возмущающего воздействия (вход — возмущающее воздействие  , выход — регулируемая величина , задающее воздействие является постоянной величиной) САР обычно изображают упрощенной структурной схемой, представленной на рис. 16.
, выход — регулируемая величина , задающее воздействие является постоянной величиной) САР обычно изображают упрощенной структурной схемой, представленной на рис. 16.
Для повышения устойчивости и улучшения динамических свойств системы управления в нее вводят корректирующие устройства (на рис. 14 не показаны). В зависимости от способов подключения корректирующие устройства делятся на последовательные и параллельные. С помощью последовательных корректирующих устройств происходит преобразование сигнала ошибки, и в управляющее воздействие вводятся составляющие, пропорциональные производной и интегралу от ошибки по времени. Параллельные корректирующие устройства (местные дополнительные обратные связи) подают сигнал с выхода элемента на вход одного из предыдущих. Функции корректирующих устройств могут выполнять компьютеры.
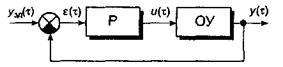
Рис. 15. Структурная схема САР по каналу задающего воздействия
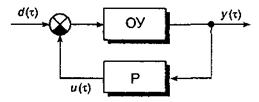 Рис. 16. Структурная схема САР по каналу возмущающего воздействия
Рис. 16. Структурная схема САР по каналу возмущающего воздействия
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 2548; Нарушение авторских прав?; Мы поможем в написании вашей работы!