КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Сопровождение цели «на проходе»
|
|
|
|
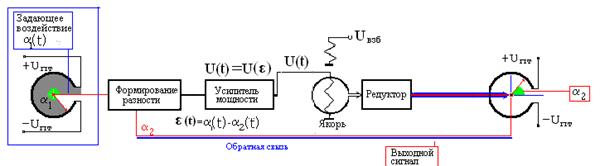
Структурная схема следящей системы
**************************************************************
3) Принцип действия фазового пеленгатора..
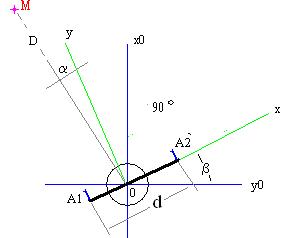
На расстоянии d две размещены две слабонаправленные антенны (A1 и A2) фазового пеленгатора. Расстояние d называется базой фазового пеленгатора. На расстоянии D >> d находится излучающий объект M. Требуется определить угол α – угол между нормалью к базе (eg) и направлением на объект M. Фазовый фронт принимаемого сигнала полагаем плоским т.к. λ<<D (λ – длина излучаемой объектом M волны).
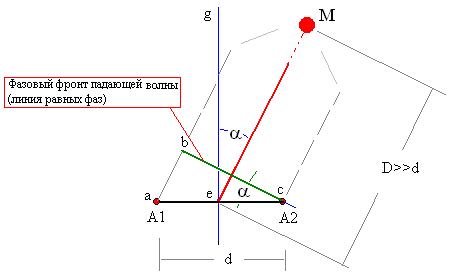
Очевидно, что разность расстояний от объекта M до антенн A1 и A2:
 .
.
Пусть объект излучает (или отражает) сигнал

f – частота сигнала (Гц), ψ – фаза излучаемого сигнала.
Разность фаз принимаемых антеннами A1 и A2, очевидно, определяется разностью расстояний от объекта M до антенн A1 и A2:
.
Разность фаз, сигналов, принимаемых антеннами
Откуда угол
Полагая без потери общности результатов ψ=0, сигналы, принимаемые антеннами А1 и А2 равны, соответственно

Полагая каналы приема сигналов идентичными, имеем  .
.
Измерив разность фаз принимаемых сигналов (φ), можно определить направление на объект. При малых углах α
Таким образом, для определения угла α достаточно измерить разность фаз принимаемых сигналов.
Структурная схема фазового пеленгатора.
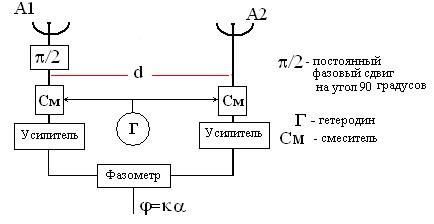
Постоянный фазовый сдвиг равный π/2 после антенны A1 введен для того, чтобы сигнал на выходе фазометра при угла α=0 оказался бы тоже равным нулю.
Сигнал, пропорциональный разностей фаз φ=(φ2–φ1) можно получить, например, перемножая сигналы u1(t)∙u2(t) и выделяя постоянную составляющую результата перемножения (q1 – некоторый коэффициент):
|
|
|


Воспользовавшись равенством
 ,
,
получим
 .
.
U – некоторая постоянная величина, зависящая от параметров перемножающего устройства. Средне по времени второго слагаемого равно нулю. Следовательно, выделив постоянную составляющую этого сигнала, получим


При малых углах φ имеем

где  ∙q2 – коэффициент пропорциональности.
∙q2 – коэффициент пропорциональности.
Структурная схема фазового пеленгатора:
На рисунке представлена структурная схема системы углового сопровождения цели сна базе фазового пеленгатора.
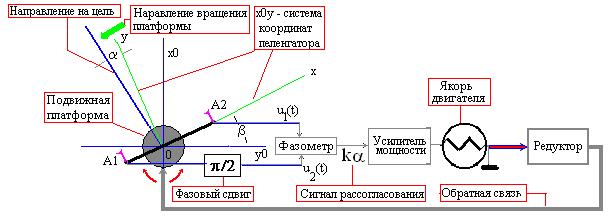
Сигнал рассогласования усиливается, усиленный сигнал подается на якорь двигателя, который через редуктор поворачивает подвижную платформу в направлении на цель.
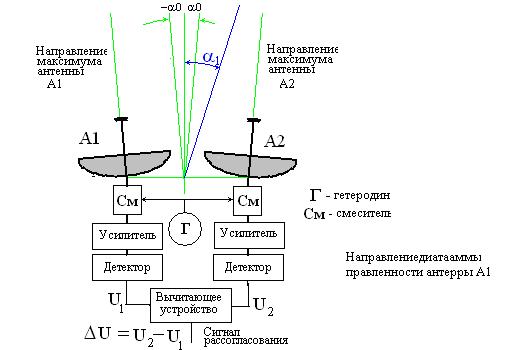
4) Амплитудный пеленгатор.
A1 и A1 –,диаграммы направленности антенны антенн a1 и A2, смещенные относительно друг друга на угол 2∙α0.
Зависимости сигналов на выходах детекторов и вычитающего устройства от направления на источник излучения (α):
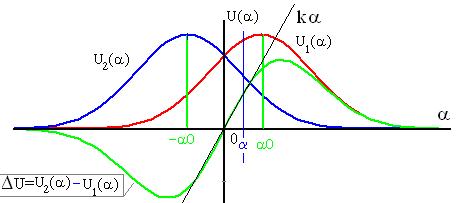
При малых рассогласованиях U(α)=k∙α. Отметим, что с ростом модуля угла рассогласования (|α|) сигнал рассогласования ΔU растет пока |α|<|α0| и при дальнейшем возрастании |α| уменьшается. Т.о. при малых углах рассогласования (|α|<<|α0|) систему можно считать линейной т.е. как и в случае фазового пеленгатора:
ΔU=k∙α.
Структурная схема углового сопровождения аналогична рассмотренной выше.
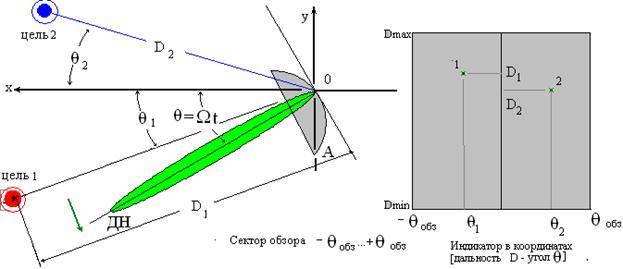
Антенна А с узкой диаграммой направленности совершает обзор сектора ± с угловой скоростью
с угловой скоростью  . В момент облучения цели на экране индикатора в координатах «угол-дальность» появляется отметка цели. Дальность до цели определяется по задержке принятого отраженного сигнала относительно изученного, угол – по угловому положению ДН в момент наступления максимума мощности принимаемого отраженного сигнала. Система функционирует и при наличии в секторе обзора нескольких целей. В такой системе информация о положении целей поступает дискретно (с периодом углового сканирования антенны). Обработка получаемой информации должна обеспечить, в частности:
. В момент облучения цели на экране индикатора в координатах «угол-дальность» появляется отметка цели. Дальность до цели определяется по задержке принятого отраженного сигнала относительно изученного, угол – по угловому положению ДН в момент наступления максимума мощности принимаемого отраженного сигнала. Система функционирует и при наличии в секторе обзора нескольких целей. В такой системе информация о положении целей поступает дискретно (с периодом углового сканирования антенны). Обработка получаемой информации должна обеспечить, в частности:
|
|
|
- оценку положения целей в промежутках между циклами обзора;
- разделение информации, получаемой от нескольких целей.
Дискретность системы в данном случае обусловлена самим принципом построения системы.
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 647; Нарушение авторских прав?; Мы поможем в написании вашей работы!