КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Автоматическая система управления качеством
|
|
|
|
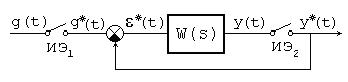
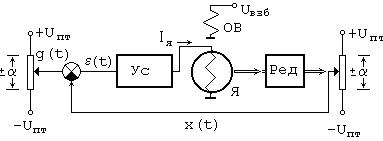
Структурная схема цифровой следящей системы.
Представлена структурная схема дискретной системы управления аналоговым объектом (объектом управления).
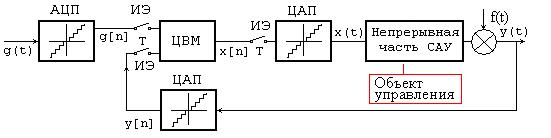
На структурной схеме:
- g(t), f(t), x(t) – задающее воздействие, возмущающее и управляющие воздействия, соответственно;
- T, n – период дискретизации и номер цикла (дискретное время), соответственно;
- ИЭ – импульсные элементы, замыкаются через интервал времени T.
-g(n), x(n) – дискретные значения задающего и управляющего воздействий, соответственно;
АЦП и ЦАП – преобразователи «аналог-цифра» и цифра-аналог»;
- y(t), y(n) – результат управления (результат воздействия на объект управления) в аналоговой и дискретной формах, соответственно.
Объектом управления является система изготовления некоторой продукции. Для этого необходим некоторый набор исходных компонент (от сырья до сложных входящих в готовую продукцию изделий).
После изготовления изделия поступают в систему контроля качества продукции.
Контролируются несколько параметров изделия. Их набор образует вектор параметров. Например: пусть контролируются размеры стабилизированного источника питания (x1 x2), выходное напряжение (u), уровень гармоник выходного сигнала (Δu), потребляемая мощность (P). Тогда вектор Y4 может быть представлен в форме:
 .
.
Этот вектор сравнивается с эталонным вектором:
 .
.
Аналогично образуются и остальные векторы (Y1..Y3).
В результате обработки полученной информации вырабатывается вектор воздействия на объект управления как некоторая функция от этих векторов U =f( Y1,Y2,Y3,Y4,Y40 ).
Для формирования вектора U используется информация:
- о состоянии оборудования (вектор Y1);
- о результатах пооперационного контроля (вектор Y2);
|
|
|
- о параметрах исходных материалов и комплектующих ((вектор Y3);
- о результатах измерения параметров изделия, например тип изготавливаемой в данный момент модификации изделия (вектор Y4).
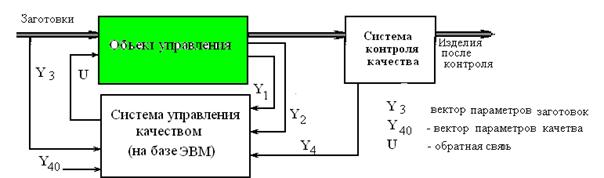
Отметим, что в систему управления качеством входит системы изготовления и контроля, которые обычно являются системами массового обслуживания. Как будет показано далее СМО – это инерционная система, которая описывается дифференциальных уравнений и может влиять на динамические свойства системы управления.
3) Классификация систем управления
Все системы автоматического управления по различным признакам делятся на следующие основные классы.
1. По основным видам уравнений динамики процессов управления:
• линейные системы;
• нелинейные системы.
В нелинейных системах хотя бы в одном звене нарушается линейность статической характеристики или же имеет место другое нарушение линейности уравнений динамики звена (появление произведения переменных, степени переменной отличной от единицы и т.п.).
В принципе все реальные системы нелинейны. Вопрос заключается в том, допустимо ли считать их линейными при МАЛЫХ изменениях их состояний (координат). Например, уравнение, описывающее движение массы (величиной m) на упругом подвесе (с жесткостью k) при скоростном демпфировании b)
 .
.
При наличии в системе многих инерционных элементов она описывается линейным дифференциальным уравнением более высокого порядка
Правая часть уравнения в свою очередь может содержать входное воздействие и его производные.
Теперь предположим, что упругость пружины (k) зависит от ее сжатия, например, что k=k0+k1x2 (жесткость пружины возрастает по мере ее сжатия). Тогда дифференциальное уравнение становится нелинейным
 .
.
Однако, если перемещения малы и k1x3<<k0x, то уравнение прибижонно можно считать линейным.
|
|
|
Если в системе имеется так называемое сухое трение, то дифференциальное принимает вид
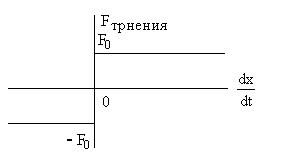
Это уравнение нелинейно при сколь угодно малых перемещениях массы.
2. Линейные системы разделяются на:
• системы с постоянными параметрами (стационарные), которые (описываются обыкновенными дифференциальными уравнениями с постоянными коэффициентами;
• системы с переменными параметрами (нестационарные), то есть с параметрами, зависящими от времени, которые описываются обыкновенными дифференциальными уравнениями с коэффициентами, зависящими от времени. Например
 ;
;
• системы с распределенными параметрами (описываются уравнениями в частных производных);
• системы с запаздыванием (уравнения с запаздывающим аргументом).
Системы с постоянными параметрами в отличие от систем с переменными называют иногда инвариантными во времени.
3. По характеру передачи сигналов различают:
• непрерывные системы;
• дискретные системы (импульсные и цифровые);
• релейные системы.
В непрерывных системах в каждом звене непрерывному изменению во времени входной величины соответствует непрерывное изменение выходной величины. Система управления непрерывна в целом, если статические характеристики всех ее звеньев непрерывны.
В системах дискретного действия хотя бы в одном звене при непрерывном изменении во времени входной величины выходная величина имеет вид отдельных импульсов, появляющихся через некоторые промежутки времени. Звено, преобразующее непрерывный входной сигнал в последовательность импульсов, называется импульсным.
Системы с цифровыми вычислительными устройствами (частный случай дискретных) [2] выдают на выходе через определенные промежутки времени результат вычислений в виде отдельных дискретных числовых значений.
В релейных системах хотя бы в одном звене при непрерывном изменении входной величины в некоторых точках процесса (при некоторых значениях входной величины) выходная величина изменяется скачком. Такое звено называется релейным. Статическая характеристика релейного звена имеет точки разрыва.
Аналоговое вычитающее устройство, формирующее сигнал рассогласования ε(t). ОУ – операционный усилитель.
|
|
|
4. По характеру процессов управления:
• детерминированные системы;
• стохастические системы (случайные параметры и процессы);
5. По характеру функционирования:
• обычные (неадаптивные) системы;
• адаптивные системы.
Адаптивные системы имеют дополнительные блоки и контуры для анализа качества процесса управления или внешних условий для адаптации системы к их изменениям.
К особому виду систем относят т.н. терминальные системы, в которых в качестве основной задачи ставится достижение определенного состояния в конечный момент времени, т.е. перевод системы из некоторого начального состояния A в некоторое состояние B. Здесь A и B могут быть как скалярными, так и векторными величинами.
Адаптивные системы можно разделить на несколько типов:
• системы с самонастройкой параметров;
• системы с переменной структурой;
• системы с самонастройкой программы (экстремальные системы);
• системы с самонастройкой структуры (самоорганизующиеся системы);
Наибольшее распространение получили в настоящее время системы с самонастройкой параметров. Необходимость в самонастройке возникает вследствие недостаточной достоверности информации об объекте регулирования или возмущающих и управляющих воздействиях на систему.
Среди экстремальных систем в особый класс выделяют иногда т.н. корреляционные экстремальные системы.
Иногда в качестве отдельного класса выделяют обучающиеся автоматические системы, которые работают в условиях неопределенности и малой априорной информации и использует специальные алгоритмы обучения (извлечения дополнительной информации об условиях функционирования и оптимизации).
Задачи теории:
• изучение динамических свойств и характеристик различных типовых звеньев автоматических систем любой физической природы и конструкции;
• формирование функциональных и структурных схем САР;
• построение динамических характеристик этих систем;
• определение ошибок и показателей точности замкнутых систем;
• исследование устойчивости замкнутых систем;
|
|
|
• оценка качественных показателей процесса управления;
• определение чувствительности систем к изменению параметров и других факторов;
• изучение различного вида корректирующих устройств, вводимых для повышения точности и улучшения динамических свойств систем;
• создание методов синтеза корректирующих устройств;
• разработка методов анализа и синтеза сложных многомерных систем автоматического управления и регулирования.
Блок-схема (блочная схема) САУ - изображение системы, составленное из условных обозначений физически существующих элементов системы (блоков) с указанием сигнальных и физических связей между ними.
Структурная схема - изображение системы регулирования в виде совокупности динамических звеньев однонаправленного действия, представленных в виде передаточных функций, с указанием связей между ними звеньями.
Структурная схема может быть составлена на основании дифференциального уравнения системы, или наоборот - по структурной схеме может быть найдено дифференциальное уравнение системы.
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 1115; Нарушение авторских прав?; Мы поможем в написании вашей работы!