КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Виды квантования непрерывных сигналов
Введение
Понятие о дискретных системах
Сигналы в системах автоматического управления (САУ) бывают непрерывными и дискретными. По этому признаку САУ делятся на системы непрерывного и дискретного действия. САУ непрерывного действия состоят из непрерывных элементов, то есть из элементов, у которых входной и выходной сигналы связаны непрерывной функциональной зависимостью. Дискретные системы содержат так называемые дискретные элементы (один или несколько). Выходные сигналы дискретных элементов даже при непрерывном изменении входного сигнала на выходе имеют сигналы с разрывами первого рода. Сигналы, имеющие разрывы первого рода, называются дискретными. Вид дискретного сигнала определяется характером работы дискретного элемента.
Дискретные элементы (звенья, системы) можно разделить три вида:
- Элементы, у которых дискретными являются входные и выходные сигналы, называют чисто дискретными (например, ЭВМ в системе управления, шаговые двигатели).
- Дискретные элементы с дискретными входными и непрерывными выходными сигналами называют дискретно-непрерывными (например, цифро-аналоговые преобразователи).
Дискретные элементы с непрерывными входными сигналами и дискретными выходными называют непрерывно-дискретными [13].
Преобразование непрерывного сигнала в дискретный называется квантованием.
Таким образом, в дискретных САУ непрерывно-дискретные элементы осуществляют квантование непрерывных сигналов. Характеристики непрерывно-дискретных элементов определяют вид квантования.
Различают квантования
- по уровню,
- по времени,
- по времени и по уровню.
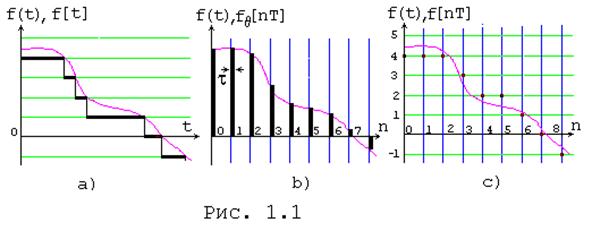
На рис. 1.1a изображен процесс квантования сигнала по уровню. Квантованый сигнал f[t] принимает только определенные дискретные значения. Изменение сигнала происходит скачком на один дискрет в момент достижения входным сигналом f(t) определенного уровня. При двух уровнях квантования квантователь эквивалентен двухпозиционному релейному элементу. Системы с квантованием сигналов по уровню называются релейными [18].
Квантование непрерывного сигнала по времени осуществляется импульсным элементом, который преобразует непрерывный сигнал в импульсный. Процесс преобразования непрерывного сигнала в последовательность импульсов называется импульсной модуляцией. Один из параметров импульса несет информацию о величине непрерывного сигнала в момент квантования.
|
На рис. 1.1b изображен процесс амплитудно-импульсной модуляции. Непрерывный сигнал f(t) преобразуется в последовательность прямоугольных импульсов fq[n] с постоянным периодом квантования T и длительностью импульса t, причем t<<T. Амплитуды импульсов qn равны значениям сигнала в моменты времени t=nT, n - целые числа qn= f(t)½t=nT.
Этот способ квантования называют амплитудно-импульсной модуляцией первого рода (АИМ-1). В дальнейшем рассматриваются только импульсные системы, использующие именно этот, наиболее распространенный, вид квантования.
Вообще говоря, при АИМ-1 Форма импульсов может отличаться от прямоугольной. Необходимо только чтобы их длительность (t) была конечной и достаточно малой (t<<T), а амплитуды были пропорциональны f(t)t=nT .
Применяется и так называемая АИМ-2, при которой длительность импульса t соизмерима с периодом дискретности T (естественно, t<T), а вершины импульсов повторяют форму непрерывного сигнала (так называемые системы с конечным временем съема данных). Такие системы используются сравнительно редко, а их анализ сложен. Здесь они не рассматриваются.
В некоторых случаях применяется так называемая широтно-импульсная модуляция (ШИМ) и фазо-импульсная модуляция (ФИМ) [15]. Эти виды модуляции обеспечивают больший, по сравнению с АИМ, динамический диапазон преобразования непрерывных сигналов. ШИМ и ФИМ менее чувствительны к перекрестным помехам, возникающим в каналах связи [13].
Встречаются случаи, когда период квантования не постоянен и даже случаен (например, при сопровождении многих целей радиолокатором с антенной решеткой). Здесь рассматриваются системы с постоянным периодом квантования.
Системы, использующие квантование сигналов по времени называются системами дискретного времени или ДВ-системами [16].
|
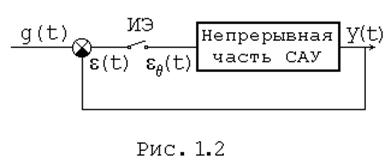
На рис. 1.2 изображена простейшая одноконтурная импульсная САУ. Импульсный элемент осуществляет модуляцию типа АИМ-1, преобразуя непрерывный сигнал рассогласования e(t) в последовательность импульсов eq(t) с периодом следования T. В результате воздействия на непрерывную часть САУ этого сигнала формируется сигнал y(t).
ДВ-системы, в которых используется преобразование непрерывных сигналов в последовательность импульсов, называются импульсными.
На рис. 1.1c изображен процесс квантования сигнала по времени и по уровню. Такой вид модуляции называется импульсно-кодовой [15] и осуществляется аналого-цифровыми преобразователями (АЦП). Непрерывный сигнал преобразуется в последовательность кодов, соответствующих значениям непрерывного сигнала в моменты t=nT.
ДВ-системы, использующие квантование сигналов по времени и по уровню, называются цифровыми системами.
Большинство дискретных систем содержат как непрерывные так и дискретные элементы различных видов. Обычно непрерывная часть ДВ-системы - это объект управления. В цифровых системах между импульсным элементом и объектом управления включается цифровое устройство (микропроцессорное или ЭВМ), которое обеспечивает требуемые алгоритмы и качество управления. Существуют и такие САУ, в которых все элементы дискретны.
Дискретными системы могут быть по своей природе. К таким, в частности, относятся: системы слежения за целью с помощью обзорной РЛС, системы автоматической подстройки частоты импульсных РЛС, системы управление предприятиями при определенной периодичности контроля результатов их деятельности, управление качеством изделий, обслуживание банковских кредитов и др. Системы делаются дискретными и преднамеренно, для реализации их полезных свойств.
|
Дата добавления: 2014-01-06; Просмотров: 3602; Нарушение авторских прав?; Мы поможем в написании вашей работы!