КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Стабилизация управляемых колес
Стабилизацией называют свойство управляемых колес сохранять нейтральное положение, соответствующее прямолинейному движению, и автоматически в него возвращаться /7/.
Управление автомобилем с плохой стабилизацией затруднено, и движение его неустойчиво, автомобиль постоянно отклоняется в стороны, и водитель вынужден поддерживать требуемое направление движения.
Управляемые колеса возвращаются в нейтральное положение под воздействием стабилизирующего момента. Возникновение стабилизирующих моментов связано в основном двумя причинами:
1) взаимодействием эластичных шин с опорной поверхностью;
2) наклоном шкворней поворотных цапф.
11.6.1. Стабилизирующие моменты шины
Рассмотрим взаимодействие шины, катящейся по опорной поверхности с боковым уводом.
При качении с уводом оси Х1 и Y1 пятна контакта колеса поворачиваются относительно своего обычного положения (осей X и Y) на некоторый угол d, а само колесо смещается относительно центра пятна (точка О1) вдоль оси Y на величину d (рис. 70,а).
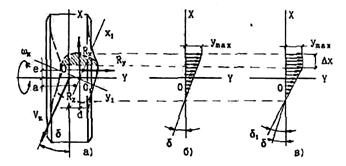
Рис. 70. Эпюры распределения элементарных боковых реакций и точки приложения результирующих сил
Как показывают исследования, при отсутствии в пятне контакта зон относительного проскальзывания эпюра распределения элементарных боковых реакций имеет вид, близкий к треугольнику (рис. 70,б). При этом наибольшие значения элементарных боковых реакций наблюдается в зоне наибольших боковых деформаций шины (заштрихованная часть пятна контакта на рис. 70,а). При дальнейшем увеличении боковой силы и возрастании угла увода d (рис. 70,в) эпюра элементарных боковых реакций приобретает форму трапеции. Это объясняется тем, что в задней части пятна контакта (зона Dх на рис. 70,а и в) дальнейший рост элементарных реакций прекращается и возникает боковое скольжение.
Из-за несимметричности распределения элементарных боковых реакций точка приложения боковой реакции Rу1 оказывается сдвинутой в заднюю часть пятна контакта на некоторое расстояние e относительно проекции центра колеса на опорную плоскость (точка О) и центра пятна контакта (точка О1). Вследствие несимметричности эпюр нормальных и касательных реакций точки приложения результирующих сил Rz1 и Rx1 также смещаются относительно точки О соответственно на расстояние a, b и d (рис. 70,а). При этом смещение Rу на расстояние е создает так называемый поперечный стабилизирующий момент шины:
Mсу = Rуe = Kувde. (263)
Смещение вектора Rx на расстояние d дает продольный стабилизирующий момент шины:
Mсх = Rxd. (264)
Смещение вектора Rz на расстояние а создает, как указывалось выше, момент сопротивления качению (Mf = Rza).
Алгебраическую сумму моментов Mсу и Mсх называют полным стабилизирующим моментом шины:
Mсш = Mсу + Mсх = Rуe - Rхd. (265)
Рассмотрим, от чего зависит величина указанных стабилизирующих моментов.
При увеличении d значение поперечного стабилизирующего момента (Mcу) вначале возрастает, а при достижении 6 - 8о снижается. Такой характер зависимости Mсу = f(d) объясняется следующим.
Увеличение d, согласно (250), приводит к возрастанию Mсу. При этом плечо е почти не изменяется. Когда угол бокового увода d достигнет значения 3 - 5o, в зоне Dх пятна контакта (рис. 70,а и в) возникает проскальзывание и эпюра элементарных боковых сил принимает трапециедальный характер (рис. 70,в). Это вызывает приближение линии действия боковой реакции Rу к центру пятна контакта, т.е. уменьшение плеча e.
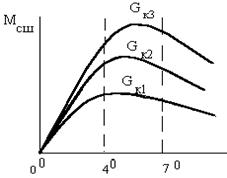 |
Рис. 71. Зависимость поперечного стабилизирующего момента шины от угла увода при разных вертикальных нагрузках (Gк1 < Gк2 < Gк3)
Действие стабилизирующих моментов шин управляемых колес проявляется следующим образом. Предположим, что при движении автомобиля управляемые колеса, получив толчок от неровности дорожного полотна, повернулись на некоторый угол q, причем (d = q) шины будут испытывать боковой увод. В результате боковой деформации шин и смещения линий действия продольных и поперечных сил последние образуют моменты, стремящиеся вернуть колеса в исходное положение. При этом поперечные стабилизирующие моменты шин на левом и правом колесе действуют в одном и том же направлении (рис. 72), стремясь вернуть колеса в исходное положение.
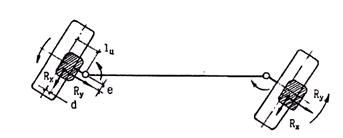
Рис. 72. Образование стабилизирующих моментов при случайном
повороте управляемых колес
В отличие от поперечных реакций, продольные реакции (Rx) образуют моменты относительно осей поворота колес (шкворней), которые действуют в противоположных направлениях, вследствие чего они в значительной мере компенсируют друг друга. Однако момент от продольной реакции на левом колесе равен Rx(lц- d), а на правом - Rx(lц+ d). Поэтому результирующий момент на колесах равен сумме продольных стабилизирующих моментов шин:
Мcx = Rx(lц + d) - Rx(lц - d) = 2Rxd. (266)
Заметим, что в рассматриваемой ситуации моменты Мcx не играют стабилизирующей роли, т.к. противодействуют поперечным стабилизирующим моментам шин и стремятся не сократить, а увеличить угол поворота управляемых колес. Величины d и Rx, как правило, малы, поэтому моменты Мcx не могут заметно ухудшить стабилизацию управляемых колес. Однако в тех случаях, когда величина продольных реакций резко возрастает (например при интенсивном торможении), моменты Мcx становятся ощутимыми и оказывают значительное влияние на стабилизацию управляемых колес.
Если управляемые колеса автомобиля одновременно являются и ведущими, то продольные усилия направлены в противоположную сторону, вследствие чего моменты Мcx становятся действительно стабилизирующими, т.к. способствуют возврату колес в исходное положение.
11.6.2. Стабилизирующие моменты за счет наклона и сдвига оси поворота колеса
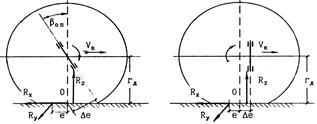
У современных автомобилей оси поворота управляемых колес имеют продольный и поперечный наклон. При этом у грузовых автомобилей и автобусов, имеющих неразрезную балку переднего моста, положение оси поворота определяется положением шкворня, а у легковых автомобилей, имеющих, как правило, независимую подвеску управляемых колес, - центрами шаровых шарниров. За счет продольного наклона оси поворота (рис. 73,а) плечо действия боковой реакции Rу возрастает от е до е' = е сosbоп + rд sinbоп. Это приводит к соответствующему увеличению поперечного стабилизирующего момента шины:
Mсу = Rу(е сosbоп + rд sinbоп)» Rу(е + rдbоп), (267)
где bоп - угол продольного наклона оси поворота колеса (шкворня).
а б
Рис. 73. Стабилизирующий момент при продольном наклоне (а) и сдвиге (б) оси поворота управляемых колес
Величины углов bоп у разных автомобилей неодинаковы. Чаще всего он назначается в пределах от 0 до 4о. У некоторых легковых автомобилей из-за особенностей кинематической схемы подвески угол продольного наклона может изменяется в зависимости от величины действующей нагрузки и достигать значений 10 - 12о. Иногда для уменьшения автоколебаний управляемых колес у легковых автомобилей продольный наклон оси делают отрицательным.
Увеличить плечо действия боковой силы можно не только за счет продольного наклона оси поворота, но и за счет ее смещения вперед относительно оси вращения колеса на некоторую величину De (рис. 73,б). Как и при наклоне оси, возрастание плеча приводит к возрастанию поперечного стабилизирующего момента на величину DMсу = Rу De.
Для стабилизации управляемых колес при очень малых скоростях оси их поворота имеют наклон в поперечной плоскости (рис. 74).
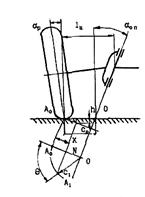
Рис. 74. Возникновение стабилизирующего момента при поперечном
наклоне оси поворота колеса:
aоп - угол поперечного наклона; aр - угол развала; lц - длина цапфы; сo - плечо обкатки.
При этом у большинства современных автомобилей углы aоп назначаются в пределах 4 - 10о. Наличие наклона осей шкворней приводит к тому, что при повороте управляемых колес на угол q происходит подъем передней части автомобиля на высоту h. Это объясняется тем, что точка Ао при повороте колеса вокруг оси поворота должна перемещаться по дуге АоА1 и опустится вниз на величину h относительно опорной поверхности. Та как в действительности этого произойти не может, поворот колеса вызовет подъем передней оси автомобиля на эту величину. При этом передняя часть автомобиля приобретает запас потенциальной энергии, равный dП = Gа1dh (Gа1 - вес автомобиля, приходящийся на передний мост). Работа, совершаемая при повороте управляемого колеса: dA = Мdq. Из равенства dП и dA следует, что величина прикладываемого момента равна:
М = Gа1dh/dq. (268)
Данная величина крутящего момента численно равна (если не учитывать трение в сочленениях рулевого привода) моменту, который препятствует повороту колес, т.е. стабилизирующему моменту.
Установим влияние угла наклона осей поворота колес (aоп), угла поворота управляемых колес (q) и веса автомобиля, приходящегося на управляемые колеса (Gа1), на величину стабилизирующего момента. Из рис. 74. следует:
h = x sinaоп; (269)
х = АoО - NO = (с1 - с1cosq); (270)
c1= сocosaоп; (271)
dh/dq = c sinq sinaоп. (272)
Учитывая (269 - 272), величину стабилизирующего момента можно выразить формулой:
Мcz = Gа1с1sinaопsinq. (273)
Таким образом, при повороте управляемых колес на угол q создается стабилизирующий момент, стремящийся вернуть их в исходное положение. Так как величина стабилизирующего момента прямо пропорциональна весу автомобиля, приходящемуся на переднюю ось, то Мcz называют весовым стабилизирующим моментом.
|
|
Дата добавления: 2014-01-06; Просмотров: 633; Нарушение авторских прав?; Мы поможем в написании вашей работы!