КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Учёт свойсв симметрии при раскрытии статической неопределимости методом сил
|
|
|
|
Лекция 13
Система называется симметричной, если она обладает плоскостью симметрии, и жёсткости симметричных элементов одинаковы. При расчёте таких систем оказывается возможным упростить решение задачи и снизить число искомых лишних неизвестных усилий за счёт рационального выбора основной системы.
Для примера возьмём симметричную раму, показанную на рис. 13.1, а. Рассмотрим случаи нагружения рамы симметричной и кососимметричной нагрузками.
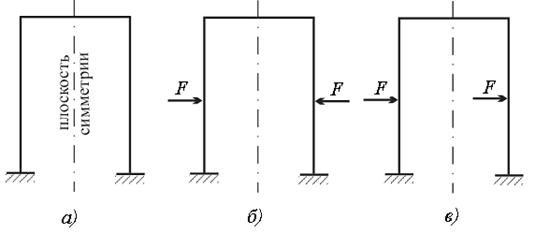
Рис. 13.1
Симметричной называют такую нагрузку, при которой внешние силы, приложенные к правой части системы, являются зеркальным отображением сил, приложенных к левой части (рис. 13.1, б).
Кососимметричной называют такую нагрузку, при которой силы, приложенные к правой половине системы, также являются зеркальным отображением сил, приложенных к левой половине, но противоположны им по знаку (рис. 13.1, в).
Аналогично можно классифицировать и внутренние силовые факторы. Напомним, что в общем случае действия сил в поперечном сечении стержня возникает шесть силовых факторов N, Qx, Qy, Mк, Mx, My. Причём внутренние силы и моменты, приложенные к правой и левой плоскостям сечения равны по величине и одинаковы по знаку. Отсюда следует, что продольная сила N и изгибающие моменты Mx, My являются симметричными внутренними силовыми факторами, так как представляют зеркальное отображение относительно плоскости сечения. Крутящий момент Mк и поперечные силы Qx,,Qy являются кососимметричными силовыми факторами.
Можно доказать, что у симметричной системы в плоскости симметрии при симметричной внешней нагрузке обращаются в нуль кососимметричные факторы, а при кососимметричной нагрузке - симметричные силовые факторы.
|
|
|
Покажем это на примере симметричной рамы, изображённой на рис. 13.1. Выберем для расчёта симметричную основную систему, разрезав раму по плоскости симметрии (рис. 13.2). К сторонам разреза приложим в качестве лишних неизвестных симметричные силовые факторы X 1 (изгибающие моменты), X 2 (продольные силы) и кососимметричные X 3 (поперечные силы).
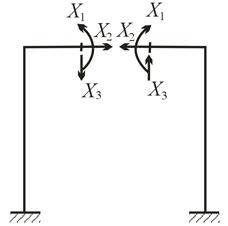
Рис. 13.2
Запишем систему канонических уравнений для трижды статически неопределимой рамы:
 (13.1)
(13.1)
Уравнения (13.1) выражают равенство нулю полных взаимных перемещений сторон разреза по направлениям лишних неизвестных. Так первое уравнение системы (13.1) означает равенство нулю взаимного угла поворота, второе уравнение - взаимного горизонтального перемещения, третье уравнение – взаимного вертикального перемещения. Заметим теперь, что в этих уравнениях коэффициенты δ ik, у которых один индекс принадлежит симметричному, а другой – кососимметричному фактору, обращаются в нуль, т.е.  .
.
Происходит это потому, что в симметричной раме не возникает взаимных кососимметричных перемещений под действием симметричных нагрузок. Точно также не возникает симметричных перемещений под действием кососимметричных факторов. Сказанное становится очевидным, если для определения перемещений δ ik применить способ Верещагина. В симметричной раме эпюра изгибающих моментов от симметричных силовых факторов будет симметричной (рис. 13.3, а, б), а от кососимметричных – кососимметричной (рис. 13.3, в)
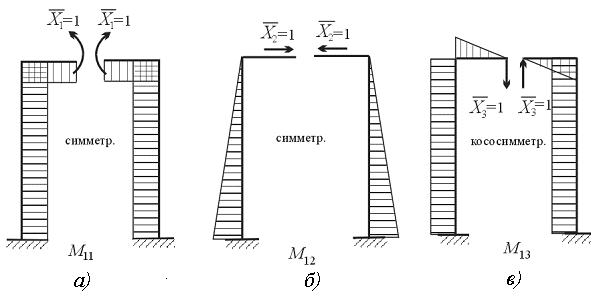
Рис. 13.3
При перемножении симметричной эпюры на кососимметричную, очевидно, получим нуль, в то время как перемножение симметричной эпюры на симметричную и кососимметричной на кососимметричную даёт результат, отличный от нуля.
Итак, вычёркивая из системы уравнений (13.1) коэффициенты, обращающиеся в нуль, получаем
 (13.2)
(13.2)
Как видим, система канонических уравнений упростилась.
|
|
|
Если при этом внешняя нагрузка симметрична (эпюра MF будет симметричной), то Δ3 F =0. Тогда из третьего уравнения системы (13.2) получаем, что кососимметричный фактор X 3=0.
Если нагрузка кососимметричная (эпюра МF будет кососимметричной), то Δ1 F= Δ2 F =0. Тогда первые два уравнения системы (13.2) образуют однородную систему
 ;
;
 ,
,
решением которой будет X 1 =X 2 = 0, т.е. равенство нулю симметричных силовых факторов.
Всё сказанное справедливо как для плоских, так и для пространственных стержневых систем.
Если нагрузка, приложенная к симметричной раме, не обладает ни прямой, ни косой симметрией, то её удобно разложить на симметричную и кососимметричную, как это показано, например, на рис.13.4. Задача, таким образом, распадается на две отдельные: симметричная рама с симметричной нагрузкой и рама с кососимметричной нагрузкой. Внутренние силовые факторы в заданной раме определяются в дальнейшем наложением полученных решений.
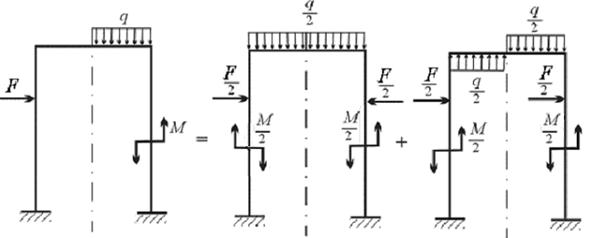
Рис. 13.3

|
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 3672; Нарушение авторских прав?; Мы поможем в написании вашей работы!