КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Тема Управляемость автомобиля
|
|
|
|
На управляемость влияют:
А. Дорога:
- закругления дороги;
- неровности и поперечный уклон дороги (косогор);
- боковой ветер (могучий);
- различие коэффициента сцепления или сопротивление качению правых и левых колес.
Б. Конструктивные параметры автомобиля:
- кинематическая схема подвески передних колес и привод к ним от рулевого механизма;
- техническое состояние привода и механизма;
- боковая эластичность шины;
- различное давление воздуха в шинах;
- неправильная установка управляемых колес;
- наличие зазоров в рулевом механизме и приводе;
- дисбаланс колес и шин;
- перекосы осей переднего и заднего мостов.
|
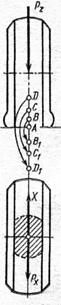
Жесткое колесо.
Под действием боковой силы (силы ветра, центробежной силы на повороте) колесо будет катиться в направлении первоначального движения, если сила сцепления будет больше боковой силы, когда Р станет меньше Р, колесо начнет скользить вбок.
Рφ > Рδ – колесо идет по заданной траектории.
Рφ < Рδ – колесо скользит вбок.

|
Эластичное колесо.
Под действием боковой силы вследствие эластичности шины происходит ее боковая деформация (прогиб) и колесо автомобиля катится под некоторым углом к своей средней плоскости
|
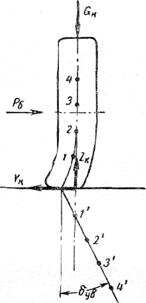
Качение колеса с уводом.
Если отметить на протекторе точки 1, 2, 3, 4, то под действием боковой силы Рδ отпечатки этих точек на следе в каждый момент времени смещаются вправо, т. е. колесо автомобиля при действии боковой силы движется под некоторым углом относительно своей средней продольной плоскости (линия 1, 2, 3, 4).
Угол δув - называется углом бокового увода. Величина этого угла тем больше, чем больше величина боковой силы и чем больше боковая эластичность шины. (см. рис. 4.2.) δв растет, вначале прямо пропорционально боковой силе (.) «а». При дальнейшем росте боковой силы (до точки «в») угол увода растет быстрее, что свидетельствует о начале частичного проскальзывания шины. Еще большее значение боковой силы (за (.) «в») вызывает скольжение колеса вбок.
|
|
|
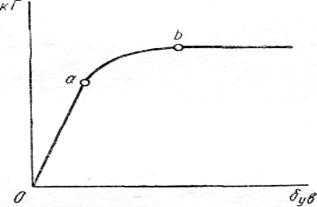
Зависимость между боковой силой и углом увода шины.
Боковая сила на участке Оа прямо пропорциональна углу увода:
| Рδ = Кув * δув |
где δув – угол бокового увода в градусах, Кув – коэффициент сопротивления боковому уводу шины.
Кув показывает, какую боковую силу надо приложить к колесу, чтобы вызвать его увод на 1 градус, в кг/град.
Чем меньше Кув, тем раньше начинается скольжение шины вбок.
При повороте на колесо действуют силы (рис. 4.1. а, б):
- Gk - вертикальная нагрузка;
- Pδ - боковая сила;
- Mk - крутящий момент (если колесо ведущее).
В результате действия этих сил возникают реакции: Zk, Yk, Xk Геометрическая сумма R = √ Yk + Xk → R = √ Yk2 + Xk2 - это величина равнодействующей R.
Чтобы не было бокового проскальзывания колёс величина R должна быть меньше или равна силе сцепления колёс с дорогой т. е. R ≤ φ Zk или
φ Zk ≥ √ Yk2 + Xk2
найдём, какой должна быть величина боковой реакции Ук.
(φ Zk)2 ≥ Yk2 + Xk2 →
Yk2 ≤ φ Zkл - Xk2 →
Yk ≤ √ φ Zk2 - Xk2 →
Следовательно, чтобы не было бокового проскальзывания колеса, необходимо выдержать условие, данное приведённой выше формулой.
На рис.4.2.1 изображена схема поворота автомобиля. Точка “O” – мгновенный центр поворота.
К точке К приложена толкающая сила F. Разложим её на силы Fy и Fx.
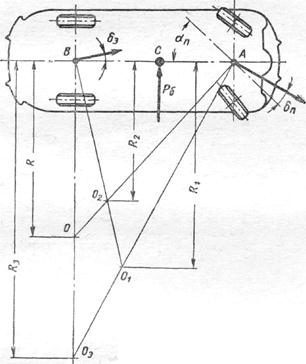
Рис. 4.2.1. Схема поворота автомобиля
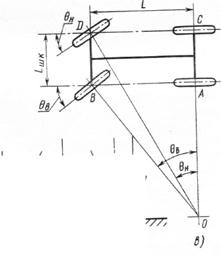
Соотношение углов поворота управляемых колёс. Определение среднего радиуса поворота автомобиля.
|
Углы соотношения управляемых колёс.
|
|
|
Выявим соотношения между наружным и внутренним углами поворота (рис. 4.2.2.).
Из треугольника ОВС: ctg Qн = ОВ / L Из треугольника ОAD: ctg Qв= ОА / L

где М – межшкворневое расстояние, L – база.
Средний радиус поворота

из треугольника ОЕF:
Если рулевое колесо повернуть на угол γрк, то управляемые колёса на средний угол Θ. γрк / Θ = iрм γрк = Θ i2м
Рис. 4.2.2
Рис.4.3. Схема движения автомобиля на повороте с боковым уводом.
4.4 При повороте автомобиля и отсутствии бокового увода автомобиль совершил бы поворот радиусом R=ОВ (Рис. 4.3.) около мгновенного центра поворота “O”, определяемого как точка пересечения перпендикуляров ВО и АО направление движения передней оси зависит от угла поворота управляемых колёс.
Вследствие бокового увода
1.действия боковой силы приложенной в точке центра тяжести задней оси на угол и передней оси, направление их движения изменяется, и новым центром поворота будет точка, определяемая перпендикулярами и к действительным направлениям движения передней и задней осей с учётом бокового увода. Радиус поворота равен расстоянию от точки до продольной оси автомобиля.
Величина зависит от угла поворота колёс и соотношения углов увода передней и задней осей.
4.5 примеры:
1. пример: передние колёса не подвергаются уводу (жёсткие) а задняя ось движется с углом бокового увода.
Центр поворота
2 пример: задняя ось не подвергается боковому уводу.
В этом случае центром поворота будет точка, а радиус поворота.
Таким образом: при одном и том же угле поворота управляемых колёс тот автомобиль, у которого угол увода задней оси больше угла увода передней оси, будет двигаться по кругу меньшего радиуса, чем тот, у которого угол увода задней оси меньше угла увода передней.
В первом случае автомобиль будет обладать излишней поворачиваемостью во втором – недостаточной поворачиваемостью.
|
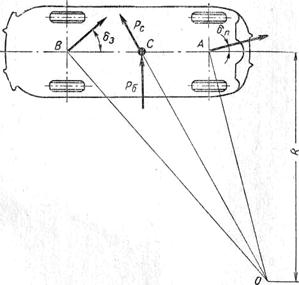
Схема движения автомобиля с излишней поворачиваемостью.
При действии силы на автомобиль с излишней поворачиваемостью он начнет двигаться по кругу с центром в (.) О. В силу этого возникает центробежная сила, которая будет направлена в ту же сторону что и боковая сила
В результате – углы увода увеличиваются, радиус поворота уменьшится центробежная сила ещё больше увеличится,что ещё больше увеличит углы увода. Автомобиль на больших скоростях неустойчив.
|
|
|
|
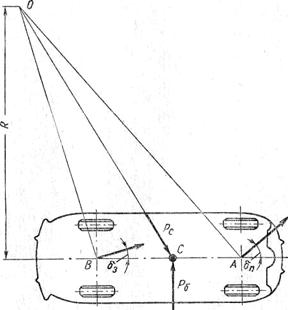
Схема движения автомобиля с недостаточной поворачиваемостью.
При действии на автомобиль с недостаточной поворачиваемостью при действии на него боковой силы вследствие бокового увода стремится поворачиваться в сторону действия боковой силы. Возникшая при этом центробежная сила направлена в сторону противоположную боковой силе. Она стремится уменьшить углы увода осей, тем самым выравнивает направление движения автомобиля.
чтобы придать автомобилю свойство недостаточной поворачиваемости надо:
- центр тяжести расположить ближе к передней оси.
- давление воздуха в шинах передних колёс должно быть меньше чем в задних
- правильно подобрать конструкцию подвески. Автомобиль с излишней поворачиваемостью стремится двигаться по кругу меньшего радиуса, чем это соответствует управляемым колесам. Скорость движения автомобиля, при которой начавшийся поворот будет непрерывно возрастать за счет бокового увода шин при неизменном положении управляемых колес, называют критической скоростью по условию бокового увода. Она определяется по формуле:
| Vкр | = | √ | gL |
| G2 | - | G1 | |
| K δув2 | K δув1 |
где K δув2 и K δув1 - коэффициенты сопротивления боковому уводу передней и задней осей.
Следовательно, для обеспечения управляемости и устойчивости автомобиля с излишней поворачиваемостью необходимо, чтобы его максимальная скорость была меньше критической скорости.
При этом: если
| G2 | = | G1 |
| K δув2 | K δув1 |
Vкр = ∞
| G2 | > | G1 |
| K δув2 | K δув1 |
Vкр также высока
| G2 | < | G1 |
| K δув2 | K δув1 |
Vкр минимальна
4.6 Колебание управляемых колес
Рис. 4.6 Наклон колес автомобиля с зависимой подвеской
Управляемые колеса автомобиля
При движении по неровной дороге, из-за неуравновешенности и эксцентричности колес, а также из за особенности рулевого привода колеблется вокруг шкворней. Это приводит к потере управляемости и устойчивости, а также к интенсивному износу деталей рулевого привода и износу шин. У автомобилей с зависимой подвеской при наезде на препятствие вызывается наклон обоих колес (Рис. 4.6) вызывается деформация шин и упругих элементов подвески. Возникающие при этом восстанавливающие моменты сил упругости вызывают угловые колебания колёс в поперечной и вертикальной плоскости.
|
|
|
Наклон переднего колеса вбок вызывает стремление колеса повернуться вокруг шкворня. Это вызывает виляние колеса.
Моменты управляемых колес, действующие перпендикулярно плоскости вращения и поворачивающие их вокруг шкворней, носят название гироскопических моментов.
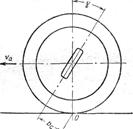
У неуравновешенного колеса (Рис. 4.7) центробежная сила, создаваемая неуравновешенным участком создает относительно шкворня поворачивающий момент, равный.
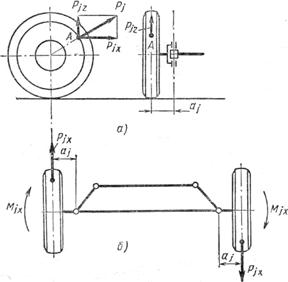
На рис. 4.7 а) неуравновешенного колеса
б) неуравновешенных управляемых колес
У неуравновешенного колеса второго в зависимости от взаимного положения колес и неуравновешенных масс в процессе движения поворачивающие моменты будут действовать в одном или разных направлениях. Эти моменты будут иметь максимальное значение в том случае, когда неуравновешенные участки направлены в противоположные стороны.
Вертикальные составляющие центробежных сил вызовут колебания колес в поперечной плоскости.Действие указанных моментов будет меняться по направлению при каждом обороте колеса. Точно такое же действие на колебание колёс оказывает эксцентричность колёс. На больших скоростях неуравновешенные силы возрастают на столько, что могут вызвать виляние управляемых колёс.
Колебание колёс устраняют:
- Применением независимой подвески.
- применением стабилизаторов поперечной устойчивости, амортизаторов
- Усовершенствование рулевого привода.
- Балансировка колёс.
- Контроль состояния подвески рулевого привода.
4.7. Стабилизация управляемых колёс.
Стабилизацией управляемых колёс называется способность автоматически сохранять положение, соответствующее прямолинейному движению автомобиля и автоматически на него возвращаться.
Стабилизация управляемых колёс обеспечивается поперечным и продольным наклоном шкворня и боковой эластичностью шин.
|
Рис 4.9 Схема поперечного наклона шкворня
|
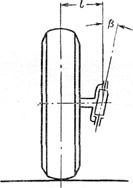
Рис 4.8. Схема продольного наклона шкворня
При поперечном наклоне шкворней управляемых колёс автомобиля (угол рис 4.8) их поворот в ту или другую сторону от нейтрального положения сопровождается при поднимании балки передней оси (или рычагов подвески) Этому препятствует вес автомобиля.
Таким образом, появление стабилизирующего эффекта зависит от веса приходящегося на переднюю ось автомобиля, величины угла и расстояние от оси колеса до оси шкворня.
При продольном наклоне шкворня (угол рис 4.9) между его осью и точкой приложения боковой реакции образуется плечо. Возникающий при отклонении колёс от нейтрального положения стабилизирующий момент зависит от плеча и величины боковой реакции. Угол продольного наклона шкворня считается положительным, если верхний конец шкворня наклонён назад. Значения углов зависит от эластичности шин. В следствии их эластичности возникает стабилизирующий момент, в следствие которого на некоторых легковых автомобилях можно отказаться от продольного наклона шкворня. Угол развала (рис 4.10) предотвращает наклон управляемых колёс в случае износа поворотных цапф и позволяет уменьшить плечо обкатки, не увеличивая при этом поперечного наклона шкворня. Уменьшение плеча обкатки снимает величину усилия, необходимого для поворота рулевого колеса.
В результате развала управляемых колёс создаются дополнительные боковые силы и моменты действия, которых увеличивает нагрузки в рулевом приводе а также сопротивление качению и износ шин.
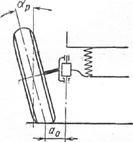
Рис 4.10. Схема развала управляемых колёс.
Для уменьшения боковых сил, действующих в контакте колеса с опорной поверхностью, управляемые колёса устанавливаются в вертикальной плоскости под некоторым углом к плоскости симметрии автомобиля.
(Рис 4.11) Этот угол называется углом схода.
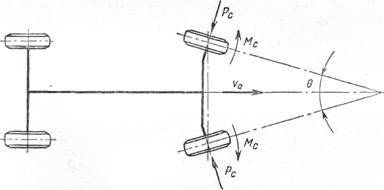
Рис 4.12. Схема схождения колёс
Схождением колёс называется установка управляемых колёс с углами схода.
Это разность расстояний между плоскостями колес одной оси спереди и сзади, замеренных в горизонтальной плоскости на высоте центров колес на заданном расстоянии от центров.
В результате установлен с углом схода управляемые колеса катятся с уводом, при этом возникают силы Рс, действующие перпендикулярно плоскости колес и соответствующие моменты Мс, стремящиеся повернуть колеса в сторону, противоположную схождению. Вследствие этого, нейтрализуются боковые реакции, вызываемые развалом колес.
5. Факторы, влияющие на управляемость автомобиля(автопоезда).
- конструкция и техническое состояние шин (водоэвакуационный канал)
- тип передней оси (подвеска)
- нейтральная поворачиваемость (шинная)
- креновая поворачиваемость (тип подвески)
- стабилизация управляемых колес
- усилитель рулевого привода- электроусилитель с червячной передачей и электронным блоком управления (чем выше скорость движения автомобиля, тем более снижается действие усилителя).
- система стабилизации движения (ASMS)- предотвращает и корректирует ошибки водителя при управлении автомобилем (содержит многочисленные датчики: поворот рулевого колеса, число оборотов коленчатого вала, боковое ускорение)
- полноуправляемый автомобиль (поворот задних колес при скорости до 35 км/ч в сторону противоположную повороту передних колес, причем с ростом скорости угол уменьшается. Затем синхронно с передними но на меньший угол - управление с электронникой).
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 1776; Нарушение авторских прав?; Мы поможем в написании вашей работы!