КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Кинематический анализ плоских механизмов с низшими парами
 |
Кинематическая модель механизма со степенью подвижности  = 1 может быть получена дифференцированием по обобщённой координате
= 1 может быть получена дифференцированием по обобщённой координате  функции положения звеньев, получаемой из рассмотрения замкнутого контура, который образован звеньями механизма. Производная перемещения по обобщенной координате называется первой передаточной функцией или аналогом скорости. Рассмотрим на пример кривошипно – ползунного механизма, представленного на рис. 2 .2. Приняв обозначения
функции положения звеньев, получаемой из рассмотрения замкнутого контура, который образован звеньями механизма. Производная перемещения по обобщенной координате называется первой передаточной функцией или аналогом скорости. Рассмотрим на пример кривошипно – ползунного механизма, представленного на рис. 2 .2. Приняв обозначения

 и
и  из рассмотрения проекций звеньев на ось
из рассмотрения проекций звеньев на ось  , получим координату точки
, получим координату точки  поршня в функции двух переменных
поршня в функции двух переменных  ,
,
 ,
,
где – угол поворота кривошипа 1, принимаемый за обобщённую координату, – угол поворота шатуна 2, зависящий от .
Рис. 2.2. Скорости и нагрузки кривошипно – ползунного механизма (VS – скорость точки S, G2 – сила тяжести звена 2, F3 – сила давления газов на поршень 3 диаметра d, υ2 – угол между силой G2 и скоростью VS центра масс звена 2): 1 – кривошип; 2 – шатун; 3 – поршень
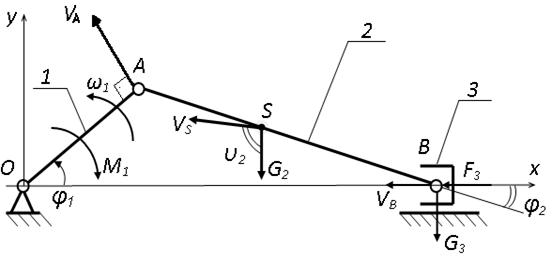
Поэтому перемещение поршня 3 (рис. 2.2 ), отсчитанное от крайней (мёртвой) точки 
 ,
,
зависит от одной обобщённой координаты
 ,
,
путём исключения угла , который определяется из рассмотрения проекций звеньев механизма на ось 
L OA sin j1 - L AB sin j2 = 0.
Отсюда получим угол наклона шатуна, обозначая λ21 = L AB / L OA
Дифференцируя полученные уравнения по обобщённой координате, получим систему уравнений, включающую две передаточные функции:  – аналог скорости поршня и
– аналог скорости поршня и  – мгновенное передаточное отношение звеньев 2 и 1
– мгновенное передаточное отношение звеньев 2 и 1

Разрешая систему уравнений относительно аналога скорости поршня, получим

Делая замену  и пренебрегая незначительными изменениями
и пренебрегая незначительными изменениями  в знаменателе, получаем разложение первой передаточной функции в ряд Фурье, которое имеет две гармоники
в знаменателе, получаем разложение первой передаточной функции в ряд Фурье, которое имеет две гармоники
|
|
|
Разложение в ряд Фурье второй передаточной функции получим, дифференцируя первую передаточную функцию по обобщённой координате
Важно отметить, что обе передаточные функции кривошипно – ползунного механизма имеют две гармонические составляющие. Кинематические диаграммы кривошипно – ползунного механизма, связывающие его передаточные функции с углом  , представлены на рис. 2.3.
, представлены на рис. 2.3.
Рис. 2.3. Кинематические диаграммы кривошипно – ползунного механизма:
 – перемещение поршня, – аналог скорости точки
– перемещение поршня, – аналог скорости точки  поршня,
поршня,  – мгновенное передаточное отношение звеньев,
– мгновенное передаточное отношение звеньев,  – аналог ускорения поршня
– аналог ускорения поршня
 | |||||
 | |||||
 |
Рис. 2.3. Кинематические диаграммы кривошипно – ползунного механизма:
– перемещение поршня, – аналог скорости точки поршня, – мгновенное передаточное отношение звеньев, – аналог ускорения поршня
На рис. 2.4 представлена кинематическая схема механизма качающегося цилиндра, применяющегося в гидравлическом приводе машин.
Контрольные вопросы
1. Что понимается под кинематической моделью машины?
2. В чём состоит отличие кинематической модели от динамической?
3. Какие допущения приняты при создании кинематической модели?
4. Как можно перейти от передаточных функций к скоростям и ускорениям?
5. Чем определяется передаточное отношение зубчатой передачи с неподвижными осями?
6. Каким методом определяется передаточное отношение планетарной зубчатой передачи?
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 659; Нарушение авторских прав?; Мы поможем в написании вашей работы!