КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Простейшие навесные захваты. Классификация и требования к захватам
|
|
|
|
Классификация и требования к захватам
Грузозахватные устройства
Технико-экономические показатели работы машин и устройств
Экономическую оценку эффективности эксплуатации машины в различных условиях производят, прежде всего, по себестоимости единицы продукции (выполненной работы):
с = (с1 + с2 + с3) / Пэ. см = см.-см / Пэ. см,
где с1, с2 – затраты, зависящие соответственно от годового и внутрисменного режима работы, руб/см; с3 – затраты, связанные с заработной платой операторов, обслуживающих данную машину, руб/см; см.-см – сумма среднесменных затрат (стоимость машино-смены).
Затраты 1-ой группы:
с1 = Sам + Sед.вр,
где Sам – амортизационные отчисления (на капитальный ремонт и реновацию), руб/см; Sед.вр – единовременные затраты (монтаж, демонтаж и перемещение машины с объекта на объект), руб/см.
Затраты 2-ой группы:
с2 = Sизн + SТО + SГСМ,
где Sизн – расходы на быстроизнашивающиеся детали и инструмент, руб/cм; SТО – расходы на техническое обслуживание и текущий ремонт, руб/см; SГСМ – расходы на топливо, смазочные и обтирочные материалы, руб/см.
Себестоимость отражает, таким образом, текущие (эксплуатационные) затраты на единицу выполненной работы. Однако для полной оценки эффективности эксплуатации машин и выбора обоснованного варианта механизации ПРР необходимо учитывать также и капитальные затраты, связанные с приобретением машины. Капитальные затраты являются единовременными и, чтобы была возможность сопоставления их с себестоимостью, они должны быть приведены к удельной форме.
Удельные капитальные затраты (капиталовложения) определяют как:
Kуд = Цо а / (nсм Пэ. см),
где Цо – отпускная цена машины, руб; а – коэффициент, учитывающий расходы по первоначальной доставке машины с завода-изготовителя к потребителю; nсм – число смен работы машины в году.
|
|
|
Удельные приведенные затраты, учитывающие и себестоимость, и удельные капитальные затраты, является тем показателем, по которому можно сравнивать машины между собой и выбирать наилучший вариант механизации ПРР.
Zуд = с + Ен Куд ® min,
где Ен – нормативный коэффициент эффективности капиталовложений, учитывающий срок окупаемости машины.
При нормативном сроке окупаемости Ток = 7 лет, коэффициент Ен = 1/Ток = 0,15.
Для выполнения подъемно-транспортных операций ПРМ оснащают грузозахватными устройствами (захватами).
К захватам предъявляются определенные требования. Они должны:
- соответствовать свойствам и форме перемещаемого груза, производственным условиям, в которых выполняется работа;
- обеспечивать полную сохранность груза и тары;
- обеспечивать быстрый захват и освобождение груза;
- иметь минимальную собственную массу при достаточной прочности;
- быть удобными в эксплуатации при минимальных трудовых и эксплуатационных затратах;
- удовлетворять требованиям техники безопасности.
Захваты классифицируются по следующим признакам:
- виду перемещаемого груза;
- степени механизации труда;
- сложности установки на машине;
- типу привода.
По виду перемещаемого груза захваты могут быть:
- для навалочных и сыпучих грузов (ковши, дисковые питатели и т.п.);
- для штучных и длинномерных грузов (стропы, подвески, клещевые захваты и др.);
- для контейнеров и пакетированных грузов (автостропы, вилочные захваты и т.д.);
- для металлолома (грузоподъемные электромагниты).
По степени механизации труда захваты делятся на:
- эксплуатируемые с применением ручного труда (стропы, подвески и т.п.);
- механические (грейферы, дисковые питатели, шнеки и др.);
- полуавтоматические (например, захват для силикатного кирпича);
|
|
|
- автоматические (автостропы).
По сложности установки на грузоподъемной машине:
- не требующие изменения РО (стропы, подвески, траверсы и др.);
- требующие незначительных изменений (грейферы, автостропы);
- требующие специальных конструкций РО (ковши, дисковые питатели).
По типу привода захваты делятся на:
- бесприводные (стропы, подвески и др.);
- приводные (грейферы, автостропы и др.).
Из приведенной классификации видно, что простейшими захватами являются различного рода стропы, подвески, клещевые захваты.
Они навешиваются на грузовые крюки грузоподъемных машин (как правило, кранов), предназначены для работы со штучными грузами различной формы и массы и длинномерными грузами и являются наиболее распространенными.
 Стропы предназначены для подъема, опускания и перемещения различных штучных грузов. Их изготавливают, как правило, из стального каната (троса) или цепей одно-, двух-, четырех- и шестиветвевыми с крюками на конце каждой ветви и коушем, скрепляющим другие концы ветвей в один узел с кольцом для навешивания на крюк крана или безблочной стрелы автопогрузчика.
Стропы предназначены для подъема, опускания и перемещения различных штучных грузов. Их изготавливают, как правило, из стального каната (троса) или цепей одно-, двух-, четырех- и шестиветвевыми с крюками на конце каждой ветви и коушем, скрепляющим другие концы ветвей в один узел с кольцом для навешивания на крюк крана или безблочной стрелы автопогрузчика.
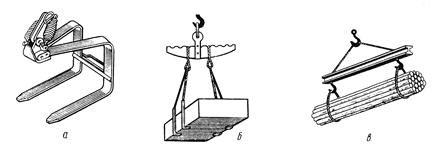
 Клещевые захваты работают по принципу затягивания груза двумя рычагами при его подъеме. Они являются сменными грузозахватными устройствами, специализированными, как правило, для определенного вида грузов. В частности, их применяют для грузов цилиндрической формы (бочки, рулоны бумаги и др.), для грузов в ящиках. Нередко их используют и при работе с длинномерными грузами; при этом клещевые захваты подвешивают (не менее двух) на траверсах.
Клещевые захваты работают по принципу затягивания груза двумя рычагами при его подъеме. Они являются сменными грузозахватными устройствами, специализированными, как правило, для определенного вида грузов. В частности, их применяют для грузов цилиндрической формы (бочки, рулоны бумаги и др.), для грузов в ящиках. Нередко их используют и при работе с длинномерными грузами; при этом клещевые захваты подвешивают (не менее двух) на траверсах.
Согласно определению, комплексная механизация и автоматизация погрузо-разгрузочных и внутрискладских операций со многими видами грузов возможны только при использовании таких грузозахватных устройств, которые исключали бы применение ручного труда не только на операциях по подъему и перемещению груза, но и по строповке, захвату груза и освобождению от захвата. Таким требованиям отвечают полуавтоматические и автоматические захваты.
|
|
|
Бесприводные полуавтоматические захваты исключают ручной труд только на одной операции (как правило, при освобождении груза от захвата). К таким захватам относятся, например, строп для раскрывающегося контейнера, захват с устройством для самоотцепки контейнеров.
Бесприводные автоматические захваты, позволяющие полностью исключить ручной труд, используют на заводах железобетонных изделий и при работе с пакетами силикатного кирпича.
|
|
|
Дата добавления: 2014-01-06; Просмотров: 1791; Нарушение авторских прав?; Мы поможем в написании вашей работы!