КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Исторический обзор
|
|
|
|
Лекция 1
В течение всей своей истории человек пытается управлять миром, в котором он живет. С самого начала своего существования он понял, что он со свимим слабыми силами не в состоянии противостоять окружающему его животному миру. Он мог только выжить, используя свой ум и умение. Его основное ценное качество, возвышающее его над другими формами жизни на земле, –более совершенный интеллект. Человек каменного века создал орудия труда и оружие из кремня, из камня и костей и обнаружил, что он может приручать и дрессировать других животных, чтобы они выполняли его требования и приказы, и таким образом было дано начало самым ранним видам систем управления. В скором времени лошадь и бык были использованы для выполнения различных задач, включая транспортировку людей и грузов. Прошло много времени, прежде чем человек научился заменять животных машинами.
Основой любой системы управления является ее способность измерять свой выходной сигнал и совершать корректирующие действия, если его величина отклонилась от некоторого заданного (желаемого) значения. Такая способность связана, в свою очередь, с необходимостью иметь датчики или чувствительные устройства. Человек имеет несколько встроенных органов чувств, по сути датчиков, которые он использовал издавна для управления своими собственными действиями, действиями других людей и сравнительно недавно для управления механизмами и машинами. В управлении автомобилями самым важным датчиком или сенсором, например, является зрение, однако слух и обоняние таже способствуют действиям водителя.
Первый важный и большой шаг в проектировании механизмов и машин, который возвестил о начале промышленной революции, это создание паровой машины (парового двигателя). Проблема, с которой столкнулись в то время инженеры, состояла в том, как управлять скоростью вращения двигателя без непосредственного участия человека. Из различных опробованных методов самым успешным оказалось использование конического (конусообразного) маятника, угол отклонения которого был функцией (но не линейной функцией) угловой скорости вала двигателя. Это принцип был применен Джеймсом Уаттом в 1769 году в спроектированном им шаровом или центробежном регуляторе скорости. Так появилась на свет первая автоматическая система для управления техническим объектом (машиной).
|
|
|
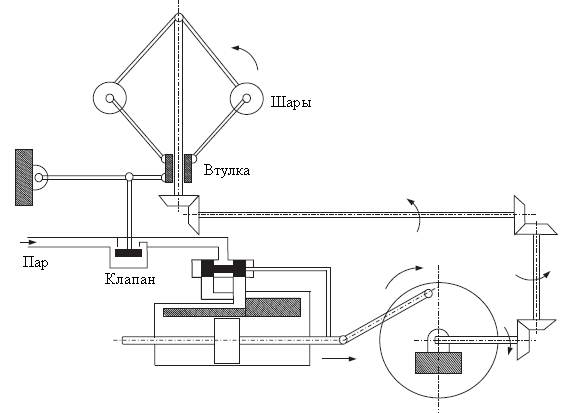
Рис. 1
Принцип действия регулятора Уатта показан на рис. 1, из которого видно, что изменения скорости вала двигателя приводят к различным коническим углам центробежного регулятора. Это в свою очередь приводит к линейному перемещению втулки, которая управляет расходом пара, поступающего к двигателю посредством клапана. Примерно в то же время русский инженер Иван Ползунов (1765) построил регулятор питания котла паровой машины, который, наряду с регулятором Уатта, относится к числу первых промышленных автоматических устройств.
Уатт был инженером практиком и не располагал временем для теоретического анализа созданной им системы. Он, однако, заметил, что при некоторых условиях в работе двигателя появляется рыскание, когда его скорость колеблется относительно заданного значения. Устранение рыскания или как это действие обычно называют устранением неустойчивости явлется важной стадией в проектировании всех систем управления.
В своей статье «О регуляторах» Джеймс Максвелл (1868) получил нелинейные дифференциальные урвнения, описывающие работу регулятора, линеаризовал их относительносостояния (точки) равновесия и показал, что устойчивость системы зависит от корней характеристического уравнения с отрицательной вещественной частью. В работе Ивана Алексеевича Вышнеградского «О регуляторах прямого действия» регулятор и объект регулирования впервые, как и в статье Максвелла, рассмотрены в единстве в виде системы регулирования, что позволило поставить задачу анализа динамических свойств системы регулирования в целом. Проблема создания критерия, пределяющего уловия устойчивости системы, была решена Гурвицем (1875) и Раусом (1895). Решение этой проблемы применительно к нелинейным системам было найдено нашим соотечественником русским математиком Александром Михайловичем Ляпуновым (1893). Результаты А.М. Ляпунова явились основой для создания различных методов анализа и синтеза систем управления движением. Существенный, весьма важный математический аппарат для теоретического анализа систем управления был создан Лапласом (1749) и Фурье (1758-1830).
|
|
|
Работы по проектированию усилителей с обратной связью в лаборатории Bell Telephone в 1930 году были основаны на концепциях частотных характеристик и математики комплексных чисел. Этот вопрос был рассмотрен Г. Найквистом (1932) в его статье «Обновление теории», в которой описывалась, каким образом определить устойчивость, используя методы, пригодные для частотной области. Такие методы были развиты Боде (1945), Никольсом, А.В. Михайловым (1938) и В.В. Солодовниковым (1939) в последующие 15 лет с целью создания еще одной из широко используемых инженерных методологий проектирования систем управления.
Другим важным подходом к проетированию систем управления явился метод Эванса (1948). Опираясь на работы Максвелла и Рауса, Эванс в своем методе корневого годографа, сформулировал правила и разаработал технологию, которая позволяет отабражать графически траектории корней характеристического уравнения.
Наступление эпохи цифровых компьютеров в 1950 годы дали толчок в представлении дифференциальных уравнений с помощью переменных состояния, используя для этой цели векторно-матричные обозначения, что позволяет легко осуществлять их численные решения. Идея оптимального проектирования была впервые рассмотрена А.Н. Колмогоровым (1941) и Н. Винером (1949). Метод динамического программирования был разработан Р.Беллманом (1957) и в то же время появился принцип максимума нашего соотечественника Л.С. Понтрягина (1962). На первом конгрессе Международной федерации автоматического управления (IFAC) Р. Калман (1960) ввел два дуальных понятия управляемости и наблюдаемости. Тогда же Р. Калман показал, что, если система дифференциальных уравнений является линейной и используется квадратичный критерий качества (линейно-квадратичное управление), то математически задача управления имеет явное решение, которое обеспечивает оптимальный закон управления. Также Калман и Бьюси (1961) высказали идею построения оптимального фильтра (фильтр Калмана), который, будучи соединен с оптимальным регулятором, порождает линейно-квадратичное гауссовское (ЛКГ) управление.
|
|
|
1980 годы ознаменовались большим прогрессом в теории управления применительно к проектированию робастных систем с неопределенностями в их динамических характеристиках. Работы Атанса (1971), Сафонова (1980), Гримбля (1988) и других показали, каким путем моделировать неопределенности, и раскрыли понятия H нормы и теории
нормы и теории  -синтеза систем управления.
-синтеза систем управления.
1990 годы представили инженерному и научному сообществу концепции интеллектуального управления. Интеллектуальная машина в соответствии с мнением Ржевского (1995) есть та, с помощью которой можно достигнуть цели построения системы с требуемым качеством в условиях неопределенности. Теория интеллектуального управления имеет много общего с идеями, играющими роль в области искусственного интеллекта (AI). Искусственные нейронные сети (ИНС), состоящие из множества простых элементов, работающих параллельно, пытаются эмулировать (имитировать) свойства их биологическх аналогов. Теория ИНС основана на работах Хебба (1949), Розенблатта (1961), Кохонена (1987), Уидроу-Хоффа (1960) и других. Понятие нечеткой логики было введено Заде (1965). Эта новая логика была разработана, чтобы позволить компьютерам моделировать неопределенности, присущие человеческой речи. Нечеткие логические контроллеры (регуляторы), пока не имеют формально строгой методологии проектирования, присущей другим технологиям, однако, они предлагают робастное управление без необходимости математического моделирования объектов управления. Работы в этой области включают труды Мамдани (1976), Сугено (1985), Саттона(1991) и других. Теория автоматического управления является фундаментальной дисциплиной инженерного образования, ее преподают во всех технических вузах России.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 420; Нарушение авторских прав?; Мы поможем в написании вашей работы!