КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
ПИД-регулятор
|
|
|
|
Вероятно самым распространенным видом для W2(p) является ПИД-регулятор или пропорционально-интегро-дифференциальный регулятор, который представляет собой комбинацию пропорционального П, интегрального И и дифференциального Д управлений:
 ,
,
где коэффициенты KP, KI и KD являются параметрами, подлежащими настройки для конкретного приложения. Во временной области ПИД-регулятор описывается уравнением
 .
.
На рисунке ниже показано действие ПИД-регулятора. В настоящий момент времени t пропорциональное управление зависит от мгновенного значения ошибки  и обеспечивает высокое быстродействие и уменьшает установившуюся ошибку. Интегральное управление базируется на интеграле от ошибки (затененная область)
и обеспечивает высокое быстродействие и уменьшает установившуюся ошибку. Интегральное управление базируется на интеграле от ошибки (затененная область)  , т.е. учитывает прошлое поведение ошибки, и повышает порядок астатизма системы по задающему воздействию и по возмущающему воздействию, приложенному как на вход, так и на выход ОУ. Часто даже при ОУ, включающем интеграторы, используется с целью обеспечить нулевую установившуюся ошибку при постоянных возмущениях
, т.е. учитывает прошлое поведение ошибки, и повышает порядок астатизма системы по задающему воздействию и по возмущающему воздействию, приложенному как на вход, так и на выход ОУ. Часто даже при ОУ, включающем интеграторы, используется с целью обеспечить нулевую установившуюся ошибку при постоянных возмущениях
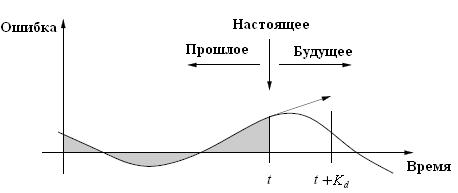
Интуитивное обоснование для применения дифференциального управления (управления по производной от ошибки  =
= ) состоит в том, что если видно, что управляемая величина системы y(t) изменяется с высокой скоростью, то можно значительно ускорить реакцию регулятора (управление) путем предсказания возможного отклонения этой управляемой величины, и оказать противодействие незамедлительно (если v(t)=const, то =-
) состоит в том, что если видно, что управляемая величина системы y(t) изменяется с высокой скоростью, то можно значительно ускорить реакцию регулятора (управление) путем предсказания возможного отклонения этой управляемой величины, и оказать противодействие незамедлительно (если v(t)=const, то =-  ). Коэффициент Kd приближенно равен промежутку времени, на который прогнозируется ошибка, т.к. (см. рис. выше) на основании формулы для ряда Тейлора
). Коэффициент Kd приближенно равен промежутку времени, на который прогнозируется ошибка, т.к. (см. рис. выше) на основании формулы для ряда Тейлора
 .
.
Например, при регулировании температуры в комнате, если температура начинает падать, можно увеличить подачу (расход) тепла еще до того как объект начнет остывать, чтобы противодействовать ожидаемому большому отклонению температуры, которое может произойти. Слово «ожидаемое» высвечивает трудности, возникающие при использовании управления по производной от ошибки. Сделать вывод о быстром изменении температуры можно только за счет применения датчика управляемой величины. Если шум датчика является значительным, случайные флюктуации могут повлечь за собой ложное изменение «скорости» управления и неадекватные сложившейся ситуации действия регулятора. Поэтому многие инженеры в области управления, пытаясь применить управление по производной, выясняют, что оно зашумляет систему (делает систему чувствительной к помехам), и отказываются от его применения. Т.к. управление по производной обладает рядом достоинств и в силу того, что ложной реакции на шум можно избежать за счет принятия некоторых мер, отказываться от его использования (управления по производной), по меньшей мере, неправильно.
Для того, чтобы лучше понять особенности Д - управления, мы напомним, что для дифференциальной составляющей с ПФ  (идеального дифференцирующего звена) АЧХ имеет вид
(идеального дифференцирующего звена) АЧХ имеет вид  . Линейная зависимость от
. Линейная зависимость от означает, что реакция регулятора возрастает с увеличением частоты входного сигнала. Это объясняет, почему высокочастотный шум датчика может создать большое управление. Очевидное решение - ограничить составляющую, обусловленную Д -управлением, добавив в закон управления низкочастотный фильтр с сопрягающей частотой
означает, что реакция регулятора возрастает с увеличением частоты входного сигнала. Это объясняет, почему высокочастотный шум датчика может создать большое управление. Очевидное решение - ограничить составляющую, обусловленную Д -управлением, добавив в закон управления низкочастотный фильтр с сопрягающей частотой  , чтобы получить ПФ
, чтобы получить ПФ
Практически ни одно исполнительное устройство не может реагировать на сигналы большой величины на произвольно высоких частотах, добавляем мы фильтр или нет. Однако, если выше, чем полоса пропускания системы, фильтр оказывает малое влияние на динамические свойства системы, в то же время ограничивает влияние шума датчика.
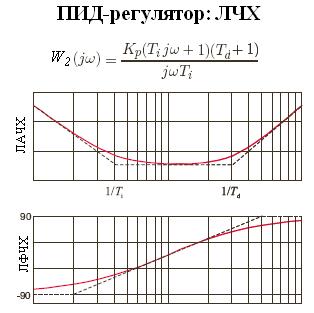
Рассмотрим ПФ и ЛЧХ различных модификаций ПИД-регулятора.
ПД-регулятор или пропорционально-дифференциальный регулятор.
Если KI=0, то ПФ ПИД-регулятора вырождается в ПФ ПД-регулятора
 .
.
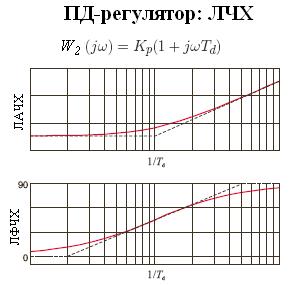
Д -управление: вносит положительный дополнительный фазовый сдвиг  повышает запасы устойчивости.
повышает запасы устойчивости.
ПИ-регулятор или пропорционально-интегральный регулятор.
Если KD=0, то ПФ ПИД-регулятора вырождается в ПФ ПИ-регулятора
 .
.
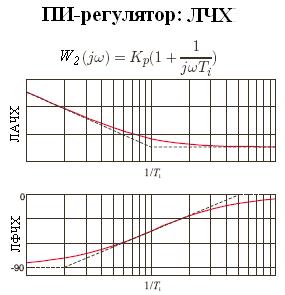
И -управление: увеличивает значения АЧХ в области низких частот повышает точность в установившемся режиме.
Реализация ПИД-регулятора:
1. Параллельная форма

2. Последовательная форма

Выбор параметров ПИД-регулятора:
1. Настраиваем K p так, чтобы получить требуемую частоту среза/ или установившуюся ошибку воспроизведения.
2. Если необходимо, используем Д -управление, чтобы повысить ФЧХ в окрестности частоты среза с целью увеличить запас устойчивости по фазе.
3. Если необходимо, используем И -управление, чтобы поднять АЧХ на низких частотах с целью добиться требуемой точности в установившемся режиме.
Однако примененение ПИД-регуляторов в общем случае ограничивается объектами второго порядка. Если объект управления имеет более высокий порядок, ПИД-регуляторы не всегда могут обеспечить удовлетворительное управление. Общий подход- выбор регулятора произвольной формы.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 2527; Нарушение авторских прав?; Мы поможем в написании вашей работы!