КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Выбор параметров П-регулятора по методу ЛЧХ
Формирование частотной характеристики разомкнутой системы
Лекция №29
Регуляторы, влияющие на величину коэффициента усиления разомкнутой системы, известны как пропорциональные или П-регуляторы. Такие регуляторы используются, чтобы обеспечить требуемое значение запаса устойчивости по фазе γ* в системе, которая в разомкнутом состоянии представляет собой последовательное соединение регулятор – объект управления. Заметим, что вид ЛФЧХ разомкнутой системы не может быть изменен с помощью такого регулятора.
Предположим, что основной показатель качества проектируемой системы – запас устойчивости по фазе γ*.
Пусть запас устойчивости нескорректированной системы γ1<γ*.
Требуется за счет П-регулятора добиться желаемого запаса устойчивости γ*.
ПФ П-регулятора описывается как
W2(p)=Kp = k2,
где k2 – КУ П-регулятора.
Как видим, П-регулятор является усилительным звеном. Отсюда ЛЧХ П-регулятора
L2(  )=20lg k2, φ2( )=0.
)=20lg k2, φ2( )=0.
Следовательно, ЛЧХ разомкнутой скорректированной системы
 ,
,
где L1( ) –ЛАЧХ нескорректированной системы,
φ1( ) – ЛФЧХ нескорректированной системы.
Роль неизвестного параметра q играет k2.
Надо найти k2, исходя из γ*.
Построим ЛЧХ нескорректированной системы L1 и φ=φ1. Так как γ1<γ*, то нескорректированная система не удовлетворяет требованиям, предъявляемым к ее колебательности.
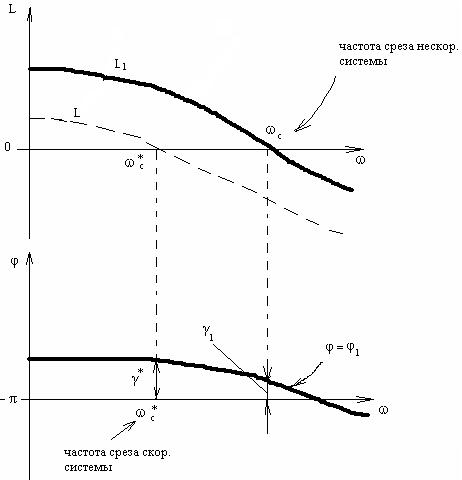
Заданному запасу γ* соответствует иная частота среза c*. Следовательно, k2 нужно выбрать таким образом, чтобы ЛАЧХ скорректированной системы пересекала ось частот при частоте c*. При этом коэффициент усиления скорректированной системы
k= k2 k1 < k1
будет меньше коэффициента усиления нескорректированной системы k1.
Чтобы спроектировать П-регулятор:
а) постройте логарифмические частотные характеристики (ЛАЧХ и ЛФЧХ) разомкнутой нескорректированной системы, т.е. характеристики
L1=20lg|W1(j )|, φ1( )=argW1(j );
б) найдите по φ1( ) частоту c*, при которой имеет место требуемый запас устойчивости
γ=180о+φ1( c*);
в) определите значение ЛАЧХ L1( c*)=20lg|W1(j c*)|, а затем и значение амплитудно-частотной характеристики |W1(j c*)|, соответствующие частоте c*;
г) установите коэффициента усиления П-регулятора равным
k2=1/|W1(j c*)|;
д) постройте ЛЧХ скорректированной системы с передаточной функцией k2W1(p) и оцените запас устойчивости по фазе. В случае необходимости сделайте небольшие изменения коэффициента усиления П-регулятора около значения k2, чтобы обеспечить требуемый запас устойчивости по фазе.
Недостатки и достоинства:
1. c*< c – уменьшается полоса пропускания, т.е. увеличивается длительность переходного процесса. Но есть и преимущество: повышается помехоустойчивость.
2. Понижается точность работы системы за счет уменьшения коэффициента усиления. Понижается значение ЛАЧХ в области низких частот.
Два распространенных корректирующих устройства, которые могут быть использованы для формирования частотной характеристики в ограниченном диапазоне частот, есть КУ с опережением по фазе и запаздыванием по фазе.
Коррекция системы с помощью опережения по фазе (реальный ПД-регулятор)
а) КУ с опережением по фазе
Его ПФ:
 .
.
Параметры КУ:
q1=T, q2=α, q3=k2, α < 1,
где 1/α – коэффициент опережения по фазе.
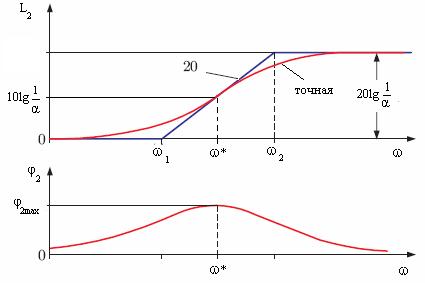
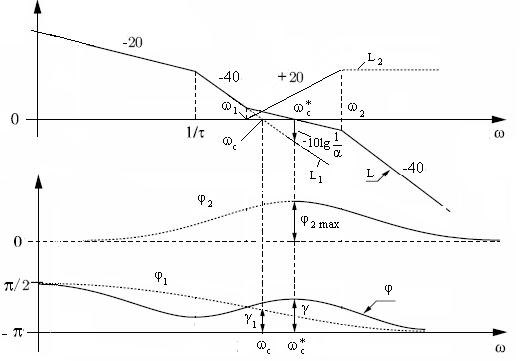
Построим ЛЧХ КУ (см. рис. ниже). Положим k2=1. Найдем сопрягающие частоты:
1=1/T, 2=1/αT. Т. к. α < 1, то 2> 1.
Так как
 ,
,
то  .
.
Выражение для ЛФЧХ
φ2( )=arctg T- arctgα T.
Известно, что
 .
.
Полагая x= T, y=α T, получаем
 .
.
Дифференцируя φ2( ) по , находим
 (*)
(*)
и максимум
 .
.
График зависимости  изображен на рисунке:
изображен на рисунке:
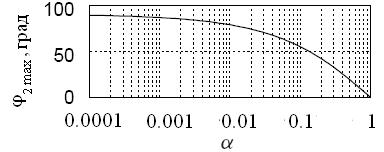
Можно показать, что
 .
.
Отсюда получаем аналитическое выражение
 . (**)
. (**)
Если α=0, то  - ПД-регулятор.
- ПД-регулятор.
Точные ЛЧХ КУ с опережением по фазе для k2= α изображены на рисунке ниже.
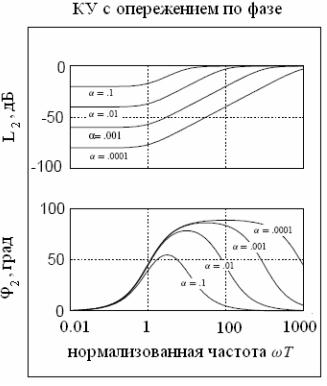
Необходимо выбрать α и Т так, чтобы система удовлетворяла заданным требованиям. При этом обычно пытаются расположить частоту  вблизи желаемой частоты среза таким образом, чтобы желаемая частота среза оказалась примерно посредине между частотами 1 и 2. Т.к. с уменьшением α увеличивается усиление на высоких частотах, что сопряжено с ослаблением помехоустойчивости (зашумленности управляющего воздействия), то приходится искать компромиссное решение между желанием добиться дополнительно большого значения фазового угла и неблагоприятной тенденцией получить большое усиление на высоких частотах (большое усиление шума измерения).
вблизи желаемой частоты среза таким образом, чтобы желаемая частота среза оказалась примерно посредине между частотами 1 и 2. Т.к. с уменьшением α увеличивается усиление на высоких частотах, что сопряжено с ослаблением помехоустойчивости (зашумленности управляющего воздействия), то приходится искать компромиссное решение между желанием добиться дополнительно большого значения фазового угла и неблагоприятной тенденцией получить большое усиление на высоких частотах (большое усиление шума измерения).
Так обычно пытаются взять  , что означает
, что означает
 .
.
Если требуется больший положительный сдвиг по фазе, то используют несколько последовательно включенных КУ с опережением по фазе.
б) Выбор параметров α и Т корректирующего устройства с опережением по фазе.
Пусть заданы требуемые значения коэффициента усиления k* и запаса устойчивости по фазе γ*.
Изменим коэффициент k1 нескорректированной системы так, чтобы коэффициент усиления скорректированной системы был равен требуемому значению k*, т.е., чтобы выполнялось условие: k=k*.
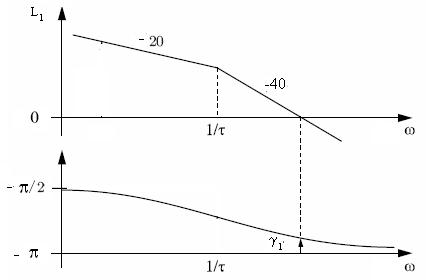
1. Построим ЛЧХ нескорректированной системы L1( ) и φ1 ( ) и определим запас устойчивости по фазе
γ1=1800+φ1( c),
где c – частота среза нескорректированной системы. Нескорректированная система при высоких значениях k1 оказывается неустойчивой или весьма колебательной, т.е. γ1 < γ* (см. рисунок ниже для  ).
).
2. Определим разность между γ1 и γ*
 .
.
3. Выбираем параметр α из условия
 ,
,
используя для этой цели формулу (**) для  или графическую зависимость
или графическую зависимость  .
.
4. Определяем частоту среза скорректированной системы c*, исходя из  .
.
5. Полагая *= c*, находим параметр  и сопрягающие частоты 1=1/T, 2=1/αT.
и сопрягающие частоты 1=1/T, 2=1/αT.
6. По формулам

строим ЛЧХ скорректированной системы и определяем, удовлетворяет ли система требованиям с точки зрения запаса устойчивости по фазе.
Действительно, если вычисления выполнены точно, то
 ,
,
и L( ) должна пересекать ось частот при = c*, так что c*= *.
Максимальный сдвиг по фазе  должен быть при c*. Если
должен быть при c*. Если  , то процесс синтеза заканчивается, если нет, то необходимо варьировать параметры.
, то процесс синтеза заканчивается, если нет, то необходимо варьировать параметры.
Достоинства:
1. КУ с опережением по фазе не затрагивает низкочастотного участка ЛАЧХ, т.е. не влияет на заданную точность работы системы в установившемся режиме.
2. Добились желаемого запаса устойчивости по фазе γ*, повышает запасы устойчивости.
3. c*> c, следовательно, увеличивается полоса пропускания (ПП) и увеличивается быстродействие.
Недостатки:
1. Увеличение полосы пропускания влечет за собой снижение помехоустойчивости.
2. Увеличение быстродействия связано с увеличением управляющего воздействия u(t), что может повлечь за собой выход системы из строя или заставить работать систему в нелинейном режиме. Поскольку при синтезе все элементы предполагались линейными, то влияние нелинейностей в рамках линейной теории оценить невозможно.
Процесс проектирования слегка упрощается, если мы ставим задачу спроектировать КУ с опережением по фазе при заданной частоте среза c* и заданном запасе устойчивости γ*:
1. Определяем требуемое значение
 ;
;
2. Находим
;
3. Находим параметр и частоты 1=1/T, 2=1/αT;
5. Выбираем коэффициент усиления k2 так, чтобы ЛАЧХ скорректированной системы пересекла ось частот при частоте c*.
Техническая реализация КУ с опережением по фазе
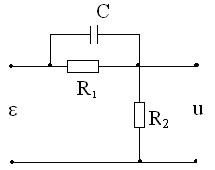
 ,
,
где
 .
.
Коэффициент усиления нескорректированной системы надо увеличить в 1/α, чтобы включение цепи не повлекло за собой уменьшение коэффициента усиления системы.
|
Дата добавления: 2014-01-07; Просмотров: 1071; Нарушение авторских прав?; Мы поможем в написании вашей работы!