КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Дифференциальные уравнения движения механической системы
|
|
|
|
Лекция IV-Д-2
ГЛАВА VII. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ МЕХАНИЧЕСКОЙ СИСТЕМЫ. ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА MAСС МЕХАНИЧЕСКОЙ СИСТЕМЫ
Рассмотрим систему материальных точек М1, М2…,Мk…,Мn. Массу каждой точки обозначим  и в каждую точку проведем из начала координат радиус-вектор
и в каждую точку проведем из начала координат радиус-вектор .
.
Приложенные к точкам силы разделим на внешние и внутренние и второе деление на заданные (активные) силы и реакции связей. 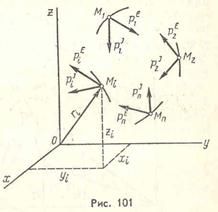 Основное уравнение динамики материальной точки, как известно, выражено уравнением
Основное уравнение динамики материальной точки, как известно, выражено уравнением  . Дифференциальные уравнения движения произвольных точек несвободной механической системы согласно этих двух способов деления сил можно записать в двух формах:
. Дифференциальные уравнения движения произвольных точек несвободной механической системы согласно этих двух способов деления сил можно записать в двух формах:
(1) 
 , где k=1, 2, 3, …, n – количество точек материальной системы.
, где k=1, 2, 3, …, n – количество точек материальной системы.
(2)  , где
, где  - масса k-той точки;
- масса k-той точки;  - радиус вектор k-той точки,
- радиус вектор k-той точки,  - заданная (активная) сила, действующая на k-тую точку или равнодействующая всех активных сил, действующих на k-тую точку.
- заданная (активная) сила, действующая на k-тую точку или равнодействующая всех активных сил, действующих на k-тую точку.  - равнодействующая сил реакций связей, действующая на k-тую точку;
- равнодействующая сил реакций связей, действующая на k-тую точку;  - равнодействующая внутренних сил, действующая на k-тую точку;
- равнодействующая внутренних сил, действующая на k-тую точку;  - равнодействующая внешних сил, действующая на k-тую точку.
- равнодействующая внешних сил, действующая на k-тую точку.
При помощи уравнений (1) и (2) можно стремиться решать как первую, так и вторую задачи динамики. Однако решение второй задачи динамики для системы очень усложняется не только с математической точки зрения, но и потому, что мы сталкиваемся с принципиальными трудностями. Они заключаются в том, что как для системы (1), так и для системы (2) число уравнений значительно меньше числа неизвестных.
Так, если использовать (1), то известными для второй (обратной) задачи динамики будут и , а неизвестными будут и . Для механической системы, имеющей n точек, получим 3n совместных дифференциальных уравнений движения.
|
|
|
Так как внутренние силы, приложенные к точкам системы, в большинстве случаев остаются неизвестными, а число точек системы обычно велико, то эти 3n уравнений могут быть проинтегрированы лишь в исключительных случаях.
Если же исходить из системы уравнений (2), то известные и часть внешних сил . Почему часть? Дело в том, что в число внешних сил входят и внешние реакции связей, которые неизвестны. К тому же неизвестными будут ещё и .
Таким образом, как система (1), так и система (2) НЕЗАМКНУТА. Нужно добавлять уравнения, учитывая уравнения связей и возможно ещё нужно накладывать некоторые ограничения на сами связи. Что делать?
Если исходить из (1), то можно пойти по пути составления уравнений Лагранжа первого рода. Но такой путь не рационален потому, что чем проще задача (меньше степеней свободы), тем труднее с точки зрения математики ее решать.
Тогда обратим внимание на систему (2), где - всегда неизвестны. Первый шаг при решении системы – это нужно исключить эти неизвестные. Следует иметь в виду, что нас, как правило, не интересуют внутренние силы при движении системы, то есть при движении системы не нужно знать, как движется каждая точка системы, а достаточно знать как движется система в целом.
Таким образом, если различными способами исключить из системы (2) неизвестные силы , то получаем некоторые соотношения, т. е. появляются некоторые общие характеристики для системы, знание которых позволяют судить о том, как движется система в общем. Эти характеристики вводятся при помощи так называемых общих теорем динамики. Таких теорем четыре:
1. Теорема о движении центра масс механической системы;
2. Теорема об изменении количества движения механической системы;
3. Теорема об изменении кинетического момента механической системы;
4. Теорема об изменении кинетической энергии механической системы.
|
|
|
Рассмотрим пути получения этих четырёх общих теорем динамики механической системы:
1. Теорема о движении центра масс механической системы:
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 2762; Нарушение авторских прав?; Мы поможем в написании вашей работы!