КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Малые свободные колебания системы с одной степенью свободы
|
|
|
|
Допустим, что консервативная механическая система, состоящая из n материальных точек и имеющая одну степень свободы, находится в некотором положении в устойчивом равновесии. Исследуем, Какое движение будет совершать эта система, если ее вывести из равновесия малым возмущением. Условимся опять определять положение системы обобщенной координатой q, выбранной так, что при равновесии q = 0. Так как равновесие устойчиво, а возмущения малы, то координата q и обобщенная скорость q будут во все время движения тоже оставаться величинами малыми. Для составления дифференциального уравнения движения системы воспользуемся уравнением Лагранжа, которое, если выразить обобщенную силу Q через потенциальную энергию системы, П примет вид:
 (2)
(2)
Вообще это уравнение будет нелинейным, но его можно линеаризировать и тем самым существенно упростить, сохранив в уравнении малые величины q и q только в первой. Для этого значения T(q, q*) и П (q) достаточно определить тоже приближенно. При этом, так как в уравнение (2) входят первые производные от П и Т no q a q, то, чтобы сохранить в нем q и q в первой степени, надо Т и П определить с точностью до малых величин второго порядка малости, т. е. с точностью до q2 или q1.
Найдем сначала приближенное выражение T(q, q). Для любой точки системы при стационарных связях:

Тогда, вынося общий множитель q2 за скобки, получим

так как производные как и сами
как и сами являются функциямитолько q. Разложив F(q) в ряд Тейлора, получим
являются функциямитолько q. Разложив F(q) в ряд Тейлора, получим
Так как Т надо определить с точностью до q2, то в этом разложении следует сохранить только первое постоянное слагаемое F(0). Тогда для Т получим выражение
 (3)
(3)
Поскольку Т величина существенно положительная, то постоянный коэффициент а > 0; его называют инерционным коэффициентом. Размерность а зависит от размерности в частности, а может иметь размерность массы или момента инерции.
в частности, а может иметь размерность массы или момента инерции.
|
|
|
Далее, разлагая П (q) в ряд Тейлора и учитывая, что в положении равновесия (∂П / ∂ q)0 = 0, найдем (с точностью до q 2)
 (4)
(4)
При этом по условиям (1) с > 0. В частном случае, если q — удлинение пружины, равенство (4) выражает потенциальную энергию ноля сил упругости; поэтому коэффициент с называют квазиупругим коэффициентом (или обобщенным коэффициентом жесткости). Из равенств (3) и (4) находим:

Подставляя эти величины в уравнение (2), получим следующее дифференциальное уравнение малых свободных колебаний системы с одной степенью свободы:
 (5)
(5)
Это уравнение совпадает с известным уравнением свободных прямолинейных колебаний материальной точки (см. § 94) и его общее. решение имеет вид
 (6)
(6)
где А и а — постоянные интегрирования, определяемые по начальным условиям. Частота и период этих колебаний согласно (5) определяются равенствами:
 (7)
(7)
Установим, как при этом движутся точки системы. Разлагая радиус-вектор  одной из точек системы в ряд Тейлора, получим
одной из точек системы в ряд Тейлора, получим

Заменяя здесь q его значением (6), найдем, что с точностью до величин первого порядка малости
 (8)
(8)
Таким образом, точки системы тоже совершают малые колебания с частотой k и амплитудами  . Из найденных результатов вытекают следующие свойства малых колебаний системы:
. Из найденных результатов вытекают следующие свойства малых колебаний системы:
1) свободные (собственные) колебания системы являются колебаниями гармоническими; частота и период этих колебаний не зависят от начальных условий и определяются равенствами (7);
2) так как постоянные A и a зависят от начальных условий, то амплитуды колебаний точек системы, равные  и начальная фаза а тоже зависят от начальных условий;
и начальная фаза а тоже зависят от начальных условий;
3) отношения амплитуд колебаний разных точек системы от начальных условий не зависят, так как определяются только значениями  т. е. конфигурацией системы;
т. е. конфигурацией системы;
|
|
|
4) все точки системы в каждый момент времени, как видно из равенств (8), находятся в одной и той же фазе (kt+a) и, следовательно, одновременно проходят через положения равновесия и одновременно достигают максимальных отклонений от этого положения.
При решении задач наибольший интерес представляет определение частоты k и периода т собственных колебаний системы, что существенно, например, для установления условий наличия или отсутствия резонанса. При этом достаточно определить из равенств (3) и (4) коэффициенты а и с и воспользоваться формулами (7).
Задача 2.
Определить частоту и период малых колебаний механической системы, рассмотренной в задаче 1.
Решение.
В задаче 1 кинетическая энергия системы (стержня AD, см. рис.
1) будет T=0,5 JA φ2. Следовательно, в этой задаче F (q) = f (φ)= JA = const и
a = JA= m l2 / 3. (a)
Далее, согласно формуле (4) и соотношениям (б) и (в), полученным в задаче 1,

Следовательно, по формулам (136)

Задача3.
Механическая система состоит из весомых стержней 1, 2 и диска 3, имеющих оси вращения в точках О 1 , О 2, О 3 соответственно и связанных друг с другом невесомыми стержнями АВ DЕ (в точках А, В, D, Е шарниры). В положении, показанном на рис. 2, система находится в равновесии; при этом стержень 1 вертикален (прикрепленная к его концу А горизонтальная пружина имеет удлинение λст), а стержень 2 — горизонтален (прикрепленная к его концу D вертикальная пружина не деформирована). Длины стержней равны l 1 и l 2, массы — m1 и m2, масса диска — m3 , коэффициенты жесткости пружин — c1 и с2.
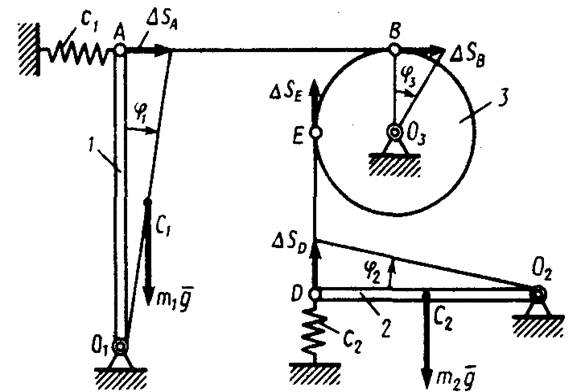
Рис. 2.
Определить:
1) значение λст;
2) условие устойчивости равновесия системы;
3) частоту и период ее собственных колебаний,
Решение.
Выберем в качестве обобщенной координаты системы малый угол (φ1 отклонения стержня 1 от равновесного положения. При таком отклонении, очевидно, ΔsA = ΔsB = ΔsE = ΔsD. Следовательно, l 2 φ2 = l 1 φ1 и l 3 φ3 = l 1 φ1 где r 3— радиус диска. Кроме того, удлинение горизонтальной пружины
λ1 = λст + ΔsA = λст + l 1 φ1, а удлинение вертикальной пружины
λ2 = ΔsD = l 2 φ2 = l 1 φ1. Тогда для потенциальной энергии системы, получим значение:

или, полагая

и учитывая, что

(все постоянные величины включены в П0). Отсюда находим
|
|
|

В положении равновесия, т. е. при φ1 = 0, эта производная должна равняться нулю. Следовательно, должно быть

или

Таким образом, в положении равновесия пружина сжата на эту величину. Далее получим
Тогда, согласно условиям (1), заключаем, что равновесие будет устойчивым, если

Кроме того, из равенства (133) следует, что квазиупругий коэффициент

Для кинетической энергии системы получим значение

 — моменты инерции тел 1, 2, 3 относительно их осей вращения;
— моменты инерции тел 1, 2, 3 относительно их осей вращения;
 — угловые скорости этих тел. Но из найденных выше зависимостей между φ1, φ2 , и φ13, Ф. следует, что
— угловые скорости этих тел. Но из найденных выше зависимостей между φ1, φ2 , и φ13, Ф. следует, что

Тогда, учтя еще равенство (3), получим:

При найденных значениях с и а формулы (7) дают:

|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 907; Нарушение авторских прав?; Мы поможем в написании вашей работы!