КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Линейная коррекция нелинейных систем
|
|
|
|
КОРРЕКЦИЯ НЕЛИНЕЙНЫХ СИСТЕМ УПРАВЛЕНИЯ
Для достижения требуемой точности и качества процесса в нелинейные системы можно вводить линейные корректирующие устройства такие же, как и в линейных системах. Эти линейные корректирующие устройства могут быть последовательными (с введением производных, интегралов и т. п.) и параллельными (в виде местных обратных связей различного типа).
Рассмотрим системы с одной нечетно-симметричной однозначной нелинейностью F(x), гармоническая линеаризация которой имеет вид
 (17.1)
(17.1)
где  коэффициент гармонической линеаризации принимает ограниченные значения
коэффициент гармонической линеаризации принимает ограниченные значения
 или
или  (17.2)
(17.2)
К такого типа нелинейностям относятся, например, нелинейности, изображенные на рисунке 17.1.
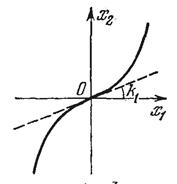
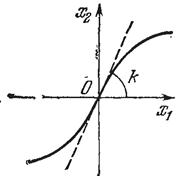
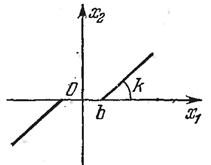
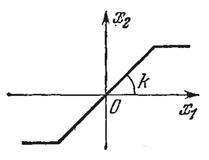
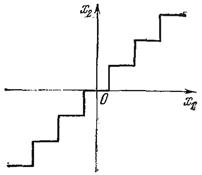
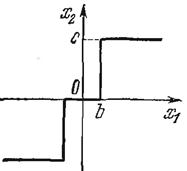
Рисунок 17.1. Нелинейности с ограниченным коэффициентом гармонической линеаризации
Случаи наличия нелинейностей вида (рис.17.2) когда коэффициент принимает бесконечное значение при  , здесь не рассматриваются, так как в этих случаях невозможно обеспечить устойчивое равновесное состояние системы в нулевой точке и установившийся режим будет автоколебательным. В этих случаях путем введения линейных корректирующих устройств можно добиваться приемлемых значений параметров
, здесь не рассматриваются, так как в этих случаях невозможно обеспечить устойчивое равновесное состояние системы в нулевой точке и установившийся режим будет автоколебательным. В этих случаях путем введения линейных корректирующих устройств можно добиваться приемлемых значений параметров  автоколебаний.
автоколебаний.
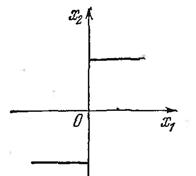
Рисунок 17.2 Нелинейности с неограниченным коэффициентом гармонической линеаризации
Здесь мы будем рассматривать точность и качество процессов около устойчивого равновесного состояния в нулевой точке.
Пусть схема системы имеет вид, изображенный на рис. 17.3.
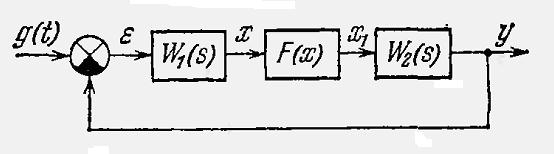
Рисунок 17.3. Структура нелинейной системы
Положим, что линейное корректирующее устройство любого типа вводится в одну из линейных частей, т. е. в блок  или
или  , не охватывая нелинейного звена F(x). Формулу гармонической линеаризации (17.1) будем записывать
, не охватывая нелинейного звена F(x). Формулу гармонической линеаризации (17.1) будем записывать
|
|
|
 (17.3)
(17.3)
где  ‑ коэффициент усиления (его определение для различных нелинейностей показано на рис.). Выражение
‑ коэффициент усиления (его определение для различных нелинейностей показано на рис.). Выражение  получают для каждой нелинейности используя метод гармонической линеаризации в виде
получают для каждой нелинейности используя метод гармонической линеаризации в виде
Указанный в формуле (17.3) коэффициент будем относить к передаточной функции линейной части системы. Так, для схемы, приведенной выше передаточную функцию такой приведенной линейной части будем записывать в виде
 (17.4)
(17.4)
где ‑ коэффициент, выделенный из нелинейности согласно (17.3).
Соответственно в случае релейной характеристики (трехпозиционное реле) в качестве величины примем значение  , т.е.
, т.е.
 (17.5)
(17.5)
В этом случае, получим
 (17.6)
(17.6)
Величину будем называть нормированным коэффициентом гармонической линеаризации. Тогда синтез корректирующего устройства можно производить следующим образом.
1. Строится логарифмическая амплитудная частотная характеристика первоначально заданной приведенной линейной части системы:
,
где ‑ коэффициент усиления, перенесенный из нелинейности.
2. Формируется желаемая логарифмическая амплитудная частотная характеристика линейной части  в соответствии с требованиями точности и качества процессов, как это изложено в теории линейных систем.
в соответствии с требованиями точности и качества процессов, как это изложено в теории линейных систем.
3. Выполняется синтез линейного корректирующего устройства также методом линейной теории.
4. Строится логарифмическая фазовая частотная характеристика полученной скорректированной линейной части системы.
В дополнение ко всем этим операциям, выполняемым по линейной теории, добавляется еще один пункт, учитывающий нелинейность F(x) в нормированном виде.
5. Для данной нелинейности с использованием нормированного коэффициента строится «запретная» зона, соответствующая желаемому показателю колебательности М. Внутрь этой зоны не должна заходить фазовая частотная характеристика скорректированной линейной части системы. Та кривая М = const, которой касается полученная фазовая характеристика, определяет значение показателя колебательности данной скорректированной системы. Если необходимо его уменьшить, то нужно несколько изменить параметры полученного выше линейного корректирующего устройства, следя за тем, чтобы не допускать существенного искажения желаемых свойств логарифмической амплитудной частотной характеристики приведенной линейной части, положенных первоначально в основу расчета.
|
|
|
Этот пятый пункт процедуры синтеза в совокупности с предыдущими обеспечивает нужные качества процессов в замкнутой нелинейной системе в целом. Следовательно, прежде чем приступать к синтезу линейного корректирующего устройства в нелинейной системе, необходимо научиться строить запретную зону по показателю колебательности при заданной нелинейности. Такое построение может производиться методом гармонической линеаризации, поскольку речь идет о колебательных переходных процессах.
Рассмотрим методику этого построения. Ограничиваясь рассмотрением однозначных нелинейностей (17.1) с ограниченными значениями коэффициента гармонической линеаризации (17.2) и используя его нормирование (17.3), получим следующее выражение для передаточной функции разомкнутой цепи гармонически линеаризованной системы:
 .
.
Передаточная функция замкнутой системы примет вид
 .
.
Выделим вещественные и мнимые части после замены  , обозначив их следующим образом:
, обозначив их следующим образом:
 .
.
Тогда для показателя колебательности  имеем выражение
имеем выражение
Отсюда после преобразования получаем уравнение линий равных значений М на комплексной плоскости (Р, Q) в виде
 , (17.7)
, (17.7)
где
 ,
,  (17.8)
(17.8)
При определенном значении  линии М = сonst получают вид окружностей. Но согласно (17.2) и (17.3) величина может принимать любое значение в интервале
линии М = сonst получают вид окружностей. Но согласно (17.2) и (17.3) величина может принимать любое значение в интервале
 или
или  (17.9)
(17.9)
где числа  и
и  получают свои определенные значения для каждой конкретной нелинейности. В соответствии с этим, согласно (17.8), координата центра окружности
получают свои определенные значения для каждой конкретной нелинейности. В соответствии с этим, согласно (17.8), координата центра окружности  и радиус
и радиус  будут тоже меняться в определенных для каждой нелинейности пределах. Следовательно, каждая линия М = const будет определяться как огибающая непрерывного множества постепенно меняющихся окружностей. При этом в случае первого неравенства (17.9) линия М = const будет незамкнутой (рис. 17.4, а), так как в начальной точке
будут тоже меняться в определенных для каждой нелинейности пределах. Следовательно, каждая линия М = const будет определяться как огибающая непрерывного множества постепенно меняющихся окружностей. При этом в случае первого неравенства (17.9) линия М = const будет незамкнутой (рис. 17.4, а), так как в начальной точке  из (17.8) имеем
из (17.8) имеем  ,
,  . Показанные на рис.17.4, а величины
. Показанные на рис.17.4, а величины  и
и  , согласно (17.8), определяются выражениями
, согласно (17.8), определяются выражениями
|
|
|
 ,
,  (17.10)
(17.10)
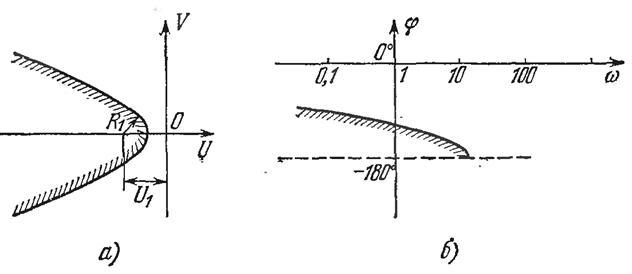
Рисунок 17.4. Построение незамкнутых запретных зон
В случае второго неравенства (17.9) линия М = const будет замкнутой (рис.17.5, а), причем
 ,
,  (17.11)
(17.11)
а значения  и прежние.
и прежние.
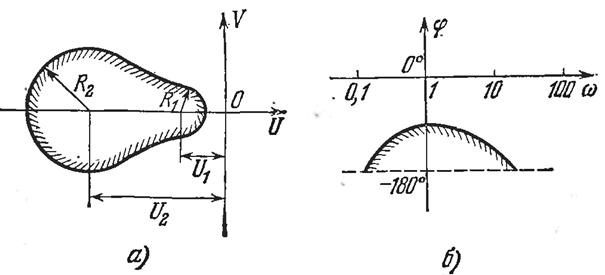
Рисунок 17.5. Построение замкнутых запретных зон
Поскольку синтез линейного корректирующего устройства проводится по логарифмическим частотным характеристикам, то изображенные на рис. 17.4, а и рис. 17.5, а линии М = const (запретные зоны) должны быть перенесены в систему координат логарифмических характеристик (методика приведена в конце данного подраздела (рис.17.9-рис.17.11)). Это показано соответственно на рис. 17.4, б и рис. 17.5, б.
Взяв разные постоянные значения М (М1 М2, М3,...), получим серию кривых М = const (рис. 17.6).
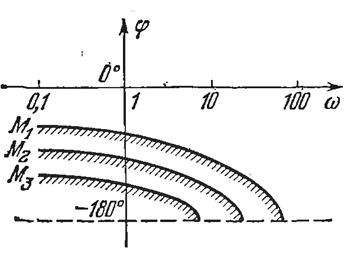
Рисунок 17.6.
Логарифмические частотные характеристики скорректированной по изложенной выше процедуре системы должны быть такими, чтобы фазовая характеристика линейной части  не заходила внутрь запретной зоны, определяемой допустимым значением показателя колебательности М (рис.17.7).
не заходила внутрь запретной зоны, определяемой допустимым значением показателя колебательности М (рис.17.7).
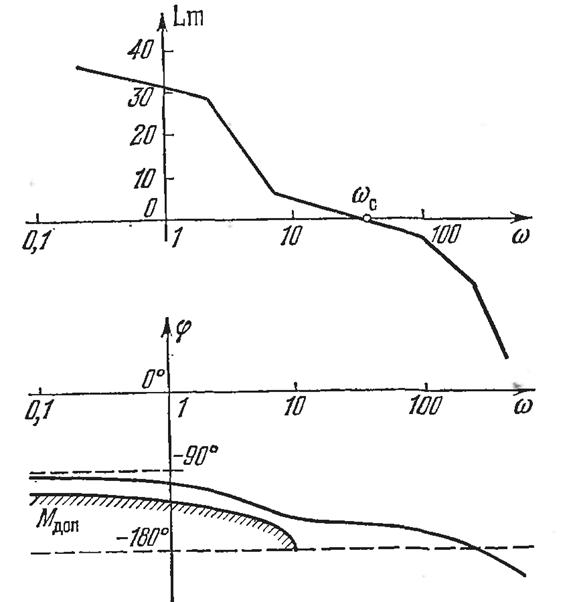
Рисунок 17.7. ЛАЧХ и ЛФЧХ скорректированной САУ
Если расчет корректирующего устройства ведется по амплитудно-фазовым частотным характеристикам, то на поле координат (Р, Q) получается серия кривых М = const (рис.17.8, а), причем амплитудно-фазовая частотная характеристика приведенной линейной части скорректированной системы не должна заходить внутрь запретной зоны, определяемой здесь допустимым значением показателя колебательности М (рис.17.8, б).
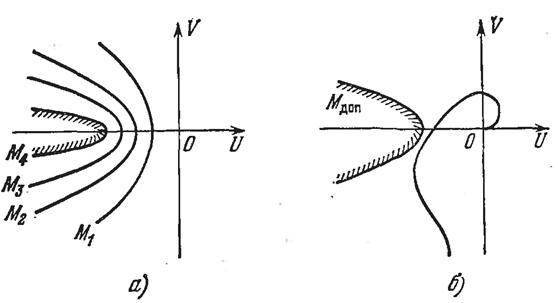
Рисунок 17.8
Необходимым и достаточным условием того, чтобы в устойчивой системе показатель колебательности был не больше заданного, является нахождение амплитудно-фазовой характеристики АФЧХ разомкнутой системы вне запретной области (рис.17.9), представляющей собой окружность. Радиус этой окружности равен использоваться

а смещение центра влево относительно начала координат
|
|
|

Для оценки запаса устойчивости замкнутой системы по этой методике в непрерывном случае должна использоваться частотная передаточная функция разомкнутой системы  .
.
Условие того, чтобы АФЧХ разомкнутой системы не заходила в запретную область

По полученному выражению для  можно определить требуемый запас по фазе в функции модуля, выраженного в децибелах, для различных значений показателя колебательности М. Эти зависимости построены на рис. 17.10.
можно определить требуемый запас по фазе в функции модуля, выраженного в децибелах, для различных значений показателя колебательности М. Эти зависимости построены на рис. 17.10.
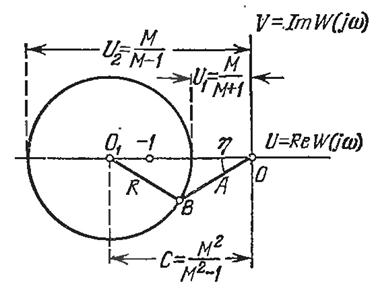
Рисунок 17.9. Запретная область для АФЧХ разомкнутой системы.
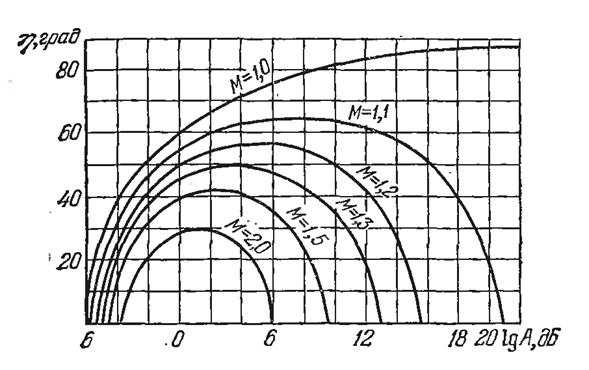
Рисунок 17.10. Зависимость требуемого запаса по фазе от модуля в децибелах.
Использование кривых (рис.17.10) может заключаться в том, что для построенной ЛАЧХ разомкнутой системы по точкам находится и строится требуемый запас по фазе (рис.17.11), который откладывается от оси нуля децибел вниз. Построение ведется в пределах изменения модуля

и образует запретную область для логарифмической фазовой характеристики . Требуемый запас устойчивости будет обеспечен, если ЛФЧХ не заходит в запретную область, определяемую заданным показателем колебательности (рис.17.11).
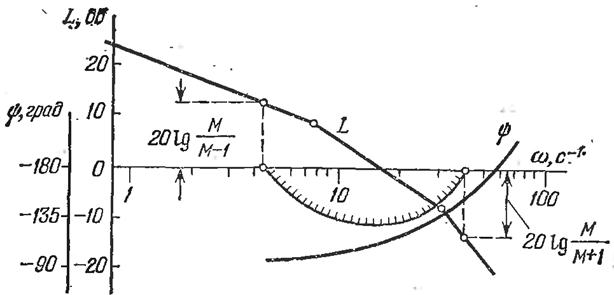
Рисунок 17.11. Запретная область для ЛФЧХ
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 1235; Нарушение авторских прав?; Мы поможем в написании вашей работы!