КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Дерева виведення
|
|
|
|
План
Розглянемо вимірювання положення кінців і швидкості прокатуваної смуги з проміжним перетворенням в кутове переміщення і кутову швидкість робочих валків, а також комбіноване вимірювання цих показників.
Відомо, це координата х переднього кінця прокатуваної смуги і кутове переміщення валка з моменту входу смуги в кліть Δφ зв'язані співвідношенням
х=RΔφ,
де R- катаючий радіус валка.
Використовуючи цей вираз, вимірювання координати переднього кінця прокатуваної смуги з проміжним перетворенням здійснюють на основі перетворювача кутового положення робочого валка і реле наявності смуги в кліті. Значення катаючого радіусу попереднє визначається розрахунковим шляхом або експериментально.
Для комбінованого вимірювання координати переднього кінця прокатуваної смуги х використовують робочий валок, перетворювач кутового переміщення робочого валка ППВ і кодовий перетворювач положення переднього кінця смуги ППП (мал. 6).
|
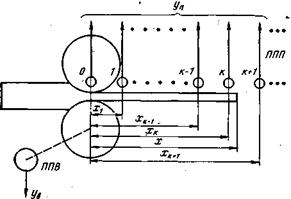
Вихідний сигнал уn перетворювача положення смуги ППП відображує дискретне значення координати переднього кінця смуги хk, k=0, 1... (х0=0), а також забезпечує фіксацію моментів tk проходження переднім кінцем смуги перетинів з координатами x=хk, k=0, 1.... Вихідний сигнал ув перетворювача положення валка ППВ починає вироблятися у момент входу смуги в кліть і відображає кутове переміщення валка Δφ за відповідний період часу. Використовуючи ці сигнали, можна визначити поточне значення координати х на підставі виразів (хk ≤х< хk+1; k=0, 1,…; m=l, 2,...)
х = xk + Rk (Δφ — Δφk), Rm= (хт — хт-1) /(Δφ m— Δφm-1), (1)
|
|
|
де Rm - середнє значення катаючого радіусу на інтервалі часу tm-1≤t< tm;
Δφ k - значення величини Δφ у момент часу tk (Δφ 0=0).
Початкове значення катаючого радіусу R0, як і при вимірюванні з проміжним перетворенням, заздалегідь визначається розрахунковим шляхом або експериментально.
Як видно з виразу (1), значення координати х в інтервалі 0≤х<х1 визначається з використанням початкового значення катаючого радіусу R0, а при визначенні значення х в інтервалі хт-1≤х<хт+1 в якості значення катаючого радіусу використовується його середнє значення Rm для попереднього інтервалу xm-1≤ x<хm. В результаті комбіноване вимірювання координати переднього кінця прокатуваної смуги порівняно з вимірюванням з проміжним перетворенням має меншу погрішність за рахунок зменшення її складових, обумовлених погрішністю попереднього визначення значення катаючого радіусу і його зміною в процесі плющення.
Як значення R0 для чергової прокатуваної смуги можна використовувати значення R1, визначене при плющенні попередньої смуги.
Якщо катаючий радіус може істотно змінюватися від смуги до смуги, а його зміни під час прокатки окремих смуг неістотні, то замість перетворювача положення смуги досить використовувати два реле наявності смуги, встановлені в перетинах з координатами х0=0 і х1.
Вимірювання швидкості виходу прокатуваної смуги з кліті (швидкості плющення) v1 з проміжним перетворенням здійснюють, вимірюючи кутову швидкість робочого валка ωв з використанням перетворювача кутової швидкості валка і визначаючи швидкість плющення на підставі виразу
v1=R ωв. Для комбінованого вимірювання швидкості плющення перетворювачі, використовувані для комбінованого вимірювання координати переднього кінця смуги, доповнюють перетворювачем кутової швидкості валка. При цьому значення швидкості плющення в інтервалі часу tk≤t<tk+1 визначається на підставі виразу (k=0, 1...) v1=Rkωв.
|
|
|
Вимірювання координати заднього кінця прокатаної смуги і швидкості її входу в кліть принципово не відрізняється від вимірювання координати переднього кінця смуги і швидкості плющення.
Розглянемо вимірювання кінематичних показників прокату з використанням вимірювальних роликів і петлеутримувачів.
Вимірювальний ролик представляє ролик відомого діаметру, що знаходиться у контакті із смугою і приводиться нею в обертання за рахунок контактних сил тертя. Вимірювальний ролик може розглядатися як холостий робочий валок, що здійснює плющення смуги з нульовим обтисканням. Відповідно, вимірювання з проміжним перетворенням і комбіноване вимірювання координат і швидкостей прокатаних і транспортованих смуг за допомогою вимірювального ролика може розглядатися як вимірювання за допомогою робочого валка з катаючим радіусом, рівним радіусу ролика. Комбіноване вимірювання порівняно з вимірюванням з проміжним перетворенням дозволяє зменшити погрішність вимірювання за рахунок зменшення її складових, обумовлених зміною радіусу вимірювального ролика і відносним прослизанням ролика і смуги.
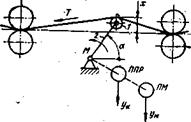
Петлеутримувач (мал. 7) складається з ролика 1, важеля 2 і приводу (привід на малюнку умовно не показаний). Під дією моменту М, що розвивається приводом, важіль 2 притискує ролик 1 до смуги. Петлеутримувач перетворить прогин смуги між клітями х в кутову координату важеля α, яка відобразиться сигналом уα перетворювача кутового положення важеля петлеутримувача ППР.
|
1. Поняття мови, основні складові
2.Формальні породжувальня граматики
4. Нормальні алгоритми Маркова.
1. Буква (або символ) – це простий неподільний знак; множина букв утворює алфавіт V. Алфавіти є множинами, і тому до них можна застосувати теоретико-множинні позначення.
Ланцюжки (string) над алфавітом V - це впорядковані сукупності букв алфавіту V, отже, вони виглядають як елементи. Букви є ланцюжком у разі n=1. Будемо допускати випадок, коли ланцюжок не містить букв (порожній ланцюжок), і позначатимемо такий ланцюжок через. Зазначимо, що не є символом, тобто для будь-якого алфавіту V.
|
|
|
За аналогією з лінгвістикою ланцюжки іноді називають словами. Множину всіх ланцюжків над алфавітом V називають замиканням V і називають
, так що
де
Головну операцію над ланцюжками називають конкатенцією.
Нехай та -ланцюжки над алфавітом V.
Конкатенцією та називають ланцюжок.
Якщо ланцюжок складається з символів, що повторюються, то використовуючи скорочені позначення: для a є V і цілого невід’ємного n записують:
Множину ланцюжків (або речень) називають мовою.
Формально мова над алфавітом V-це множина ланцюжків у,тому.
Правила, які визначають множину речень, утворюють синтаксис мови, опис множини смислів і відповідності між реченнями і смислами – семантику мови.
Семантика мови залежить від характеру об’єктів, які описує мова, і засоби її вивчення для різних типів мов різні. Семантика мови математики –формальні теорії. Дослідження семантики мов програмування стало самостійно частиною теоретичного програмування.
Спроби точного опису семантики природних мов стосується, передусім, робіт з машинного перекладу.
Найбільших успіхів математична лінгвістика досягла у вивчені синтаксису, де за останні 50 років розвинувся спеціальний математичний апарат-теорія формальних породжувальних граматик.
Ця теорія дуже важлива теоретично й ефективна у застосуваннях (мови програмування, штучний інтелект, машинний переклад).
Ми розглянемо головні поняття теорії формальних граматик і пов'язаний зв'язок між граматиками й автоматами.
2. У лінгвістиці природних мов терміни ”речення” й “слово” мають різний смисл; тому в математичній лінгвістиці послідовність символів звичайно називають нейтральним терміном, “ ланцюжок”, а мову яку розрізняють як множину формальних ланцюжків - формальною мовою.
Означення:
Формальна породжувальна граматика G( грамматика G)-це формальна система, визначена четвіркою об’єктів G=(V,T,S,P),де V-скінченна не порожня множина, яку називають алфавітом (або словником); Т-її підмножина елементи множини Т називають термінальним(основними) символами;
|
|
|
S- початковий символ (SєV), Р-скінченна множинна продукцій (або правил перетворення) вигляду та ланцюжок в алфавіті V.
Множину V\T позначають N, її елементи називають не термінальними (допоміжними)символами.
Символи термінального алфавіту прийнято позначати малими латинськими буквами або цифрами, символи не термінального алфавіту-великими латинськими буквами, ланцюжок в алфавіті V-грецькими буквами. Довжину ланцюжка позначають або.
Нехай G=(V,T,S,P)- граматика, і нехай (конкатеція), та -ланцюжок над V.
Якщо є продукцією граматики G, то кажуть, що безпосередньо виводиться з, і дописують.
Якщо -ланцюжки над V такі, що
то кажуть, що породжує, та використовують запис
Послідовність кроків для отримання з називають виведенням.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 1155; Нарушение авторских прав?; Мы поможем в написании вашей работы!