КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
В нафтовій і газовій промисловості
|
|
|
|
АВТОМАТИЗОВАНИХ СИСТЕМ КЕРУВАННЯ
СУЧАСНІ ТЕНДЕНЦІЇ ПОБУДОВИ
Для забезпечення надійності і ефективності функціонування різноманітних технологічних процесів і установок в нафтовій і газовій промисловості необхідні сучасні системи управління і моніторингу [6]. Світові тенденції до побудови систем управління передбачають інтеграцію систем контролю і управління різними ділянками виробництва і енергоресурсами в єдину систему управління виробництвом. Вважається, що управління технологічними процесами і виробництвами повинно бути зв'язаним з ефективним управлінням енергоресурсами. При такій інтеграції систем управління інформація про наявність і використання енергоресурсів стає доступною і необхідною для всіх ланок управління підприємством.
Використання цієї інформації для керування дозволяє оптимізувати технологічні процеси, зменшити непродуктивні втрати часу, впливати на собівартість продукції і показники рентабельності підприємства.
Системи такого виду забезпечують функціональну, інформаційну, технічну і програмну інтеграцію.
Функціональна інтеграція в умовах багаторівневої системи заключається в узгодженні критеріїв кожного рівня.
Інформаційна інтеграція реалізується на основі банку даних, що обслуговує функціональні задачі управління в системі вводу, контролю, управління і контролю баз даних.
Технічна інтеграція забезпечується сумісністю застосованих технічних засобів.
Програмна інтеграція базується на комплексній організації програмного забезпечення функціональних задач.
В інтегрованій автоматизованій системі управління можна виділити дві основні групи задач: задачі автоматизованого управління технологічними процесами і техніко-економічні задачі управління підприємством в цілому.
|
|
|
Враховуючи традиції вітчизняного приладобудування і потужний потік систем західних фірм, розглянемо питання класифікації об’єктів і систем автоматизації, що використовуються в розвинутих країнах світу [7 ].
Виробничі процеси і об'єкти, якими керують автоматизовані системи управління, прийнято розділяти на такі категорії:
- Manufacturing - мануфактурні виробництва переважно з обробкою дискретних сигналів (обробка металів, фасовка, упаковка, поточно-транспортні виробництва);
- Continuous - неперервні процеси переважно з обробкою аналогових сигналів: реактори, печі, котли і т. п.;
- Batch - групові об'єкти, де підготовка компонентів асоціюється з паралельною обробкою і наступним етапом остаточної обробки (змішувачі, дозуючі пристрої). Наприклад, приготування напівфабрикатів в змішувачі в заданих пропорціях, накопичення певної маси кожного компонента в бункерах дозаторів;
- Utility Management - управління установками та інженерними
спорудами, що забезпечують життєдіяльність промислових і непромислових споруд і об'єктів інфраструктур на великих відстанях (передача енергоресурсів - електроенергії, газу, нафти, води, тепла і контроль за їх розподілом);
- Building Management System (BMS) – системи управління спорудами. Іноді їх можна розглядати як варіант систем Utility Management з додатковими функціями: (комплексне керування в спорудах освітленням, теплопостачанням, подачею води, газу, керування тарифами, і т. п.).
Якщо для перших трьох типів процесів характерні обробка і управління виробничими процесами в реальному часі, то для об'єктів Utility і BMS головними функціями є збір інформації, моніторинг об'єктів і дистанційне керування в режимі, що не є критичним по часу.
Згідно вітчизняної термінології автоматизовані систем управління перших трьох типів процесів можна класифікувати як АСКТП у виробництві, а четверту - як АСКД (Д - диспетчеризації).
|
|
|
Оскільки кожен тип об'єктів має свої особливості як в побудові систем так і в їх реалізації, історично сформулювалися два напрямки розробки пристроїв і систем:
РІ.С: Programmable Logic Controller - програмований логічний контролер (ПЛК);
DCS: Distributed Control System - Розподілена система управління (РСУ).
Фірми, що виробляють ці пристрої і системи, в 1997 році контролювали 99 % світового ринку засобів автоматизації, який складав 12 млрд. доларів.
Найбільш відомою в Україні є продукція Schneider Automation. Гамма промислових контролерів, що включає моделі TSX/PMX 47-107 Modicon серії 984. MODICON TSX, Nano, Micro, Compact, Premium, Quantum сертифікована на відповідність вимогам Держстандарту і внесена у Держреєстр.
Створення інтегрованих систем управління базується на сучасних засобах і системах автоматизації, наприклад, системі SCADA - Supervisory Control And Data Acquisition (система супервізорного управління і збору даних), що виробляється відомою фірмою Шнейдер Електрик [8].
SCADA з успіхом використовується на верхньому рівні системи автоматизації резервуарного парку нафтоперекачуючої станції "Кременчук" на підприємстві Придніпровських магістральних нафтопроводів м. Кременчук.
Вона створена на базі програмного пакету Factory Link фірми US Data. Пакет має велику потужність., гнучкість, можливості розширення і переходу з однієї операційної системи на іншу.
Програми нижнього рівня реалізовані з використанням пакету Concept, що поставляється фірмою Schneider в комплекті з технічними засобами Modicon. Все програмне забезпечення контролерів побудовано за модульним принципом, що забезпечує високу гнучкість при додаванні і скороченні функцій системи в процесі експлуатації.
Система управління і моніторингу SCADA, що містить програмно-апаратні засоби, взаємодіючи між собою через глобальні мережі, складається із:
1. SCADA nost - основою вузла SCADA. Це мікропроцесорний пристрій, що використовується для супервізорного контролю, управління і моніторингу в SCADA системі і організації людино-машинного інтерфейсу.
2. MTU - Master Terminal Unit (головний термінальний пристрій) - це мікропроцесорний пристрій, що іноді використовується в SCADA системі як концентратор даних для SCADA nost, може також дублювати RTU.
|
|
|
3. RTU - Remote Terminal Unit (віддалений термінальний пристрій) - це мікропроцесорний пристрій, що традиційно використовується для збору і контролю аналогових і дискретних сигналів і виконання дистанційних команд управління, що отримуються від SCADA nost.
4. Комунікаційне обладнання і засоби передачі даних. Існують три основних типи SCADA систем:
- великі - більше ніж 500 RTU;
- середні-між 100 і 500 RTU;
- малі - менше ніж 100 RTU.
Вони використовуються для автоматизації об'єктів передачі і розподілу електроенергії, водопостачання, водоочисних споруд, транспорту нафти і газу та ін.
В якості зв'язку в SCADA використовуються модеми, телефонні і радіоканали, супутники.
В якості комунікаційних протоколів використовуються протоколи UCA, ІЕС-870-5, HART, Modbus.
Для побудови систем SCADA та інших систем автоматизованого керування краще використовуються програмуючі контролери - PLC.
Виконання задач локального керування компресорними і нафтоперекачуючими станціями при транспортуванні газу і нафти, котельними насосними станціями у водоканалах і тепломережах здійснюється в світі традиційно на техніці PLC.
Вони мають широку гамму модулів ввід/вивід, вбудовані функції комунікацій, ПІД-регулювання, операторський діалог, великі обчислювальні можливості і тому можуть інтегрувати функції PLC і RTU на єдиній програмно-операційній базі.
До цього класу контролерів відносяться MODICON TSX. Nano, Micro, Premium. Quantum і особливо контролер MODICON TSX Compact, який виготовляється з 1998 року. В порівнянні з іншими контролерами Schneider Automation має такі переваги:
- робота в режимі температур-40 °С до-70 °С;
- спеціальне покриття модулів для роботи в хімічно-агресивному середовищі;
- унікальні функції комунікації - може бути включеним в глобальну мережу через радіомодемний, телефонний або супутниковий зв'язок:
- алгоритми розрахунків потоків рідин і газів, що відповідають міжнародним стандартам 18012213;
- велика пам'ять (до 4 Мб) для локального зберігання;
- іскровибухобезпечність каналів вводу/виводу;
- наявність готових до використання комплексів задач в області транспорту нафти і газу, водо- і теплопостачання, а також електроенергетиці.
|
|
|
За допомогою цих керуючих пристроїв забезпечують загальновідомий ПІД-закон керування
F(P) = Kо + Kі / P + Kа P, (2.1)
де F(Р) - передавальна функція;
Kо,Ki,Ka - коефіцієнти пропорційної, інтегральної та диференційної складової закону керування.
Формула (2.1) - стандартна передавальна функція ПІД - регуляторів (PID - controlles).
Останні 10 років в розвинутих країнах світу широко використовуються нечіткі логічні регулятори НЛР (FLC -Fuzzy Logic Controlles), [9].
Вони основані на виконанні логічних правил такої форми:
ЯКЩО (умова) ТО (дія) і всі правила використовуються рандомізовано.
Наприклад:
ЯКЩО (х1 є а1, х2 є а2,..., хn є аn) ТО (вихід є bj), (2.2)
де (х1, х2,..., хn - деякі змінні системи:
asj - належать А{і = l,...,n;j = l,..,k);
bj - належать B(j = 1,...,k}.
А і В є множинами, елементи яких є нечіткими множинами. Припустимо для прикладу, що
А = В = [ВД, СД, МД, HP, Н, НВ, MB, СВ, ВВ},
де ВД - велике додатне;
СД - середнє додатне;
МД - мале додатне;
HP - нульове додатне;
Н - нульове;
НВ - нульове від'ємне;
MB - мале від'ємне;
СВ – середнє від’ємне;
ВВ - велике від'ємне (рис2.1).
Сукупність функцій нечіткої множини aіj, і bj може бути визначена різними шляхами, наприклад, за допомогою Z-функцій, S-функцій, трапецевидних, експоненціальних функцій та ін. Використання конкретної сукупності функцій залежить від практичної ситуації.
Якщо сукупність нечіткої множини aіj, позначити як Ubj(х), то використовуючи нечітке правило (2.2), вихід нечіткого регулятора повинен розраховуватись
Uj = Ubj (x) · уj, (2.3)
де Uj - задовільняє (2.4)
Ubj (yk) = l (2.4)
і
 (2.5)
(2.5)
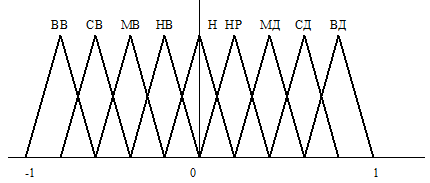
Рисунок 2.1 – Сукупність функцій трикутного типу
Вихід шукають як всю множину правил, що визначається як центр тяжіння або центр максимумів, або іншим методом комбінації вихідної сукупності функцій.
Останнім часом використовують комбінації ПІД-регулятора з нечітким логічним регулятором НЛР. Ієрархія системи, що містить ПІД-регулятор і нечіткий логічний регулятор НЛР приведена на рис. 2.2.
Цей регулятор може бути описаний такими алгоритмами функціонування
P(k+1) = f[ω(k), u(k), y(k)], (2.6)
x(k+1) = g[x (k), ω (k), p(k), y(k)], (2.7)
u(k) = h[p(k), ω(k), y(k), x(k)], (2.8)
де k – дискретний змінний час.
Замкнена система керування, що містить ПІД – і НРЛ – регулятори приведена на рис. 2.3.
Система, що розглядається, складається з ПІД – і НРЛ – регулятора і лінійної динамічної ланки з передавальною функцією:

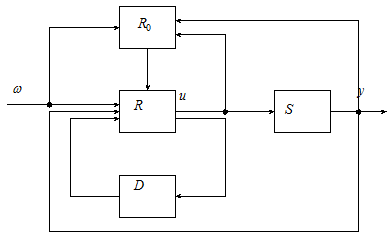 Тут: R – ПІД – регулятор;
Тут: R – ПІД – регулятор;
R0 – нечіткий регулятор;
S – керований об’єкт;
D – однокроковий час затримки;
P – вектор параметрів регулятора R;
ω – зовнішній вхід регулятора;
u – вихідна змінна регулятора;
x – змінна внутрішнього стану регулятора;
y – вихідна змінна системи керування;
Рисунок 2.2 – Ієрархія системи керування, що містить ПІД – регулятор і нечіткий логічний регулятор НРЛ
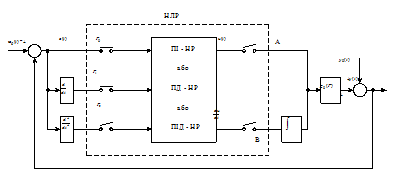
Рисунок 2.3 – Замкнена схема керування з ПІД – НРЛ – регулятором
Як видно з рис. 2.3, тип нечіткого регулятора залежить від стану вимикачів P0, P1, P2, A і B. Це означає, що вимикачі формують булеву функцію S = S(P0, P1, P2, A і B), яка ідентифікує тип НРЛ (табл. 2.1).
Таблиця 2.1-Типи нечітких регуляторів і їх параметри
| Регулятор | Ро,Р1, Р2,А,В | Тип нелінійності | Константи | Полі-номи |
| ПІ-НР | 
| 
| 1+q1p | |
| ПД-НР | 
|
| 1+q1p | |
| ПІД-НР | 
|  
| 1+q1p+ +q2 p2 |
У таблиці 2.1 використовуються такі позначення 1- вимикач замкнений; 0 - вимикач розімкнений,
Звичайно, не всі позиції вимикачів використовуються, хоча за допомогою їх можна створити різноманітні типи регуляторів:
П-НР, І-НР, Д-НР, РІ-НР, РД-НР, ІД-HP і нарешті ПІД-НР, але основними е три типи: ПІ-HP, ПД-НР і ПІД-НР, тому що саме вони найбільш часто використовуються на практиці. Відомо, що кожен нечіткий регулятор має чіткий еквівалент у вигляді ланки, “вхід-вихід”, тобто нелінійної функції. В нашому випадку ці функції мають такий вигляд:
 |
для ПІ - НР або ПД - НР
для ПІД-НР
де функція S= S(P0, Р1, Р2, А, В) не залежить від часу, тому що P0, Р1, Р2, А, В є фіксованими для кожного типу регулятора. З іншого боку, регулятор виробляє керуючий сигнал і тому функція є ще й функцією часу. Це ускладнює аналіз стійкості систем керування такого класу, але це питання вирішене в роботі [10].
Наступним кроком розвитку нечітких систем керування є створення і використання багаторівневих НЛР що є комбінацією однорівневих НЛР в нечітку мережу - (Fuzzy Net). Вони можуть бути використані для керування дуже великими і складними технічними системами у майбутньому.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 585; Нарушение авторских прав?; Мы поможем в написании вашей работы!