КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Тема 1. Стабілізація неперервних технологічних процесів
|
|
|
|
Вплив таких властивостей технологічних процесів як розподільність змі-нних, запізнення, нестаціонарність, нелінійність, наявність самовирівнювання на структуру автоматичних систем регулювання (АСР). Застосування замкне-них та розімкнених АСР.
Види комбінованих АСР. Використання принципа інваріантності при їх по-будові. Фізична реалізація та настройка комбінованих АСР. Види каскадних АСР.
Загальна характеристика методів настройки регуляторів. Аналітичні і експериментальні методи настройки регулятора. Настройка за характерис-тиками об’єкта та системи. Методи реалізації настройк.
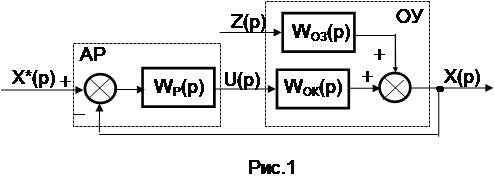
Визначемо вплив показників статичних і динамічних характеристик об'єкта за різними каналами на такі найважливіші показники якості процесу регулю-вання, як динамічна і статична помилки. Структура найпоширенішої однокон-турної замкнутої АСР (рис.1) включає в себе об'єкт керування (ОК) і автома-тичний регулятор (АР). На рис.1 застосовані такі позначення: X*(p), X(р) – зображення за Лапласом відповідно змін завдання і регульованої змінної; U(p), Z(р) – зображення за Лапласом відповідно змін керувальної дії і збурення; WОК(р), WОЗ(р) – передатні функції об'єкта за каналами керування й збурення. Як відомо з теорії автоматичного керування, для замкнутої системи стабілізації справедливим є таке співвідношення, що зв'язує відхилення регульованої змі-нної Х(р) зі зміною збурення
Х(р) = Z(p) WОЗ(р) / [1+ WОК(р) WР(р)]. (1)
Для систем програмного регулювання і слідкування взаємозв'язок зміни X (p) із зміною завдання Х*(p) має такий вигляд:
Х(р)= Х*(p) WОК(р) WР(р)] / [1+ WОЗ(р) WР(р)]. (2)
 |
Із співвідношень (1) і (2) видно, що менші відхилення X будуть спостеріга-тися в об'єктах із меншими передатними функціями за каналами збурення і великими – за каналами керування.
|
|
|
У статиці (р = 0) передатні функції вироджуються у відповідні коефіцієнти передачі. Для вибору каналу регулювальної дії визначають вплив вхідної дії за розміром коефіцієнта передачі об'єкта за каналом керування KК і діапазоном зміни керувальної дії Dumах. Домогтися необхідної якості регулювання в статиці можна, якщо вплив керувальної дії на регульовану змінну не буде меншим впливу найбільшого із збурень, тобто при виконанні умови:
|KК Dumах | ³ | KЗ Dzmах |, (3)
де KЗ – коефіцієнт передачі за каналом збурення.
Під час аналізу динамічних властивостей об'єктів у першу чергу необхідно враховувати місце вводу керування і збурення (у багатоємнісних об'єктів вони різні). У переважній більшості випадків передатні функції об'єкта за каналами збурення і керування апроксимуються залежностями вигляду
WОЗ(р) = KЗ ехр(– рtЗ) / (ТЗ р +1), (4)
WОК(р) = KК ехр(– рtК) / (ТК р +1), (5)
де ТЗ,ТК – сталі часу за каналами збурення і керування; tЗ, tК – запізнення за цими самими каналами. Спільний аналіз виразів (1), (4) і (5) показує, що менша динамічна помилка буде (при тому самому збуренні) в об'єкті, у якого більша ТЗ і менше ТК і tК.
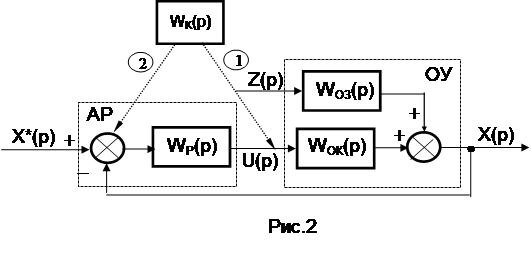
Якщоза допомогою замкнутої одноконтурної системине забезпечується необхідна динамічна помилка, тозастосовуютьсябагатоконтурні АСР, най-більш поширеними серед яких є комбіновані.Вонивикористовуютьсяу випа-дках, коли об’єкт має несприятлеві динамічні властивості за каналом збурення (найчастіше – основного) і є вимірювальні перетворювачі для його виміру. При побудові комбінованої АСР необхідно розробити її структуру і визначити па-раметри компенсатора (компенсаторів). Передатна функція компенсатора виз-начається передатними функціями об'єкта за каналами основного збурення і керування. Вихід компенсатора може бути під’єднаний безпосередньо до входу об'єкта (до виконавчого механізму, на який впливає регулятор) (рис.2, 1-ий варіант) або до входу регулятора (рис. 2, 2-ий варіант). При під’єднанні ком-пенсатора до входу об'єкта передатна функція компенсатора WK(p) визначає-ться за співвідношенням
|
|
|
WK(p) = WOЗ (p) / WOК (p), (6)
а у разі під’єднанні компенсатора до входу регулятора – за співвідношенням
WK(p) = WOЗ (p) / WР (р) × WOК (p), (7)
де WР (p) – передатна функція регулятора.
В обох випадках буде забезпечуватися часткова інваріантність АСР (інва-ріантність щодо основного збурення, яке компенсується), що дасть можливість зменшити динамічну помилку регулювання. Проте порівняння обох варіантів показує, що кращим є під’єднання компенсатора до входу об'єкта. При цьому структура компенсатора залежить тільки від властивостей об'єкта. При під’єд-нанні до входу регулятора, як випливає з виразу (7) зміна настройки регуля-тора, потребує зміни настройки компенсатора, а зміна закону регулювання ре-гулятора спричинить необхідність заміни компенсатора. Крім того, у цьому разі можливе також виникнення статичної помилки, зумовлене тим, що на вході регулятора будуть зрівнюватися не тільки сигнали завдання X* і поточного значення змінної X, але й і сигнал компенсатора.
Отже, така АСР повинна забезпечити виконання таких умови в статиці:
Х* = Х + Z KK, (8)
де KK - коефіцієнт передачі компенсатора.
Якщо комбіновані АСР ефективні при неприятливих динамічних власти-востях об’єкта за каналом збурення, то при несприятлевих динамічних власти-востях об’єкта за каналом регулювальної дії більш ефективні каскадні систе-ми, які складаються з внутрішнього і зовнішнього контурів регулювання. Іс-нують чотири класи таких систем: каскадно-зв’язані, каскадно-диференціальні, каскадно-автономні і каскадно-незв’язані.
Каскадно-зв’язані як і більшість інших каскадних систем мають два контури регулювання, які розташовані один в другому: головний РГ (зовнішній, коригувальний або задавальний) та допоміжний РД (внутрішній, стабілізуючий або слідкувальний). Основна регулювальна величина об’єкта подається на вхід РГ, а сигнал проміжної змінної на вхід РД. Вихід РГ використовується для зміни завдання РД, який в свою чергу діє на регулювальний орган
|
|
|
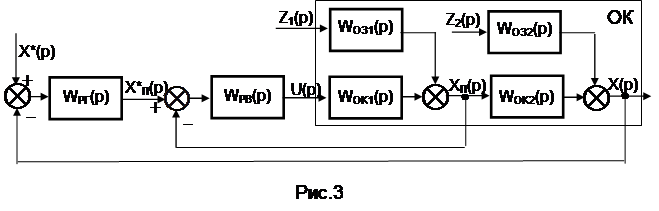
Структурна схема системи наведена на рис.3. Формула, що ій відподає має такий вид:
Х(р) = X*(p)WCГ(р)/[1+WCГ(р)+WCВ(р)]+Z1(p)WОЗ1(p)WОК2(p)/[1+WCГ(р) +
+ WCВ(р)] + Z2(p)WОЗ2(p)[1+ WCВ(р)]/[1+ WCГ(р)+ WCВ(р)], (9)
де WCГ(р) = WРГ(р)WРВ(р)WОК1(p)WОК2(p); WCВ(р) = WРВ(р)WОК1(p) – передатні функції відповідно розімкнутих систем головного і допоміжного регуляторів.
 |
Із структурної схеми видно, що внутрішній контур послаблює дію збурень, які охоплює цей контур на регульовану величину Х(р), причому ця дія буде тим менше, чим більша швидкодія допоміжного контуру порівняно з головним контуром. Це накладає певні вимоги га вибір допоміжної змінної ХП(р), яка повинна зі значно меншою інерційністю порівняно з Х(р) реагувати на основні збурення.
Таким чином, застосування каскадних АСР доцільно в тих випадках, коли внутрішній контур має значно більшу швидкодію ніж зовнішній і коли основні збурення охоплені внутрішнім контуром. До таких збурень відносяться часті зміни якості регулювального середовища з умовою, що динамічні властивості об’єкта за цим каналом гірші ніж за каналами інших збурень. Інший випадок застосування каскадних АСР пов’язаний з паралельною роботою групи апара-тів. Тоді кількість внутрішніх контурів дорівнює кількості апаратів, причому кожний з цих контурів стабілізує технологічний режим в певному апараті, а РГ діє на них, змінюючи завдання РД у разі необхідності зміни режиму роботи такого технологічного комплексу. Зменшення впливу цих збурень на Х(р) мо-жна досягнути і за рахунок додаткових автономних регуляторів стабілізації цих збурень, але в такому випадку необхідне застосування додаткових регулю-вальних органів.
Вважають, що динамічна похибка каскадної АСР по відношенню збурень, що охоплені внутрішнім контуром, зменшується у 10-100 разів, а по відноше-нню збурень, що не охоплені цим контуром у 2-5 раз, порівняно із застосу-ванням одно контурних АСР. Останнє відбувається за рахунок зменшення інерційності системи.
|
|
|
До об’єктів, що потребують каскадних АСР, відносяться, насамперед, підігрівачі, у яких теплоносій і продукт розділені по верхньою нагріву. В цьому випадку за каналом регулювальної дії цей об’єкт є багатоємнісним, а за ка-налом основного збурення (витрати продукту) – одно ємнісним. Тому для пок-ращення якості регулювання температури продукту використовують проміжну змінну – температуру теплоносія біля поверхні нагріву.
До цього розглянуті об’єкти з однією регульованою зміною, тобто одно-вимірні, але більшість об’єктів є багатовимірними, тому що мають регульо-ваних змінних. При цьому у багатовимірних багато зв’язаних об’єктах між вхід-ними і вихідними змінними існують перехресні зв'язки. За відсутності пере-хресних зв'язків, коли кожна керуюча дія впливає лише на одну вихідну змінну, об'єкт можна розглядати як сукупність одновимірних (однозв'язаних) об’єктів, для регулювання яких використовують розглянуті раніше одно- і багато- контурні АСР однієї змінної.
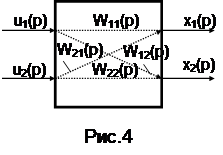
Якісну оцінку взаємного впливу двох контурів регулювання проводять за допомогою комплексного коефіцієнта зв’язності:
КЗВ(jw) = W12(jw) W21(jw) / W11(jw) W22(jw), (10)
де W12(jw), W21(jw) – частотні характеристики об'єкта за перехресними канала-ми: u1–x2,u2–x1; W11(jw), W22(jw) – частотні характеристики об'єкта за прямими каналами: u1–x1, u2-–2 (рис.4).
 |
Значення коефіцієнта зв’язності зазвичай визначають при w = 0 (у статиці) і робочих частотах обох контурів регулювання. Зокрема KЗВ(0) визначається відношенням коефіцієнтів передачі за перехресним і основним каналами. За значенням цього коефіцієнта виділяють 4 випадки:
1) KЗВ  0, об'єкт розглядають як одноз’вязаний і застосовують незв'язане регулювання окремих змінних за допомогою одно- або багатоконтурних АСР;
0, об'єкт розглядають як одноз’вязаний і застосовують незв'язане регулювання окремих змінних за допомогою одно- або багатоконтурних АСР;
2) KЗВ>1, міняють місцями прямі і перехресні канали;
3) 1>KЗВ>0, застосовують зв'язане регулювання із використанням автоно-мних багатоконтурних систем регулювання;
4) KЗВ=1, найскладнішим випадок, тому що інерційності прямих і пере-хресних каналів однакові, запас стійкості за модулем зменшується в 2 рази, а застосування автономного регулювання не дає бажаного ефекта, тому застосо-вують незв’язане регулювання.
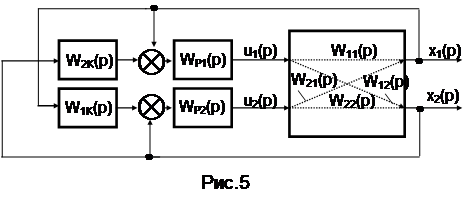
Автономні системи регулювання дають можливість проводити незале-жне регулювання взаємозалежних змінних. Вони включають, крім основних регуляторів, додаткові динамічні компенсатори. Умова автономності двох регу-ляторів (рис.5) складається з двох умов інваріантності: інваріантності першого виходу х1 щодо керувальної дії u2 іншого регулятора й інваріантності другого виходу х2 щодо сиг-налу u1 першого регулятора:
х1 (t, u2) = 0, х2 (t, u1) = 0. (11)
При цьому вплив u1 можна розглядати як збурення для х2, а вплив u2 – як збурення для х1. Отже, перехресні канали відіграють роль каналів збурення, тоді:
W1К(р) = W12(р)/W22(р); W2К(р) = W21(р)/W11(р). (12)
Недоліками автономних АСР є складність їх розрахунку і налагодження; великі витрати на створення автономної АСР з великою кількістю перехресних зв'я-зків; при n перехресних зв'язків потрібно n(n-1) компенсаторів.
 |
При цьому вплив u1 можна розглядати як збурення для х2, а вплив u2 – як збурення для х1. Отже, перехресні канали відіграють роль каналів збурення, тоді:
W1К(р) = W12(р)/W22(р); W2К(р) = W21(р)/W11(р). (13)
Недоліками автономних АСР є складність їх розрахунку і налагодження; великі витрати на створення автономної АСР з великою кількістю перехресних зв'я-зків; при n перехресних зв'язків потрібно n(n-1) компенсаторів.
При створенні АСР необхідно не тільки розробити структуру системи та ви-значити передатні функції її компонентів, але й виконати її параметричну оптимізм-цію, тобто визначити оптимальні настройки регулятора. При цьому параметри настройки регулятора повинні бути такими, щоб у замкненої АСР обраний показник якості регулювання прагнув до екстремального значення при обмеженні за стійкістю системи. Для АСР з лінійними регуляторами як крите-рій використовують один із таких показників: час регулювання, динамічна по-хибка, інтегральні критерії якості, середня квадратична похибка. При оптимі-зації прагнуть їх мінімізувати. Обмеженням при цьому найчастіше виступає ступінь згасання перехідного процесу y або ступінь коливальності m. Опти-мізація в інженерній практиці проводиться як аналітичними, так і експери-ментальними методами. Серед яких доволі поширеним є метод Циглера – Ніко-льса, призначений для визначення настройок регуляторів, що забезпечують мінімум інтегрального квадратичного критерію при ступені згасання не нижче 0,8. Відповідно до цього методу розрахунок настройок виконують у два етапи:
1) розраховують критичну настройку АСР з П-регулятором, за якою система перебуватиме на межі стійкості;
2) визначають за значеннями критичного коефіцієнта передачі регулятора КР.КР і частоти власних коливань wКР оптимальні настройки регулятора.
Існує також група експериментальних методів, які базуються на засто-суванні наближеної моделі об’єкта чи системи, отриманої з використанням не-великої кількості типових елементарних ланок. Послідовність настроювання за цими методами при використанні моделі об’єкта така:
1) вибирають критерій оптимальності перехідного процесу (КОПП) АСР;
2) визначають динамічні параметри об’єкта (ДПО) з використанням, як правило, експериментальних методів з аперіодичними, періодичними або випа-дковими вхідними діями;
3) з допомогою номограм або спрощених формул для обраного КОПП та визначених ДПО розраховують оптимальні параметри настроювання регуля-тора;
4) реалізують розраховані настройки на регуляторах контролерів програм-ним шляхом; для подолання розбіжності між якісними показниками перехід-ного процесу і КОПП, що виникають у результаті прийнятих спрощень, настро-йки регулятора уточнюють під час спробної експлуатації АСР.
А при використанні моделі системи (1 п. такий же):
2) замкнену чи розімкнену АСР досліджують з періодичними, аперіодич-них чи випадковими збуреннями;
3) далі при застосуванні ітераційного пошукового алгоритму покроково змінюють параметри настройки регулятора (ПНР) до досягнення екстремаль-ного значення КОПП.
Література для самостійної роботи: [5] С.19,20,26-41,51-57; [1] С.3-5,6,7, 9-11, 13,14,16-19,22-27; [9] С.327-341; [10] с.817-819, 861-885, 892- 895, 901-910; [17] с.279-301; [3] с. 82-87, 99-119.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 725; Нарушение авторских прав?; Мы поможем в написании вашей работы!