КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Трёхфазные синхронные двигатели
|
|
|
|
3.1 Назначение:
Достоинства: 1) возможность компенсации реактивной мощности (они могут вырабатывать реактивную мощность); 2) постоянство частоты вращения.
Недостатки: 1) необходимость дополнительного источника постоянного тока для питания обмотки возбуждения; 2) сложность пуска; 3) сложность конструкции (по сравнению с АД).
Синхронные двигатели (СД) применяются для нерегулируемых электроприводов средней и большой мощности (до 20000 кВт), работающих с редкими пусками в длительном режиме (компенсаторы, мощные центробежные насосы), используют синхронные двигатели (СД), имеющие большой КПД и  .
.
СД малой мощности в приводах, не требующих постоянства частоты вращения применять нецелесообразно, так как эксплуатационные преимущества не окупают капитальных затрат.
Устройство:
(Синхронные – т.е. частота вращения ротора равна частоте вращения магнитного поля)
Статор синхрон. Двигателя выполняется по аналогии со статором асинхронного двигателя.
Ротор представляет собой закреплённый на валу электромагнит постоянного тока, либо(в двигателе малой мощности) постоянный магнит.
Обмотка ротора, называемая обмоткой возбуждения, в работающем двигателе питается от источника постоянного тока через 2 щётки и 2 контактных кольца, жёстоко закрепленных на валу и электрически соединённых с обмоткой возбуждения (по аналогии с электромагнитной муфтой).
Принцип действия:
Исходное состояние: статор неподвижно закреплён, вал сочленён с исполнительным органом машины. Обмотка возбуждения подключена к источнику постоянного тока. Обмотка статора, соединённая треугольником или звездой, подключена к трёхфазной сети.
Обмотка возбуждения создает магнитное поле, магнитный поток которого  . Трёхфазная симметричная система токов обмотки статора создаёт круговое вращающееся магнитное поле, частота вращения которого
. Трёхфазная симметричная система токов обмотки статора создаёт круговое вращающееся магнитное поле, частота вращения которого 
|
|
|
где р – число пар полюсов магнитного поля и ротора.
Магнитное поле ротора взаимодействует с магнитным полем статора (притяжение разноименных полюсов), результатом этого взаимодействия является электромагнитный момент, создаваемый исполнительным органом рабочей машины.
Вращающееся магнитное поле индуцирует в каждой фазе обмотки статора синусоидальную ЭДС, действующее значение которой 
где  - постоянная величина;
- постоянная величина;
n – частота вращения ротора;
 - магнитный поток.
- магнитный поток.
 Ток в обмотке статора создаётся совместным действием напряжения трёхфазной сети и противо ЭДС обмотки статора. Ротор вращается в том же направлении что и магнитное поле статора с частотой
Ток в обмотке статора создаётся совместным действием напряжения трёхфазной сети и противо ЭДС обмотки статора. Ротор вращается в том же направлении что и магнитное поле статора с частотой  (т.е. синхронный).
(т.е. синхронный).
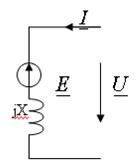
Схема замещения и электрического состояния обмотки статора:
При анализе трёхфазных синхронных двигателей удобно
использовать схему замещения одной фазы обмотки статора.
Если пренебречь активным сопротивлением обмотки
статора, то схема замещения будет иметь такой вид:
Уравнение электрического состояния, в соответствии со схемой замещения:
 .
.
Формула электромагнитного вращающегося момента, угловая и механическая характеристики двигателя:
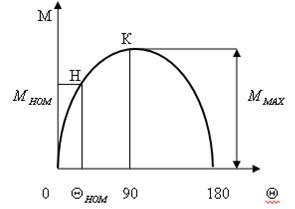
Угловой характеристикой синхронного двигателя называют зависимость электромагнитного вращательного момента от угла нагрузки при постоянном действующем напряжении, постоянной частоте этого напряжения и при постоянном токе в обмотке возбуждения.
Т.е.  М = φ(Θ) при U = const, f = const,
М = φ(Θ) при U = const, f = const,  = const.
= const.
Уравнение угловой характеристики выведем, используя векторную диаграмму тока и напряжений одной фазы обмотки статора.
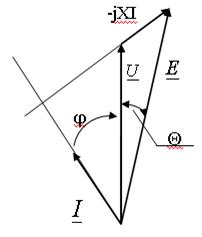
1. строим 
2. строим -jXI
3. замыкающий вектор  .
.
Синхронные двигатели как правило, работают в перевозбуждённом режиме с током, опережающим по фазе напряжение, т.е. двигатель потребляет от трёхфазной сети ёмкостную мощность, что тоже самое что отдаёт в сеть индуктивную мощность, которая требуется трёхфазным асинхронным двигателям.
|
|
|
Сдвиг фаз между напряжением и ЭДС называется углом нагрузки Θ. Чем больше механически противодействующий момент, тем длиннее вектор jXI, тем больше угол Θ. В режиме идеального холостого хода Θ=0 (т.к. I=0).
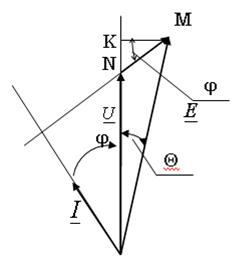
Из треугольника ОКМ: КМ = ЕsinΘ.
Из треугольника NКМ: КМ = ХIcosφ.
ЕsinΘ = ХIcosφ.
Электромагнитный момент:
 -
-
- уравнение угловой характеристики.
Устойчивая работа двигателя возможна только на участке ОК угловой характеристики. Номинальный угол нагрузки выбирают из условия, чтобы кратность максимального момента
 была бы примерно такой же, что и в
была бы примерно такой же, что и в
асинхронном двигателе, т.е.  .
.
В отличии от асинхронного двигателя синхронные двигатели менее чувствительны к изменением напряжения, т.к. их моменты пропорциональны напряжениям в первой степени. Максимальный момент (перегрузочная способность двигателя) зависит от тока в обмотке возбуждения. Чем больше ток возбуждения  , тем больше поток , тем больше Е, тем больше
, тем больше поток , тем больше Е, тем больше  .
.

 >
>
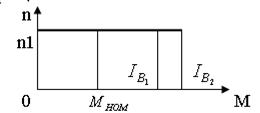
Механическая характеристика синхронного двигателя абсолютно жесткая, т.е. частота вращения не зависит от момента.
 <
<
Саморегулирование вращающегося момента:
Способы пуска в ход двигателя, регулирование частоты вращения, реверсирования двигателя:
Начальный пусковой момент равен 0. Поэтому применяют искусственные способы пуска двигателя. А практике наиболее часто используют прямой асинхронный пуск и частоточный пуск.
Рассмотрим прямой пуск: ротор двигателя, предназначенный для асинхронного пуска, снабжают короткозамкнутой дополнительной обмоткой, выполненной по типу беличьего колеса. Пуск происходит следующим образом: обмотка возбуждения замыкается на пусковой резистор (что бы произошла изоляция обмотки).
Обмотка статора подключена к трёхфазной цепи на номинальное напряжение, и двигатель запускается как асинхронный. Когда частота вращения ротора будет близка к синхронной, пусковой резистор отключится, и обмотка возбуждения подключится к источнику постоянного тока. Далее двигатель самостоятельно входит в синхронизм.
|
|
|
Частотный пуск производится следующим образом: обмотку возбуждения подключают к источнику постоянного тока, обмотку статора подключают к регулятору частоты и плавно увеличивают частоту напряжения регулятора от 0 до номинального значения. Магнитное поле и ротор плавно увеличивают свою частоту вращения от 0 до синхронной.
Синхронные двигатели являются, как правило, нерегулируемыми, но если требуется изменить частоту вращения, то это можно сделать только изменением частоты напряжения.
Реверсирование аналогично с асинхронным двигателем.
|
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 1353; Нарушение авторских прав?; Мы поможем в написании вашей работы!