КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основні вимоги до приводів головного руху. Типи приводів. Механізми фіксованої зупинки шпинделя в заданому положенні
|
|
|
|
Приводи головного руху
Лекція 9
Приводи головного руху повинні мати жорстку механічну характеристику, малий час перехідних процесів, малі втрати потужності, постійну потужність на кінцевій ланці незалежно від його швидкості, можливість автоматичної зміни швидкостей під навантаженням або в процесі наладки.
Для вибору приводу, крім вихідних даних, необхідно чітко сформулювати вимоги до нього, переваги і недоліки аналогічного існуючого приводу, необхідність зміни кінематики верстата. Загальні вимоги повинні бути доповнені вимогами, що відбивають специфіку верстата і даного приводу.
Вибір приводу, як правило, потребує аналізу багатьох варіантів рішень, при цьому оптимальне рішення приймається на основі техніко-економічних розрахунків і аналізу ступеня задоволення основних вимог, що ставляться до приводу. Так, використання кількох двигунів у верстаті дозволяє скоротити кінематичні ланцюги, спростити управління, автоматизувати цикл роботи. Для скорочення часу проектування приводів головного руху застосовують ЕОМ.
Поширеним типом приводу у верстатах середніх розмірів, коли не потрібно змінювати частоту в процесі роботи, є привод з асинхронним нерегульованим двигуном і коробкою швидкостей.
Асинхронні двигуни необхідно вибирати з урахуванням геометричної точності, вібрації і шуму. Для верстатів нормальної точності двигун по вібраціях може бути класу 2, а для підвищеної точності – 1.
Для вибору асинхронного двигуна необхідно визначити режим його роботи і привести його до одного зі стандартних режимів відповідно до ГОСТ 183-74. Передбачено такі режими роботи: тривалий S1, що відповідає постійному навантаженню на валу двигуна протягом тривалого часу; короткочасний S2, що відповідає короткочасному навантаженню на валу двигуна; повторно-короткочасний S3, S4, S5, що характеризується тривалістю вмикання; перемежований S6, при якому двигун працює постійно; перемежований S7, S8, що характеризується числом реверсів або переключень за годину і коефіцієнтом інерції.
|
|
|
Коли в процесі обробки деталі на верстаті з ЧПУ доводиться безступінчасто регулювати частоту обертання в широкому діапазоні, а електродвигун постійного струму має діапазон RN < Rn, то застосовують комбінований привод, що представляє собою сполучення двигуна постійного току з безступінчастим регулюванням і ступінчастої коробки передач.
У ступінчастій структурі для зниження шуму і забезпечення необхідної точності верстата необхідно витримувати максимально припустимі окружні швидкості передач: для прямозубих коліс у переключаємих передачах при nmax < 1500 об/хв не більше 9 м/с; для косозубих у верстатах нормальної точності nmax < 2500 об/хв не більше 14 м/с; для пасових передач у точних верстатах при nmax > 2500 об/хв не більше 25 м/с.
Для здійснення безупинного процесу різання з постійною потужністю і швидкістю при зміні частоти обертання шпинделя у всіх піддіапазонах (що найбільш актуально при торцевому точінні) застосовують коробки швидкостей з автоматичним перемиканням ступіней (АКШ) електромагнітними чи гідравлічними муфтами. Коробки АКШ випускаються кількох типорозмірів і використовуються в ряді верстатів із ЧПУ. Уніфіковані коробки швидкостей АКШ призначені для використання в приводах головного руху і подач металорізальних верстатів токарної, свердлильної, розточувальної і фрезерної груп, а також для застосування в деяких інших машинах. Привод АКШ забезпечує ступінчасте регулювання швидкості шпинделя в широкому діапазоні з практично постійною потужністю.
|
|
|
Уніфіковані коробки швидкостей дозволяють зосередити за допомогою механічної передачі всі операції керування приводом: пуск, гальмування, реверсування, регулювання швидкості. Вони забезпечують високу швидкість перехідних процесів, можливість перемикання при роботі, захист деталей привода від перевантажень і мають ряд інших переваг у порівнянні з коробками передач з пересувними блоками зубчастих коліс. В АКШ застосовані нормалізовані електромагнітні муфти з магнітопровід-ними дисками з безконтактним підводом струму. Гама АКШ включає сім габаритів (0–6) потужністю від 1,5 до 55 кВт.
Дистанційне керування приводом АКШ здійснюється за допомогою безконтактної тиристорної системи керування.
|
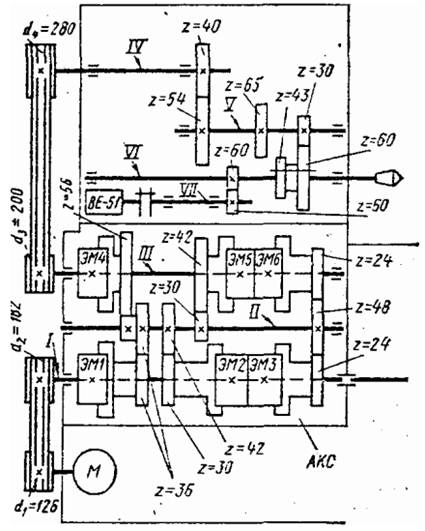
| Рис. 9.1. Кінематична схема автоматичної коробки швидкостей АКШ |
Кінематична схема приводу головного руху верстата 16К20ФЗС4 з АКШ приведена на рис. 9.1. Обертання шпинделю передається від асинхронного електродвигуна (потужністю P = 10 кВт і n = 1460 об/хв), поміщеного усередині основи, за допомогою клинових пасів і електромагнітних муфт ЕМ на вхідний вал I автоматичної коробки швидкостей (АКШ), з вихідного вала III АКШ за допомогою зубчастого ланцюга чи клинових пасів обертання передається на вхідний вал IV шпиндельної бабки. У шпиндельній бабці передбачене перемикання вручну двох діапазонів частот обертання з відношенням 1:3. АКШ по програмі має дев'ять значень частоти обертання, а в шпиндельній бабці внаслідок перемикання блоку зубчастих коліс z43 і z60 вручну збільшується вдвічі, що разом забезпечує 18 частот обертання шпинделя в діапазонах від 35 до 1600 об/хв (по дев'ять частот у кожному діапазоні). Керуються АКШ від пульта керування системи ЧПУ. Перемикач на пульті управління в автоматичному режимі встановлюється в положення «Автомат».
Для нарізування різьб у схемі передбачений датчик ВЕ-51. Вал VII одержує обертання від шпинделя за допомогою безпроміжкової зубчастої передачі 60:60 з передатним відношенням, рівним одиниці.
Для вмикання і вимикання різноманітних обертальних рухів у ступінчастих коробках швидкостей приводів головного руху верстатів з ЧПУ використовуються багатодискові електромагнітні муфти, що звичайно передають крутні моменти до 50...75 Н⋅ м і вище.
|
|
|
|
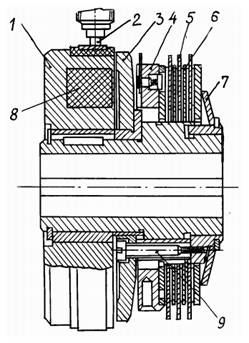
| Рис. 9.2. Електромагнітна муфта |
Електромагнітна муфта (рис. 9.2) складається з електромагніта 1, якоря 3, дисків 5 і 6, регулювальної гайки 4, натискної тарілчатої пружини 7 і пружин, що розтискають диски після того, як муфта знеструмлена. Якір і ярмо електромагніта виконані з заліза Армко. Внутрішні фрикційні диски 6 виконані зі сталі, зовнішні 5 – зі сталі з металокерамічною обкладкою, що являє собою металевий сплав на мідній основі.
|
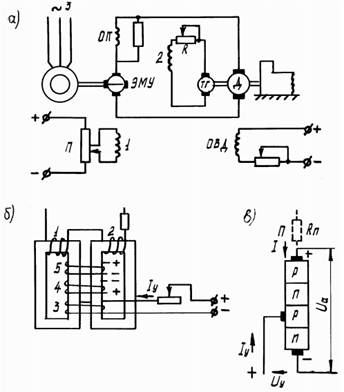
| Рис. 9.3. Принципові схеми електромашинного підсилювача (ЕМП) (а), магнітного підсилювача (МП) (б) і тиристора (в) |
Живлення до електромагнітної муфти підводиться через свічку-щіткотримач 2. Магнітний потік, створюваний котушкою, що знаходиться на хомуті, 8, замикаючись через якір, притягує останній до електромагніту. Якір 3 через гвинт 9 зв'язаний з хрестовиною, що у свою чергу, за допомогою тарілчастої пружини стискує зовнішні і внутрішні фрикційні диски, що передають крутний момент.
Застосування в системі генератор-двигун електромашинного підсилювача ЕМП в якості генератора (рис. 9.3, а) дає можливість значного розширення діапазону регулювання частоти обертання електродвигуна. Потенціометром П, що живиться постійним струмом, змінюють величину і напрямок струму в обмотці, що задає, ЕМП. Цим встановлюють потрібну частоту і необхідний напрямок обертання двигуна Д, зв'язаного з тахогенератором ТГ постійного струму. До затискачів ТГ підключена обмотка 2 ЕМП, ввімкнена послідовно з підналагоджуючим резистором Р. Магніторушійна сила обмотки 2 менша, ніж в обмотці 1, і діє їй назустріч (негативний зворотній зв'язок за швидкістю). При зменшенні частоти обертання Д під навантаженням, розмагнічувальна дія обмотки 2 зменшується, потік ЕМП зростає і напруга на його виході підвищується. Це розганяє Д до попередньої частоти.
Привід з ЕМП має велике число обертових електричних машин. Значний інтерес представляють приводи з нерухомими (статичними) апаратами управління, наприклад, приводи на основі застосування магнітного підсилювача (МП). Найпростіший МП являє собою два сердечники, зібраних з листової сталі, з обмотками 1, 2, 3, 4, 5 (рис. 9.3, б). Обмотку управління 3 включають у ланцюг постійного струму. По обмотках 1 і 2 протікає змінний струм.
|
|
|
При збільшенні постійного струму I_ в обмотці 3 росте підмагнічування сталевих сердечників. Внаслідок насичення зменшуються магнітні потоки, створені змінним струмом кожної з обмоток 1 і 2. Тому зменшуються індуктивності цих обмоток і їхні індуктивні опори. Таким чином, змінюючи постійний струм малої потужності в обмотці управління МП, можна керувати опором і значними потужностями ланцюга змінного струму. МП звичайно мають декілька обмоток керування (3, 4, 5), що дає можливість управління у функції декількох параметрів (додавання сигналів). Недоліком приводів з МП (ПМП) є їхня невисока швидкодія, викликана значною індуктивністю робочих обмоток МП.
У верстатобудуванні широке поширення одержують приводи з керованими напівпровідниковими вентилями-тиристорами (керованими випрямлячами, вихідна напруга яких пропорційна в широких межах вхідному керуючому сигналу постійного струму). Тиристори відрізняються високими ККД, відносно малими розмірами, високою швидкодією та спроможністю працювати в широкому діапазоні температур (від -60° до +60°С).
Тиристор (рис. 9.3, в) являє собою чотирьохшаровий напівпровідник з двома p − n переходами й одним n − p переходом. Величина сили струму I, що проходить через тиристор під дією анодноі напруги Ua, залежить від струму I_ управління, що проходить через керуючий електрод під дією напруги U_ управління.
Якщо струм управління відсутній (I_ = 0), то при підвищенні напруги Ua струм I у ланцюзі споживача буде наростати, залишаючись проте, дуже малим за розміром. У цей час перехід n – p, включений у напрямку, що не проводить, має великий опір. При визначеному значенні анодної напруги, що називається напругою вимикання, запалювання або перемикання, наступає лавинний пробій замикаючого прошарку. Його опір стає малим, а сила струму зростає до значення, яке визначається за законом Ома, опором Rп споживача С.
При збільшенні сили струму I_ напруга Ua зменшується. Струм I_, при якому напруга Ua досягає найменшого значення, називається струмом Ic випрямлення. Закривання тиристора відбувається при знятті напруги Ua або при зміні його знака.
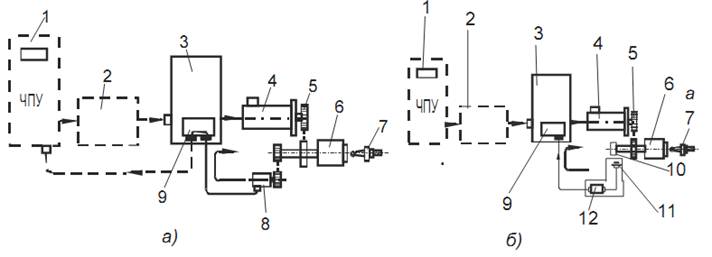
Для фіксованої зупинки шпинделя від системи ЧПУ застосовують додаткові ланцюги орієнтування (рис. 9.4).
|
| Рис. 9.4. Принципові схеми орієнтування шпинделя з використанням а) кодування позицій; б) магнітного датчика: 1 – система ЧПУ; 2 – контрольний ланцюг; 3 – вузол обслуговування шпиндельної бабки; 4 – двигун; 5 – передача; 6 – шпиндель; 7 – інструмент; 8 – пристрій кодування положень; 9 – ланцюг орієнтації; 10 – намагнічений елемент; 11 – магнітний датчик; 12 – підсилювач |
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 4537; Нарушение авторских прав?; Мы поможем в написании вашей работы!