КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Электродвигатели переменного тока. Асинхронные двигатели
Асинхронные двигатели получили наиболее широкое распространение в современных электромеханических системах и являются самым распро-страненным типом бесколлекторных электрических машин переменного тока. Область применения: исполнительные устройства систем автоматического управления, электроприводы бытовых электроприборов и крупных промышленных установок (мельницы, дробилки, экскаваторы). Мощность асинхронных двигателей перекрывает диапазон от долей ватта до тысяч киловатт.
Асинхронной называют такую машину переменного тока, у которой угловая скорость вращения ротора w2 отличается от угловой скорости вращения электромагнитного поля w1 и изменяется в зависимости от нагрузочного момента.
По конструкции и принципу действия их делят на:
1) трехфазные двигатели с короткозамкнутым и массивным ротором или фазным ротором;
2) двухфазные исполнительные двигатели с короткозамкнутым и полым немагнитным ротором;
3) однофазные двигатели с конденсаторным пуском и с расщепленными или экранированными полюсами.
Асинхронные машины общего назначения применяют главным образом в двух исполнениях: с короткозамкнутым (беличья клетка) и с фазным (с контактными кольцами) ротором. Наибольшее применение имеют трехфазные двигатели, рассчитанные на работу от сети промышленной частоты (50 Гц). Асинхронные двигатели специального назначения для приборов и систем автоматики изготавливаются на повышенные частоты переменного тока (200,400 Гц и более).
 Трехфазные двигатели - имеют три обмотки на статоре, смещенные в пространстве на 120°, соединенных в звезду или треугольник, питание которых осуществляется трех-фазным переменным током. Ротор, обычно, выполняется как короткозамкнутый (беличья клетка) или фазный (с контактными кольцами).
Трехфазные двигатели - имеют три обмотки на статоре, смещенные в пространстве на 120°, соединенных в звезду или треугольник, питание которых осуществляется трех-фазным переменным током. Ротор, обычно, выполняется как короткозамкнутый (беличья клетка) или фазный (с контактными кольцами).
Двигатель с короткозамкнутым ротором конструктивно проще фазного, надежнее в работе, дешевле, имеет лучшие значения cos. j и кпд, но пусковые характеристики у него хуже.
При включении обмоток статора в сеть трехфазного тока, в машине возникает вращающееся магнитное поле, угловая скорость вращения которого определяется выражением
 , (6.1)
, (6.1)
где f - частота питающей сети,
p – число пар полюсов.
 Это поле, сцепляясь с обмоткой якоря, наводит в ней ЭДС. При этом в стержнях обмотки ротора появятся токи. В результате взаимодействия этих токов с вращающимся магнитным полем на роторе возникают электромагнитные силы. Совокупность этих сил создает электромагнитный вращающий момент, под действием которого ротор приходит во вращение с угловой скоростью w2<w1 в сторону вращения поля статора. Т.е. между обмотками статора и ротора, как и в трансформаторе между первичной и втори-чной обмотками, существует только магнит-ная связь, разница лишь в том, что ротор вращается. Если w2=w1 и направления вращения совпадают, то электромагнитного взаимо-действия между статором и ротором не произойдет, так как проводники ротора не будут пересекаться магнитными силовы-ми линиями вращающегося поля статора, а, следовательно, ЭДС в роторе будет равна нулю.
Это поле, сцепляясь с обмоткой якоря, наводит в ней ЭДС. При этом в стержнях обмотки ротора появятся токи. В результате взаимодействия этих токов с вращающимся магнитным полем на роторе возникают электромагнитные силы. Совокупность этих сил создает электромагнитный вращающий момент, под действием которого ротор приходит во вращение с угловой скоростью w2<w1 в сторону вращения поля статора. Т.е. между обмотками статора и ротора, как и в трансформаторе между первичной и втори-чной обмотками, существует только магнит-ная связь, разница лишь в том, что ротор вращается. Если w2=w1 и направления вращения совпадают, то электромагнитного взаимо-действия между статором и ротором не произойдет, так как проводники ротора не будут пересекаться магнитными силовы-ми линиями вращающегося поля статора, а, следовательно, ЭДС в роторе будет равна нулю.
Непременным условием взаимодействия статора и ротора асин-хронной машины является наличие разности скоростей вращения w1-w2.
Величина, которая характеризует эту разность, называется скольжением и определяется по формуле
 . (6.2)
. (6.2)
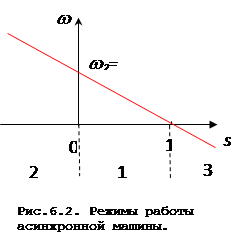
В зависимости от соотношения w2 и w1 различают три режима работы:
1) двигательный режим, когда w2<w1 и направлены в одну сторону,
при этом величина скольжения может принимать значения в пределах 0 < s £ 1;
2) генераторный режим w2>w1 и направлены в одну сторону –
-¥ < s < 0;
3) в режиме торможения противовключением, когда w2<w1 и направлены они в разные стороны - 1 < s < +¥.
Двухфазные двигатели - двигатели малой мощности используются в системах автоматики. Имеют на статоре две обмотки - управления и возбуждения, занимающие одинаковое число пазов и сдвинутые в пространстве относительно друг друга на 90 эл.градусов. Питание двигателей осуществляется от однофазной сети частотой 50 или 400 Гц, при этом для обеспечения их работы нужно, чтобы токи в обмотках были сдвинуты на угол приближающийся к 90 градусам. В этом случае будет возникать круговое вращающееся магнитное поле. На практике этот сдвиг фаз создается искусственным путем, обычно за счет включения конденсаторов. Работа такого двигателя ни чем не отличается от трехфазного. Двухфазные двигатели изготавливаются в нескольких исполнениях: с короткозамкнутым ротором, с полым немагнитным ротором и с полым магнитным ротором. В первом случае ротор снабжен "беличьей клеткой", во втором - ротор представляет собой стакан, выполненный из сплава алюминия, внутри которого находится сердечник из шихтованной стали - служит для уменьшения воздушного зазора и магнитного сопротивления пути, по которому замыкается магнитный поток. Третий тип используется сравнительно редко так как, уступает по характеристикам предыдущим двум, ротор выполняется в виде стального цилиндра с толщиной стенки в несколько мм, а его поверхность, обычно, для уменьшения электрического сопротивления, омедняется. Регулирование скорости вращения двигателя осуществляется изменением значения или фазы тока в обмотке управления. При изменении фазы на 180 градусов происходит реверс двигателя.
Однофазные двигатели - по своему устройству аналогичны трехфазным и состоят из статора, в пазах которого уложена однофазная обмотка и короткозамкнутого ротора. Особенность их работы заключается в том, что при включении однофазной обмотки в сеть переменного тока МДС статора создает не вращающийся, а пульсирующий магнитный поток с амплитудой Фmax, изменяющийся от + Фmax до - Фmax. При этом ось магнитного потока остается неподвижной в пространстве. Для объяснения принципа действия пульсирующий поток можно разложить на два потока, вращающихся со скоростью w1 в противоположные стороны. При неподвижном роторе каждое поле наводит в нем равные токи. В результате взаимодействия этих токов с наводящими их потоками возникают два одинаковых с разными знаками момента. Разность моментов создает результирующий вращающий момент, при s=1 он равен нулю и ротор не приходит во вращение. Отсутствие пускового момента является основным недостатком такого двигателя. Если ротор привести во вращение в каком-либо направлении, разность моментов станет отличной от нуля, s уменьшится и двигатель начнет сам вращаться. На практике пуск однофазных двигателей осуществляется с помощью вспомогательной обмотки, которая укладывается на статоре под углом 90 градусов, токи в обмотках сдвинуты также на 90 градусов за счет включения конденсаторов. Таким образом, при пуске двигатель становится двухфазным, а затем пусковая обмотка отключается и он работает как однофазный.
Характеристики асинхронных двигателей
Механические характеристики представляют собой зависимости угловой скорости вращения от электромагнитного момента w2=f (М) или момента от угловой скорости М=f(w2), часто удобнее использовать зависимости момента от скольжения М=f(s) или от относительной скорости вращения М=f(n), n=w2/w1. Их вид представлен на рис.6.3
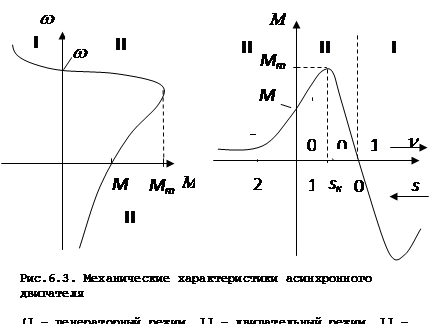 Судя по механической характеристике, максимум электро-магнитного момента достигается при скорости вращения ротора двигателя w2= (0,8¸0,9)w1, при w2=w1 электромагнитный момент равен нулю, а пусковой момент при w2=0 составляет Мп=(0,3¸0,7)Мmax. При достижении электромагнитным моментом максимального значения наступает предел устойчивости работы асинхронного двигателя, так как только на участке, где 0<s<sкр, изменение нагрузки на валу двигателя сопровождается соответствующим изменением электромагнитного момента. Работа асинхронного двигателя становится неустойчивой при скольжениях s>sкр . Так, при максимальном электромагнитном моменте и s=sкр любое незначительное увеличение нагрузочного момента приводит к увеличению скольжения и уменьшению электромагнитного момента и этот процесс будет повторятся до полной остановки ротора двигателя. Следовательно, для устойчивой работы двигателя необходимо, чтобы сумма нагрузочных моментов, действующих на ротор, была меньше максимального момента. Характеристикой надежности работы двигателя в условиях случайных кратковременных перегрузок, является перегрузочная способность l. Она определяется отношением максимального момента к номинальному (l=Мmax/Mн) и для большинства асинхронных двигателей составляет l=1,7¸2,5.
Судя по механической характеристике, максимум электро-магнитного момента достигается при скорости вращения ротора двигателя w2= (0,8¸0,9)w1, при w2=w1 электромагнитный момент равен нулю, а пусковой момент при w2=0 составляет Мп=(0,3¸0,7)Мmax. При достижении электромагнитным моментом максимального значения наступает предел устойчивости работы асинхронного двигателя, так как только на участке, где 0<s<sкр, изменение нагрузки на валу двигателя сопровождается соответствующим изменением электромагнитного момента. Работа асинхронного двигателя становится неустойчивой при скольжениях s>sкр . Так, при максимальном электромагнитном моменте и s=sкр любое незначительное увеличение нагрузочного момента приводит к увеличению скольжения и уменьшению электромагнитного момента и этот процесс будет повторятся до полной остановки ротора двигателя. Следовательно, для устойчивой работы двигателя необходимо, чтобы сумма нагрузочных моментов, действующих на ротор, была меньше максимального момента. Характеристикой надежности работы двигателя в условиях случайных кратковременных перегрузок, является перегрузочная способность l. Она определяется отношением максимального момента к номинальному (l=Мmax/Mн) и для большинства асинхронных двигателей составляет l=1,7¸2,5.
Точные аналитические описания механических характеристик представляют сложные выражения, в которых учитываются многие электрические параметры двигателей. На практике используют приближенное выражение вида
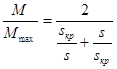 , (6.3)
, (6.3)
где sкр - критическое скольжение, при котором момент имеет максимальное значение.
В основу данного выражения положено допущение, что активное сопротивление обмотки статора равно нулю, а критическое скольжение
определяется по формуле
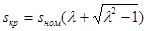 . (6.4)
. (6.4)
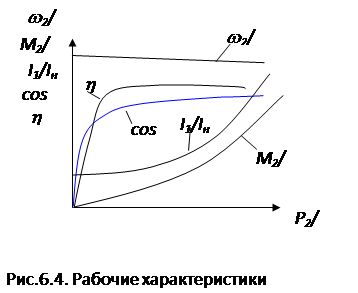
Рабочие характеристики асинхронного двигателя представляют собой зависимости скорости вращения, кпд h, полезного момента М2 на валу двигателя, коэффициента мощности cos j1 и тока статора I1 от полезной мощности Р2 при U1=const и w1=const. Их определяют экспериментально или путем расчета по схемам замещения. Рабочие характеристики строят только для зоны устойчивой работы двигателя, т.е. до скольжения (1,1¸1,2)sном. Примерный вид характеристик в отноительных единицах приведен на рис.6.4.
3. Режимы работы АД
Пусковые свойства двигателей оцениваются значениями пусковых токов и моментов. Считается, что двигатель обладает хорошими пусковыми свой-ствами, если развивает значительный пусковой момент при сравнительно небольшом пусковом токе, но это не всегда возможно.
На практике используют три способа пуска:
1) прямой пуск (непосредственное подключение обмотки статора к сети);
2) пуск при пониженном напряжении;
3) пуск с подключением пускового реостата к обмотке ротора (для двигателей с фазным ротором).
Прямой пуск применяется для двигателей с коротко-замкнутым ротором. Двигатель обычно подключается к сети с помощью электромагнитного пускателя и разгоняется автома-тически по естественной механи-ческой характеристике. К числу недостатков данного способа пуска относят небольшой пусковой момент и большой бросок пускового тока, в пять - семь раз превышающий номинальный.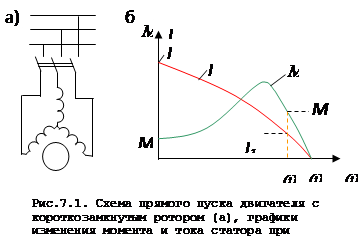
Пуск при пониженном напряжении применяется для двигателей с короткозамкнутым ротором большой и средней мощности при недостаточно мощных электрических цепях. При снижении напряжения на статоре пропорционально уменьшается пусковой ток. Существует три основных способа реализации данного метода: 1) переключение обмоток на специальную пусковую схему; 2) включением в цепь обмоток статора на период пуска добавочных активных или реактивных сопротивлений; 3) подключением двигателя к сети через понижающий автотрансформатор.
 Первый способ применяется для асинхронных двигателей, работающих при соединении обмоток статора треугольником. В этом случае пуск осуществляется переключением обмоток с треугольника на звезду. В момент подключения двигателя к сети переключатель ставят в положение "звезда" и фазное напряжение понижается в
Первый способ применяется для асинхронных двигателей, работающих при соединении обмоток статора треугольником. В этом случае пуск осуществляется переключением обмоток с треугольника на звезду. В момент подключения двигателя к сети переключатель ставят в положение "звезда" и фазное напряжение понижается в  раза. Во столько же раз уменьшается и ток в обмотках статора.
раза. Во столько же раз уменьшается и ток в обмотках статора.
После того как ротор двигателя разгонится до скорости близкой к номинальной, переключатель переводится в положение "треугольник".
Недостатком данного способа является то, что уменьшение фазного напряжения в раза сопровождается уменьшением пускового момента в три раза, так как пусковой момент асинхронного двигателя прямо-пропорционален квадрату напряжения. Данный способ неприменим, в силу указанного недостатка, в тех случаях, когда на валу двигателя при пуске имеется значительная нагрузка.
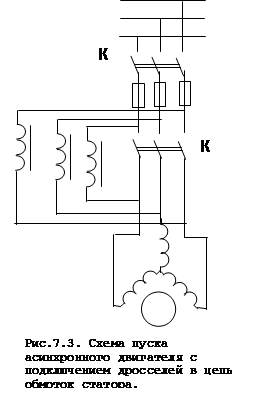 Второй способ заключается в том, что в момент пуска напряжение на обмотки двигателя подается через дроссели или активные сопротивления. При этом напряжение на обмотке статора будет снижено на величину падения напряжения на дросселе. Схема включения приведена на рис.7.3. В первый момент перек-лючатель К2 разомкнут. При замыкании К1 ток из сети поступает на обмотки статора через дроссели. После разгона двигателя К2 замыкают инапряжение на обмотках двигателя становится номинальным.
Второй способ заключается в том, что в момент пуска напряжение на обмотки двигателя подается через дроссели или активные сопротивления. При этом напряжение на обмотке статора будет снижено на величину падения напряжения на дросселе. Схема включения приведена на рис.7.3. В первый момент перек-лючатель К2 разомкнут. При замыкании К1 ток из сети поступает на обмотки статора через дроссели. После разгона двигателя К2 замыкают инапряжение на обмотках двигателя становится номинальным.
Недостаток метода в снижении пускового момента.
При пуске двигателя через понижа-ющий автотрансформатор имеется возмож-ность снизить напряжение в k раз, где k - коэффициент трансформации. После разгона двигателя автотрансформатор отклю-чается, а двигатель непосредственно подключается к сети. Как и в предыдущих случаях имеет место снижение пускового момента.
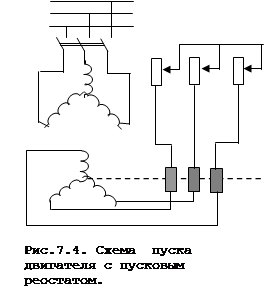 Пуск с подключением пускового реостата применяется для двигателей с фазным ротором. Наличие контактных колец у такого двигателя позволяет под-ключать к обмотке ротора пусковой рео-стат рис.7.4. При увеличении активного сопро-тивления цепи ротора увеличи-вается пусковой момент и скольжение (рис.7.5). Зависимость М= f(s) сдвигается в область больших скольжений, а зависи-мость w2= f (М) в область меньших скоростей вращения, при этом значение максимального момента остается постоянным.
Пуск с подключением пускового реостата применяется для двигателей с фазным ротором. Наличие контактных колец у такого двигателя позволяет под-ключать к обмотке ротора пусковой рео-стат рис.7.4. При увеличении активного сопро-тивления цепи ротора увеличи-вается пусковой момент и скольжение (рис.7.5). Зависимость М= f(s) сдвигается в область больших скольжений, а зависи-мость w2= f (М) в область меньших скоростей вращения, при этом значение максимального момента остается постоянным.
Пусковой реостат, обычно, имеет три - шесть ступеней, что позволяет в процессе пуска постепенно уменьшать пусковое сопротивление, поддер-живая высокое значение пускового момента.
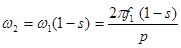
При постепенном ступенчатом уменьшении сопротивления пускового
реостата электромагнитный момент двигателя изменяется от Мпmax до Мпmin,
скорость вращения возрастает по ломанной кривой рис.7.6.
В конце пуска реостат полностью выводят, обмотка ротора замыкается
накоротко, а двигатель переходит на работу 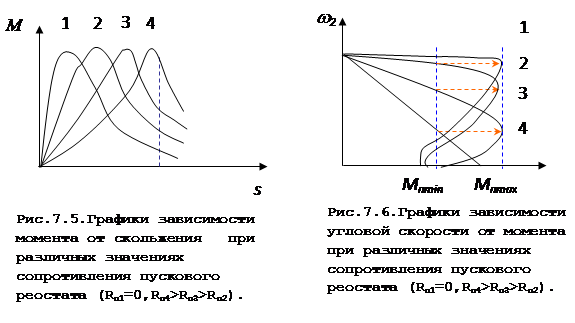 по естественной характеристике.
по естественной характеристике.
Таким образом, посредством реостата, включенного в цепь ротора, можно осуществлять пуск двигателя при постоянном моменте близком к максимальному и резко снизить значение пускового тока. К числу недостатков пусковых свойств двигателей с фазным ротором относят: сложность, продолжительность и неэкономичность пусковой операции.
|
Принципы регулирования скорости вращения асинхронных двигателей могут быть выявлены в результате анализа выражения:
 . (7.1)
. (7.1)
Возможны три метода регулирования скорости:
1) изменением частоты питающего напряжения f1,
2) изменением числа пар полюсов p,
3) изменением величины скольжения.
Частотное регулирование. Данный способ регулирования скорости вращения основан на изменении скорости вращения магнитного поля  .
.
Практически этот вид управления начал развиваться с появлением полупроводниковых приборов, на которых строятся преобразователи частоты. Следует отметить, что в современном электроприводе переменного тока используются преобразователи частоты трех видов:
- с промежуточным звеном постоянного тока и автономным инвертором тока или напряжения;
- непосредственные;
- с широтно-импульсной модуляцией выпрямленного напряжения. Казалось бы, для регулирования скорости достаточно изменить частоту питающего напряжения, но изменение частоты приводит еще и к изменению максимального электромагнитного момента т.к.
 , (7.2)
, (7.2)
а значит и перегрузочной способности, коэффициента мощности,КПД двигателя. Для поддержания их значений на требуемом уровне необходимо одновременно с изменением частоты изменять и напряжение питания. Характер одновременного изменения f1 и U1
зависит от закона изменения момента нагрузки и определяется уравнением
 , (7.3)
, (7.3)
где U1 и M - напряжение и момент при частоте f1;
U' и M ' - напряжение и момент при частоте f1'.
Если регулирование скорости происходит при постоянном моменте нагрузки (M=M'=const), то подводимое к двигателю напряжение необходимо изменять пропорционально изменению частоты:
 . (7.4)
. (7.4)
При этом мощность двигателя увеличивается пропорционально нарастанию скорости вращения. Если же регулирование производится при условии постоянства мощности двигателя (P=Mw1=const), то напряжение следует изменять в соответствии с законом
 . (7.5)
. (7.5)
Кроме описанного метода в современной практике используются методы частотно-токового управления, когда одновременно с изменением частоты формируют ток статора, и векторного управления, при котором регулируют частоту и формируют вектор основного потокосцепления машины [ ].
Частотное регулирование двигателей позволяет плавно изменять скорость вращения в широком диапазоне. К недостаткам способа следует отнести сложность и высокую стоимость преобразователей частоты.
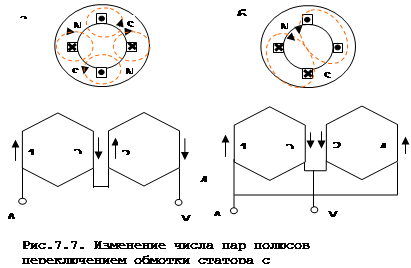
Регулирование скорости вращения изменением числа пар полюсов обмотки статора. Данный способ применяется только для асинхронных двигателей с короткозамкнутым ротором и дает возможность получать ступенчатое изменение скорости вращения. Изменение числа полюсов в обмотке статора можно получить, если на статоре уложена обмотка, конструкция которой позволяет осуществлять ее переключение с последовательного соединения на параллельное. Число полюсов при этом уменьшается в два раза. Принцип преобразования четырехполюсной обмотки в двухполюсную (для одной фазы) поясняется на рис.7.7.
Регулирование скорости вращения изменение величины скольжения. Регулирование скорости вращения изменением скольжения происходит только в нагруженном двигателе. В режиме холостого хода скольжение, а следовательно и скорость вращения остаются практически неизменными.
Скольжение можно изменять следующими способами: а) изменением величины питающего напряжения; б) нарушением симметрии подводимого напряжения питания; в) включением в цепь ротора реостата (только для двигателей с фазным ротором).
Увеличение питающего напряжения при неизменной нагрузки на валу приводит к росту скорости вращения ротора двигателя. Диапазон регулирования скорости ограничен значением критического скольжения, которое остается практически неизменным, и недопустимостью значительного превышения номинального напряжения. Кроме того, при уменьшении напряжения величина максимального момента также уменьшается (рис.7.8) и двигатель утрачивает свою перегрузочную способность. Данный способ, в силу указанных недостатков, применим только для регулирования скорости микродвигателей.
 Нарушение симметрии питающего трехфазного напряжения приводит к тому, что вращающееся магнитное поле становится эллиптическим. В нем появляется обратная составляющая, которая создает электромагнитный момент, направленный встречно враща-ющему моменту. Таким образом с увеличением несимметрии скорость вращения будет уменьшаться.
Нарушение симметрии питающего трехфазного напряжения приводит к тому, что вращающееся магнитное поле становится эллиптическим. В нем появляется обратная составляющая, которая создает электромагнитный момент, направленный встречно враща-ющему моменту. Таким образом с увеличением несимметрии скорость вращения будет уменьшаться.
Практически данный способ осущест-вляется включением в одну из фаз регулировочного автотрансформатора. К числу недостатков относятся: узкая зона регулирования и снижение КПД двигателя. Применяется способ для регулирования скорости двигателей малой мощности.
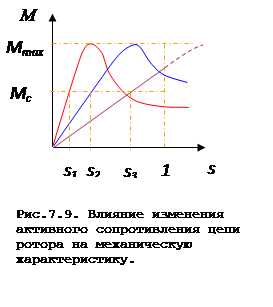
Включение в цепь ротора регулировочного реостата применимо только для двигателей с фазным ротором. При изменении активного сопротивления цепи ротора, изменяется форма механической харак-теристики, причем с увеличением сопротивления некоторому нагрузочному моменту будет соответствовать большая величина скольжения (рис.7.9.). Данный споб позволяет регулировать скорость вращения в широком диапазоне при постоянном максимальном моменте. Недостатки: большие потери энергии в регулировочном реостате и мягкая механическая характеристика при больших значениях сопротивления реостата.
|
|
Дата добавления: 2014-01-07; Просмотров: 1583; Нарушение авторских прав?; Мы поможем в написании вашей работы!