КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Усреднить тангенс наклона касательной на шаге интегрирования
|
|
|
|
можно следующим образом (рис. 3-2). С помощью метода Эйлера находится точка (t k + h, xk + hx′k), лежащая на прямой L1. В этой точке вновь вычисляется тангенс угла наклона касательной (прямая L2). Усреднение тангенсов дает прямую L. Через точку (tk, xk) проводится прямая L, параллельная L, и находится искомая точка (tk+1, xk+1 ).
В этом случае, очевидно, функция Ф [см. (3-7)] запишется как
Ф = 0,5[ f(tk, xk) + f(tk + h, xk + hx′k)], (3-8)
где x'k==f(tk. Xk)-
Можно поступить иначе, определив тангенс наклона касательной в средней точке интервала экстраполяции (шага интегрирования), как это показано на рис. 7-3. В этом случае
Ф = f(tk + 0,5 h, xk + 0,5hx′k). (3-9)
Без вывода приведем формулы, описывающие метод четвертого порядка, один из самых употребительных методов интегрирования дифференциальных уравнений. Этот метод применяется настолько широко, что в литературе по вычислениям на ЦВМ он называется «метод Рунге—Кутта» без всяких указаний на тип или порядок. Этот классический метод Рунге—Кутта описывается системой следующих соотношений:
xk+1 = xk + h(k1 + 2k2 +2k3 +k4)/ 6,
где
k1 = f (t k, x k); k2 = f (tk + 0,5 h, xk + 0,5 h k1); k3 = f(tk + 0,5hk2);
k4 = f(tk + h, xk + hk3).
Данный метод самоначинающий, но один из его недостатков—
сложность оценки локальной ошибки интегрирования -является общим недостатком всех методов Рунге —Кутта. Поэтому при реализации метода с автоматическим выбором шага интегрирования поступают следующим образом. Вычисляют значение искомой функции в каждой точке с полным и с половинным шагом и сравнивают два полученных значения. Если модуль разности между ними окажется меньше некоторого заданного положительного числа, то считается, что интегрировать с данным шагом можно; если же это не так, то шаг делится пополам. Этот метод выбора шага интегрирования приводит к увеличению времени счета как минимум в три раза по сравнению с методом постоянного шага.
|
|
|
Некоторые особенности анализа переходных процессов в электрической системе. Рассмотрим особенности анализа переходных процессов в электрической системе с точки зрения метода решения задачи:
1) численное интегрирование дифференциальных уравнении применяется, как пронзило, при анализе динамической устойчивости системы после короткою замыкания на линии электропередачи или после наброса нагрузки на генераторы системы. При этом в моменты возникновения коротких замыкании и их отключении ряд режимных параметров терпит разрывы первого рода, что приводит к скачкам производных. При использовании многошаговых методов дальней шее интегрирование с использованием предшествующей информации невозможно, т. е. возникает ситуация, подобная начальному этапу интегрирования, а многошаговые методы не являются самоначинающими;
2) порядок системы уравнений, описывающих поведение сложной электрической системы, высок, что, с одной стороны, приводит к естественному увеличению времени счета, а с другой,—к столь же естественному увеличению объема оперативной памяти ЦВМ, нанимаемого программой;
3) переходные процессы в элементах электрической системы различаются но времени протекания (электромеханические, электромагнитные и т, д.), а также по интенсивности изменения режимных параметров, связанной с тем, насколько близок, например, генератор или группа генераторов системы к точке короткого замыкания. Это обстоятельство при численном решении задачи можно было бы использовать с целью сокращения времени счета, выбирая раздельные шаги интегрирования для различных групп уравнений системы.
Таким образом, наиболее целесообразным был бы самоначинающий, быстродействующий_и легко программирующийся метод, позволяющий легко оцепить локальную ошибку интегрирования для каждой интегрируемой переменной и независимо выбрать для них шаг интегрирования.
|
|
|
Метод последовательных интегралов. При исследовании динамической устойчивости электрических систем применяется простой метод интегрирования дифференциальных уравнений, дающий удовлетворительную точность решения.
Пусть необходимо проинтегрировать систему дифференциальных уравнений следующего вида:
TJ I d2δi/dt2 = PT i -- PЭi, (5—10) где
Рэi = yii E2i sin αii -- ∑ yimEi Em sin (δi –δm –αim), i=l, 2,..., η.
От системы n уравнений второго порядка (7-10) можно перейти к системе 2п уравнении первого порядка
dδ / dt = ωi; TJ dω/ dt = PTi -- PЭi. (5-11)
Предположим, что в системе происходит короткое замыкание. Тогда, если в исходном режиме δi = δi 0 , ω = 0, ΔP = 0 для каждого генератора, то после короткого замыкания ΔР не равно О. При этом изменяются и значения проводимостей схемы, а следовательно, и значения Рэ и ΔР==Рг—,Рэ. Обозначая ускорение ротора i-го генератора через α=ΔP/ΤJ и считая его постоянным, запишем приращение угла генератора ηа первом шаге интегрирования h
Δδi.= 0,5α0h2.
Применяя для каждого генератора формулу δι=δο+Δδι, найдем значения углов δ к началу второго шага интегрирования. Очевидно, что ко второму шагу интегрирования ω не равна нулю. Приращение ω на первом шаге интегрирования определим по среднему ускорению генератора, т. е. по формуле
Δω1 == 0,5h (α1+ α0),
где α = ΔP1 / TJ..
| k-ι ••Σ s=l |
Для второго интервала
Δδ = Δω1h + 0,5 α1h2.
Таким образом, интегрирование для всех последующих интервалов производится по формулам:
ωk = ωk—1 + 0,5h (αk + αk—1); (3—12)
δk+1 = δk + ωk h + 0,5αk h2, (3—13)
т.е. это метод второго порядка, однако в отличие от метода Рунге – Кутта того же порядка, не требуется дважды пересчитывать правые части исходной системы уравнений при определении приращений искомых переменных на шаге интегрирования.
Последние выражения можно преобразовать к более удобному для вычислений виду:
ωk = h/2∑(αS + αS—1) = 0,5αkh + h∑ αs + 0,5 α0h;
δk+1 = δk + h2 ∑αs + 0,5α0 h2. (5—14)
|
|
|
Очевидно, что
δk = δk---1 + Δδk = δk—1 + h2∑ αs + 0,5α0h2,
и Δδk = h2 ∑αs + 0,5α0 h2
Следовательно, (5-14) можно переписать:
δk +1= δk + Δδk + αkh2.
Δδk+ 1 = Δδk+ αkh2;
δk+1= δk + Δδk+1;
αk = 18000ΔPk/TJ,
где углы δ измеряются в электрических градусах, время интегрирования и постоянная инерции TJ—в секундах, небаланс мощности Δρ—в относительных единицах. Алгоритм метода следующий;
1/Установить m = 1 2/ Определить константу k = (18000/Tj} h2.
3.ВычислитьΔΡ0= Рт-Рэ (Пункты 1 – 5 выполняются однократно)
| вы-одно- |
4. Определить Δδ1==0,5kΔΡο.
| кратно |
5. Найти δ1=δ0 + Δδ1
6. Вычислить ΔРm=РT—Рэ.
7. Определить Δδm+ 1=Δδm +kΔPm.
8. Найти δm+1 = δm+ δm+ Δδm+1.
9. Увеличить m на единицу {m — >m+ 1}.
10. Если mh не больше заданного времени интегрирования, то перейти к п. 6, если mh больше, то счет оканчивается.
Данный алгоритм справедлив как во время короткого замыкания, так и после его ликвидации. Однако непосредственно в момент отключения ускорение α претерпевает разрыв первого рода, поэтому п. 6 алгоритма для моментов коммутаций следует изменить и определить небаланс мощности по формуле
ΔΡm=0,5(ΔΡm + +ΔΡM-),
где индекс «+» свидетельствует о том, что ΔΡ необходимо вычислить при послеаварийных значениях проводимостей у, а «_» о том, что значения проводимостей отвечают аварийному состоянию в системе (короткое замыкание).
Данный метод можно использовать и в тех случаях, когда исследуется устойчивость регулируемой системы с учетом изменения ЭДС генераторов. Однако в этом случае он уже не является методом второго порядка, так как «новые» значения ЭДС определяются по формуле Эйлера.
Среднеиитервальный метод. Этот метод относится к методам прогноза и коррекции первого порядка. Вообще говоря, методы прогноза и коррекции не являются самоначииающими, за исключением методов первого порядка, поэтому данным методом можно начать решение.
Для прогноза в данном методе используется формула Эйлера
|
|
|
xk+1 = xk + hf (tk,xk),
с помощью которой грубо экстраполируется значение искомой функции на шаге интегрирования. Локальная ошибка данного метода велика и задача состоит в том, чтобы скорректировать ее, Для коррекции используется следующая формула второго порядка (заметим, что в ней верхние индексы указывают на порядок итерационного приближения решения, а нижние—на интервал интегрирования):
x(m+1)k+1 = xk+ 0,5h[ f(tk,xk ) + x′k +1], (3-15)
где x′k+1 = f(t k + h, xmk+1).
Данный метод имеет сходство с методом Рунге—Кутта второго порядка. Однако при использовании метода Рунге—Кутта формула (5-15) применяется во всех случаях один раз, а при использовании данного метода корректировка проводится до тех пор, пока не выполнится условие
[ xm+1k+1 -- xmk+1 ] ‹ έ (3-16)
где ε—заданная положительная величина.
В данном методе в зависимости от того, сколько итераций необходимо сделать для выполнения условия (5-16), можно выбирать шаг интегрирования: если этих итераций много—шаг следует уменьшить, если итерация одна, то шаг можно увеличить.
3-2. ПОНЯТИЯ КАЧЕСТВЕННЫХ ХАРАКТЕРИСТИК ДЛЯ ВОЗМОЖНЫХ ВИДОВ ДВИЖЕНИЯ НЕЛИНЕЙНОЙ СИСТЕМЫ
Несмотря на широкое применение компъюторов, расширяющее возможности построения переходных процессов с помощью численных методов, актуальным является использование простых, приближенных методов исследования нелинейных дифференциальных уравнений. Приближенные методы особенно ценны, когда они приводят к аналитической форме решения, позволяющей получить важные практические рекомендации более общего характера, имеющие силу не только для данной конкретной системы, но и для целого класса аналогичных систем. Приближенная оценка основных динамических свойств нелинейной системы позволяет наметить пути последующего применения вычислительных машин. Эти соображения являются особенно важными при исследовании нелинейных дифференциальных уравнений, описывающих электрическую систему.
Характерные особенности регулируемой электрической системы— возможность существования нескольких состоянии равновесия, наличие разных видов движения и, в частности, периодических движений—устойчивых и неустойчивых предельных циклов. Дадим наглядную иллюстрацию на фазовой плоскости (в координатах отклонения и первой производной переменной) качественных особенностей возможных видов движений в нелинейной электрической системе.
Рассмотрим понятие фазовой плоскости для системы, движение которой описывается уравнением второго порядка
d2.x./ dt2 + ω02 x = 0. (3-17)
Состояние системы в данный момент времени t 0 определяется двумя координатами:
(x)t = t0 = x0; (dx/dt) t =t0 = (dx/dt)0.


|
Примем величины x и y = dx/dt в качестве декартовых координат на плоскости (рис. 3-4). Точка.М на плоскости, имеющая координаты x0 и (dx/dt)0 будет соответствовать некоторому состоянию системы, движение которой описывается уравнением (5-17). Точка М, положение которой полностью характеризуется состоянием системы, называется изображающей точкой, а плоскость (.x, dx/dt} — фазовой плоскостью. При движении системы ее состояние изменяется и изображающая точка М, находящаяся в начальный момент времени t==t0 в положении М0, описывает некоторую кривую (см. рис. 5-4), которая называется траекторией изображающей точки на фазовой плоскости. Запишем решение уравнения (3-17)
x = A sin (ω0 t + φ). (3-18)
Здесь А и φ—постоянные, определяемые из начальных условий.
Дифференцируя выражение (3-18), находим
у = dx/dt = Αώo cos (ωo t + φ). (3-19)
Исключая величину ωot +φ из (3-18) и (3-19), получаем уравнение
x2/A2 + y2/ (A2ωo2 ) = 1,
представляющее собой уравнение эллипса с полуосями A и ωo Α.
Итак, если система находится в движении, описываемом уравнением (5-17), то изображающая точка движется по эллипсу (рис. 5-5). При этом время нигде не отображено на фазовой плоскости и можно лишь представить себе, что с течением времени изображающая точка Μ будет двигаться по траектории в направлении, указанном стрелкой. При других начальных условиях частное решение уравнения (5-17) дает другую траекторию, например траекторию, на которой находится точка N.
Две траектории не могут пересечься, так как после пересечения последующее движение становится неоднозначно определенным. Между тем любая реальная система при определенных заданиях
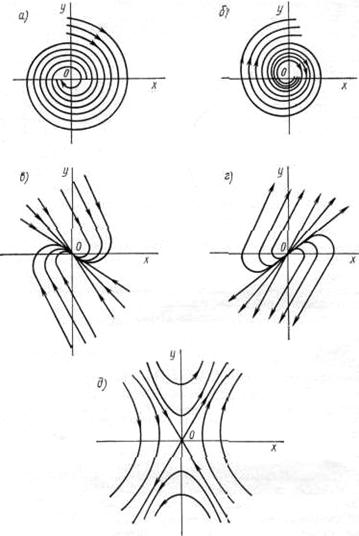
Рис. 3-6
н ачальных условий имеет лишь одно определенное движение, а не 'два или более «возможных» движений. Исключение составляют особые точки на фазовой плоскости, соответствующие состояниям равновесия системы. В нелинейной системе может быть несколько состояний равновесия.
Так, в нелинейной системе, описываемой уравнением второго порядка
d2x/dt2 + 2βdx/dt + ωo2 sin x = ωo2 sin xo,
может быть два состояния равновесия, определяемые как sinx= sin xo,
где х==xo и х=л – xo.
Первое состояние равновесия (2β)2 < ωо 2 называется устойчивым
фокусом (рис. 3-6, а).
Второе неустойчивое состояние равновесия называется седлом (рис. 3-6. д). На рис. 3-6, б, в, г приведены и другие возможные
|
 a
a
Рис. 3-7
особые точки- неустойчивый фокус, устойчивый узел и неустойчивый узел соответственно.
Исследуя характер движения нелинейной системы на фазовой плоскости для распознания всей картины траекторий, т. е. так называемый фазовый портрет системы, необходимо уделить особое внимание особым траекториям. Заметим, что точки равновесия являются частными случаями особых траекторий.
Периодические движения, при которых через каждый период времени Т исходное состояние системы повторяется, представляются замкнутыми фазовыми траекториями. В консервативных системах кривые, соседние с периодической кривой, обычно также периодические. Характерной картиной при существовании периодических движений в консервативной системе является совокупность замкнутых траекторий, «вложенных» одна в другую (см. рис. 3-5). Нет никаких оснований назвать какую-либо из этих траекторий особой. Однако в неконсервативных системах замкнутые траектории имеют принципиально другое значсние. Здесь существуют только изолированные замкнутые траектории, представляющие собой особые траектории, называемые предельным циклом.
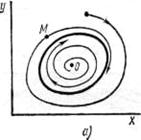
На рис. 3-7, а, б приведены примеры устойчивого и неустойчивого предельных циклов. Начальная точка М, лежащая в области,
окружающей устойчивый предельный цикл (внутри или снаружи его), с течением времени переходит на траекторию предельного цикла, и в системе устанавливаются периодические движения, называемые автоколебаниями,
Малое отклонение начальной точки, лежащей вокруг или на самом неустойчивом предельном цикле (рис. 5-7. б) приводит к удалению движения системы от периодического. Поэтому движение но неустойчивому предельному циклу физически нереализуемо. Устойчивые и неустойчивые предельные циклы служат «водоразделами»,
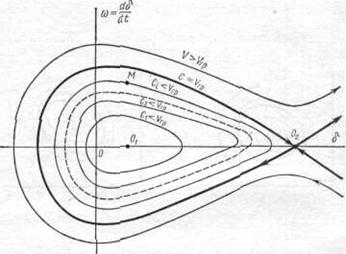
Рис. 3.8
отделяющими область с одним типом траекторий («разматывающиеся») от области с другим типом траекторий («сматывающиеся»». В неконсервативной системе имеется обычно конечное число предельных циклов.
При достаточно большом удалении от окрестности седла «усы» также служат «водоразделами» между движениями различного характера и называются сепаратрисами (кривая С =Vгр на рис. 3-8). Особые траектории— точки равновесия, сепаратрисы, предельные циклы разбивают всю фазовую плоскость на ряд областей, которые определяют полную качественную характеристику всех возможных видов движения системы. Для электрической системы с устройствами автоматического регулирования характерны все описанные виды особых траекторий. Сепаратриса разделяет затухающие периодические движения и расходящиеся апериодические движения. Она имеет важное техническое значение, так как область начальных условий, находящихся внутри сепаратрисы, определяет условия устойчивости после больших возмущений (динамической устойчивости электрической системы).
3-3. НАХОЖДЕНИЕ ДОСТАТОЧНЫХ УСЛОВИЙ УСТОЙЧИВОСТИ ПРИ БОЛЬШИХ ВОЗМУЩЕНИЯХ С ПОМОЩЬЮ ПРЯМОГО (ВТОРОГО) МЕТОДА ЛЯПУНОВА
Для определения устойчивости после больших возмущений (динамической устойчивости электрической системы) необходимо знать совокупность начальных отклонений параметров режима и их производных, при которых система вернется в положение равновесия (область устойчивости). Эта совокупность ограничена в фазовом пространстве сепаратрисной поверхностью. Для отыскания поверхности, лежащей внутри области устойчивости и приближающейся к сепаратрисной поверхности, можно применить прямой (второй) метод Ляпунова, заключающийся в следующем. Обобщив известное положение физики (равновесное положение устойчиво, если в нем потенциальная энергия имеет минимум), Ляпунов предложил находить при выводе условий устойчивости вспомогательную функцию координат хi изображающей точки в фазовом пространстве V{xi)- Эта функция должна быть однозначна, дифференцируема, определенно положительна вне положения равновесия и обращаться в нуль в положении равновесия.
|
Если удается подобрать такую функцию V, что при любом движении системы она уменьшается, т. е. dV/dt < 0, то система оказывается «устойчивой в большом».
Примером функции Ляпунова может служить функция
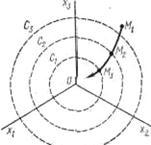
v = x12 + x22 +x32.
В этом случае поверхность V =С в фазовом пространстве (рис. 5-9) есть сфера. Поверхности V=C, построенные для различных значений С(С1, C2, С3), не пересекаются, так как — V --
Рис. 3-9
однозначная функция координат. Поэтому семейство представляет собой вложенные одна в другую замкнутые поверхности, причем поверхность с меньшим С вложена в поверхность с большим С. Поверхность V=С при С— >0 стремится к точке равновесия О.
Пусть в какой-либо момент времени изображающая точка М1 (рис. 5-9) находится на поверхности V › C3; если при движении системы производная dV/di < 0, то с течением времени изображающая точка перемещается к поверхности V =С2 , где С2< С3. Следовательно, фазовая траектория пронизывает вторую поверхность, лежащую внутри первой. Если изображающая точка при движении пронизывает поверхности семейства в направлении снаружи внутрь и с течением времени неограниченно приближается к точке равновесия, то выполняются достаточные условия устойчивости в большом. Однако условие dV/dt < 0 не является необходимым признаком устойчивости, так как могут существовать
фазовые траектории, идущие от внутренних поверхностей к наружным, но направляющиеся к особой траектории, например устойчивому предельному циклу.
Недостатки прямого метода Ляпунова—отсутствие общих приемов
отыскания функции Ляпунова и невозможность оценки, насколько достаточные условия устойчивости в большом (Сi < Vгр, рис, 5-8) уже, чем необходимые условия устойчивости, определяемые сепаратрисой С=Vгр· Одно из достоинств метода Ляпунова—сокращение времени численного счета переходных процессов после приложения большого возмущения для определения динамической устойчивости.
Численными методами рассчитывается переходный процесс от момента приложения до момента снятия возмущающей силы (например, такая кратковременная аварийная ситуация, как короткое замыкание в электрической системе, длится 0,1—0,4с).
Если значения переменных послеаварийного режима, определенные в конце аварийной ситуации, находятся внутри фазовой плоскости, ограниченной предварительно построенной функцией Ляпунова, то система устойчива в большом (или динамически устойчива).
Пример 3-1. Найти прямым методом Ляпунова условия устойчивости в большом электрической системы, представленном схемой «станция - шины».
Запишем нелинейное дифференциальное уравнение движения синхронной машины, соединенной с системой, в простейшей (консервативной) идеализации:
dδ/dt=ω; dω/dt=Po/TJ—[EU/{xTJ)] sinδ. (3-20) Введем обозначения:
A=Po /TJ; b=eu/(x tJ).
Найдем функцию Ляпунова. Для электрической системы в консервативной идеализации при выборе функции Ляпунова используем энергетический подход, Функцию Ляпунова запишем в виде первого интеграла движения синхронной машины—интеграла энергии. Разделив второе уравнение (5-20) на первое,получим
(dω/dt)(dδ/df) = (A—Bsinδ)/ ω (5-21)
Разделяя переменные и интегрируя уравнение (5-21), найдем
0,5ω2 – Аδ – В cos δ = C. (5-22)
Выражение (5-22) характеризует полную энергию системы (5-20). состоящую из кинетической Ο.5ω2 и потенциальной Aδ + B cos δ. Траектории рассмотренной электрической системы на фазовой плоскости [δ, ω] являются контурами (кривые Ci на рис. 5-8) постоянной полной энергии. Изменение полной энергии по времени запишем как
dC/dt = (дС/дω) (dω/dt) + (дС/дδ) (dδ/dt).
Используя (3-22) и (3-20), найдем
dC/dt=ω(A—B sinδ)—Aω)+Bωsinδ=0. (3-23)
Следующий из (3-23) вывод о равенстве нулю изменения полной энергии в контуре С физически означает, что система, переведенная в результате какого-либо возмущения из точки 0 в точку М, лежащую на траектории со значением Сi (рис. 3-8), будет совершать движение по этой траектории. Если эта траектория замкнутая, то движение будет устойчивым. Так как функция (3-22) знакоопределенная, то ее можно принять за функцию Ляпунова, поскольку она удовлетворяет требованиям, предъявляемым к функциям этого класса, а именно:
1) V (δ, ω) > О в некоторой области вокруг начала координат, совмещенного с устойчивым положением равновесия;
2) dV/dt > 0 во всем пространстве.
Областью устойчивости системы (3-20) является часть окружающего начало координат пространства,ограниченного самой большой замкнутой поверхностью C ==Vrp. соответствующей граничному значению функции Ляпунова. Эта граничная—сепаратрисная—поверхность проходит через седловую точку (точка О2 на рис. 5-8), которую необходимо определить.
Как известно, особые точки находятся приравниванием нулю правых частей исходных дифференциальных уравнений переходного процесса (5-20):
ω=0; A -- Bsinδ=0; δо=arcsin {А/В).
При А < В имеется два положения равновесия—центр Ο1 [δо, 0] и седло О2 [π—δо, О) (рис. 5-8).
Замкнутая часть сепаратрисной поверхности Vrp, проходящей через седло, определяет область устойчивости системы в большом Критерий устойчивости математически запишется как V = Vгр,
3-4. ИССЛЕДОВАНИЯ ПЕРИОДИЧЕСКИХ РЕШЕНИЙ С ПОМОЩЬЮ ГАРМОНИЧЕСКОЙ ЛИНЕАРИЗАЦИИ НЕЛИНЕЙНОСТЕЙ
Построение длительных колебательных процессов численными методами решения нелинейных дифференциальных уравнений может дать большую ошибку; кроме того, при этом невозможно получить какие-либо общие закономерности. Эти обстоятельства заставляют искать особые приемы для приближенного определения периодических решений нелинейных дифференциальных уравнений, характерных для синхронных машин в электрической системе. В этих приемах используется разложение нелинейности в ряд Фурье при отыскании периодических решений и совокупного решения уравнений для каждой гармоники (метод гармонического баланса).
В случаях, когда амплитуды колебаний высших гармоник по отношению к первой малы и когда в ряду Фурье можно оставить только постоянные составляющие и первые гармоники, метод гармонического баланса превращается в метод гармонической линеаризации. Заметим, что условиями малости составляющих высших гармоник выполняются, если система обладает свойством фильтра. Объект исследования электрической системы—синхронная машина—обладает свойством фильтра тем сильнее, чем меньше ее демпфирование (амплитудно-частотная характеристика колебательной системы имеет резко выраженный резонанс, см, рис. 3-23). Цель метода гармонической линеаризации состоит в том, чтобы вычислять параметры колебательного процесса—координаты средней точки колебаний (постоянные составляющие), максимальные отклонения от нее (амплитуды первой гармоники), время одного полного колебания, период или частоту. Однако предварительно нужно определить, будет ли процесс при данных параметрах системы, данном внешнем воздействии и данных начальных условиях колебательным или монотонным. Иными словами, надо найти границы существования периодических решений. Для синхронной машины, работающей в электрической системе, синхронные колебания ограничиваются условиями
динамической устойчивости. При некоторых начальных условиях и внешних возмущениях, приводящих к нарушению динамической устойчивости, периодические решения (синхронные качания роторов синхронной машины) уже не существуют. Чтобы периодическое движение реально существовало, необходимо выполнение не только условия существования, но и условия устойчивости. Условия устойчивости установившихся периодических движений в регулируемых электрических системах делят периодические границы областей статической устойчивости на опасные и безопасные участки.
Пример 5-2. Определить максимально допустимую амплитуду колебаний нелинейной колебательной системы, превышение которой приводит к неустойчивости в большом. Применительно к синхронной машине, работающей параллельно с электрический системой, появление колебания ротора (либо свободного—вследствие начального возмущения, либо вынужденного—вследствие внешней гармонической силы) с амплитудой выше критической oзначает нарушение синхронной динамической устойчивости, т, е. неустойчивости в большом. Определение максимально допустимых амплитуд колебаний, таким образом, является практически важной задачей для электрической системы.
Нелинейное дифференциальное уравнение, описывающее в некоторой идеализации электромеханические переходные процессы простейшей электрической системы, имеет вид:
d2 δ/dt2 + β dδ/dt + ωo2 sin δ = F(t).
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 390; Нарушение авторских прав?; Мы поможем в написании вашей работы!