КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Передающие устройства РЛС вс
СТРУКТУРНАЯ СХЕМА, ПРИНЦИП ДЕЙСТВИЯ И ТАКТИКО-ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ РЛС
Существует несколько вариантов построения структурной схемы первичной РЛС третьего поколения. Ниже рассматривается один из возможных вариантов, в котором используются современным достижения науки и техники. В качестве систем-аналогов выбраны отечественные РЛС «Скала-М», «Скала-МПР» и «Скала-МПА». Особенности построения зарубежных РЛС АТСR-22, АТСR-44 обсуждаются в данной главе в плане сравнения с отечественными РЛС. Различия в.построении трассовых и аэродромных РЛС поясняются по мере необходимости/
На рис. 1.1 приведена структурная схема первичной импульсной РЛС кругового обзора. Главными особенностями этой схемы являются:
· применение двух приемопередающих каналов с разносом частот;
· применение двулучевой диаграмма направленности антенны в вертикальной плоскости на прием отраженных от целей сигналов;
· применение истинно-когерентного метода селекции движущихся целей.
Первая особенность РЛС связана, с применением одного из методов повышения ее энергетического потенциала метода разноса частот, который заключается в следующем. Два передатчика А и В работают одновременно
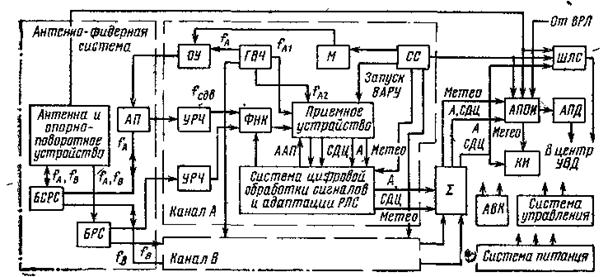
Рис 1.1. Структурная схема первичной РЛС
на общую антенну в режиме импульсной модуляции с различными несущими частотами Fа и Fв зондирующих радиоимпульсов. Между этими радиоимпульсами имеет место небольшой временной сдвиг, который составляет обычно 4 -6 мкс. Разнос по частоте не превышает 40 -60 МГц. Отраженные от цели сигналы с разными частотами разделяются с помощью СВЧ фильтров и усиливаются двумя приемными каналами А и В, настроенными на соответствующие частоты. После детектирования видеосигналы каналов А и В объединяются и далее обрабатываются совместно. В простейшем случае производятся совмещение видеосигналов по времени с помощью линий задержки и сложение по амплитуде.
Синхронизация в РЛС осуществляется таким образом, что один из каналов (А) является ведущим, а другой -ведомым.
Радиолокационные станции такого рода при произвольном числе частотных каналов называются частотно-многоканальными РЛС с общей для всех каналов антенной. Преимущества частотно-многоканальной РЛС перед одноканальной состоят в следующем:
· увеличивается суммарная мощность излучения РЛС при наличии ограничений мощности отдельного передатчика;
· увеличиваются дальность обнаружения целей и точность измерения координат;
· увеличиваются надежность работы РЛС и ее помехозащищенность по отношению к помехам искусственного и естественного происхождения.
Увеличение дальности обнаружения и точности измерения координат целей объясняется тем, что при достаточно большом разносе несущих частот излучаемых сигналов
fa-fb =Df ³ c/lц,
где с - скорость распространения радиоволн, lц - линейный размер цели.
Принимаемые сигналы и помехи в каналах А и В оказываются некоррелированными, и сумма выходных напряжений этих каналов, характеризуется гораздо меньшими флюктуациями амплитуды в процессе наблюдения сложной движущейся цели, чем в случае приема сигнала на одной частоте. Этим же эффектом сглаживания флюктуации объясняется и возможность более эффективного подавления мешающих отражений от земной поверхности и местных предметов. Например, для РЛС АТСR-22 и АТСR-44 дальность действия в двухчастотном режиме -работы на 20 -30% больше, чем в одночастотном. Надежность работы РЛС при использовании двух каналов с разносом частот выше, чем одноканальной РЛС, благодаря тому, что при отказе одного канала или выключении его для технического обслуживания данная РЛС способна выполнять своя функции при допустимом ухудшении некоторых показателей (уменьшений дальности действия и коэффициента готовности РЛС).
Другой важной особенностью рассматриваемой РЛС является использование дополнительного луча диаграммы направленности антенны в вертикальной плоскости для приема сигналов, отраженных от целей при больших значениях угла места. При этом зона обнаружения РЛС в вертикальной плоскости формируется с помощью двух лучей: основного (нижнего) луча при работе основного облучателя антенны в режимах передачи и приема, и дополнительного (верхнего) луча при работе дополнительного облучателя антенны только в режиме приема. Применение двухлучевой ДНА на прием отраженных от целей сигналов реализует один из методов борьбы с мешающими отражениями от земной поверхности и местных предметов. Подавление этих отражений осуществляется путем весового суммирования сигналов, принимаемых по основному и дополнительному лучам ДНА. Направление максимального излучения по верхнему лучу размещается в вертикальной плоскости обычно на 3 -5° выше, чем по нижнему. При этом методе борьбы с помехами достигается ослабление сигналов от местных предметов на 15 -20 дБ.
В некоторых типах РЛС зона обнаружения в вертикальной плоскости формируется с учетом применения локальной обработки принимаемых сигналов в системе СДЦ. Такой принцип формирования зоны обнаружения на примере трассовой РЛС показан на рис. 1.2. Вся зона обнаружения дальности разбивается на четыре участка 1 -1V. Границы участков задаются по жесткой программе в зависимости от конкретных, условий размещения РЛС. На рис. 1.2 обозначены:
К1 -верхняя граница использования сигналов дополнительного луча 2, обработанных в системе СДЦ (Доп. СДЦ);
Рис. 1.2. К-принципу формирования зоны - трассовой РЛС: 1 - основной луч; 2 - дополнительный луч
К2 - верхняя граница использования сигналов основного луча 1, обработанных в системе СДЦ (Осн. СДЦ);
А - верхняя граница использования сигналов дополнительного луча 2, не обработанных в системе СДЦ (Доп. А);
Дмах - максимальная дальность действия РЛС, являющаяся верхней границей использования необработанных в системе СДЦ сигналов основного луча 1.
(Осн. А), положение границ К1, К2 и А регулируется по дальности в пределах, указанных на рисунке. Для участка III предусмотрено использование двух подпрограмм, определяемых порядком следования заданных границ (импульсов переключения); К1 - А - К2 или К1 - К2 -А. Данный принцип формирования зоны обнаружения позволяет:
· получить максимальное обнаружение в вертикальной плоскости для подавления помех от местных предметов на начальном участке дальности 1;
· свести к минимуму область воздушного пространства, где используется сумма сигналов Осн. СДЦ +Доп. СДЦ, и тем самым уменьшить влияние скоростной характеристики системы СДЦ (участок II);
· при наличии помех типа «ангелов», которые не устраняются полностью системой СДЦ, целесообразно использовать сигнал дополнительного луча (участок 111 при К2<А).
Совместное использование в РЛС двухлучевой ДНА на прием и локальной обработки сигналов в системе СДЦ обеспечивает общее подавление помех от местных предметов на 45 -56 дБ при наличии двукратного череспериодного вычитания в системе СДЦ и на 50 -55 дБ - при трехкратном вычитании.
Необходимо отметить, что рассмотренный принцип формирования зоны обнаружения может применяться как в одночастотном, так и в двухчастотном режиме работы РЛС с разносом частот.
Отличие двухчастотного режима состоит в том, что при формировании зоны обнаружения используются суммы необработанных в системе СДЦ сигналов ОснА А + Оснв - А и Допа -А+Допб-А, а в системе СДЦ обрабатываются только сигналы одного частотного канала (ведущего А, рис. 1.1).
Нетрудно заметить, что в основу описанного способа формирования зоны обнаружения «положена идея управлений структурой и параметрами РЛС в зависимости от помеховой обстановки в конкретных условиях эксплуатации. При этом управление осуществляется по жесткой программе. После предварительного анализа помеховой обстановки и задания границ К1, К2. и А между четырьмя участками дальности зоны обнаружения структура РЛС приобретает фиксированную конфигурацию и не меняется в процессе работы РЛС.
В других современных РЛС применяется более гибкий способ формирования зоны обнаружения, реализующий идею динамической адаптации РЛС к помеховой обстановке. Такой способ используется, например, в РЛС АТСR-22 и АТСR-44. При этом вся зона обнаружения по дальности разбивается на два равных участка (1 и 11). Участок 1, Для которого характерно наибольшее влияние помех от местных предметов, разбивается на более мелкие элементы по дальности (16 элементов)..Зона обзора по азимуту равная 360°, тоже разбивается на элементарные секторы по 5,6° (64 сектора). В результате вся зона обзора в горизонтальной плоскости в пределах первой половины максимальной дальности действия РЛС получается разбитой на 16*64=1024 ячейки. В течение рабочего цикла, равного трем периодам обзора, осуществляется анализ помеховой обстановки и в специальном запоминающем устройстве РЛС формируется текущая карта помех содержащая информацию об уровне помех в каждой из 1024 ячеек. На основе этой, информации производится выбор весовых коэффициентов для формирования взвешенной суммы сигналов принятых по основному и дополнительному лучам ДНА, для каждой из этих ячеек в отдельности. В результате зона обнаружения РЛС в вертикальной плоскости приобретает сложную конфигурацию: нижняя кромка зоны обнаружения в разных ячейках имеет различный наклон (-0,5; 0,1; 0,5 или 1°). На второй половине дальности, (участок II) используется только сигнал, принимаемый по основному лучу.
Сравнивая два рассмотренных способа формирования зоны обнаружения РЛС, необходимо отметить, что объединение сигналов основного и дополнительного лучей ДНА при первом способе производится на видеочастоте, а при втором способе - на высокой частоте. В последнем случае операция суммирования сигналов осуществляется в специальном устройстве - формирователе нижней кромки зоны обнаружения (ФНК, рис. 1.1). При этом для дальнейшей обработки суммарного сигнала используется один приемный канал, включая систему СДЦ. При первом способе необходимы два приемных канала, что приводит к усложнению аппаратуры. Кроме того, при втором способе более полно используются возможности системы СДЦ, так как обработке в этой системе подвергаются сигналы обоих частотных каналов РЛС, а не только сигнала ведущего канала, как при первом способе. Наряду с перечисленными достоинствами второй способ формирования зоны обнаружения обладает существенным недостатком, затрудняющим его широкое использование:
для суммирования сигналов на высокой частоте требуются высокая точность и стабильность формирования этих сигналов. Нарушение этого требования в процессе эксплуатации РЛС может привести к снижению степени подавления помех от местных предметов за счет применения двухлучевой диаграммы направленности антенны.
Рассмотрим принцип действия РЛС, структурная схема которой представлена на рис. 1.1. Данная РЛС работает в режиме кругового обзора по азимуту, обеспечивая обнаружение воздушных целей и измерение наклонной дальности и азимута этих целей. Круговой обзор осуществляется за счет механического вращения антенны РЛС, состоящей из параболического отражателя и, двух рупорных облучателей - основного и дополнительного. В качестве зондирующего сигнала используется периодическая последовательность радиоимпульсов с прямоугольными огибающими. При этом измерение азимута цели осуществляется амплитудным методом, основанным на использовании направленных свойств антенны РЛС в горизонтальной плоскости, а измерение дальности - временным методом путем измерения запаздывания отраженного от цели сигнала относительно момента излучения зондирующего сигнала.
Рассмотрим более подробно работу одного канала РЛС. Система синхронизации (СС) вырабатывает импульсы запуска РЛС, которые поступают на вход модулятора М передающего устройства. Модулятор М под воздействием импульсов запуска вырабатывает мощные модулирующие импульсы, поступающие на оконечный усилитель (ОУ) передатчика РЛС, выполненного по схеме «задающий генератор - усилитель мощности». Генератор радиочастоты (ГРЧ), стабилизированный кварцевым резонатором, генерирует непрерывные гармонические колебания с частотой fа, которые усиливаются в оконечном усилителе и модулируются по амплитуде импульсами модулятора (М). В результате на выходе ОУ формируется последовательность мощных когерентных радиоимпульсов с несущей частотой fа и прямоугольной: огибающей. Эти радиоимпульсы через антенный переключатель (АП) и блок сложения мощностей и разделения сигналов БСРС поступают в антенное устройство РЛС и излучаются антенной в направлении к цели.
Отраженные от цели радиоимпульсы с несущей частотой fа, принимаемые по основному лучу ДНА, через блоки БСРС, АП и малошумящий УРЧ поступают на один из входов формирователя нижней кромки (ФНК). Радиоимпульсы с той же частотой fд, принимаемые по дополнительному лучу ДНА, через блок разделения сигналов БРС и УРЧ поступают на второй вход ФНК. На выходе ФНК в результате весового суммирования сигналов основного и дополнительного лучей образуется суммарный сигнал, который поступает на вход приемника РЛС. Управляющий сигнал, определяющий выбор весовых коэффициентов при суммировании, поступает на управляющий вход ФНК от системы цифровой обработки сигналов и адаптации РЛС. В приемном устройстве осуществляются преобразование частоты, усиление и частотная селекция сигнала в усилителе промежуточной частоты и детектирование с помощью амплитудного и фазового детекторов. Видеосигнал А с выхода амплитудного детектора поступает далее в систему цифровой обработки, минуя систему СДЦ, а видеосигнал СДЦ с выхода фазового детектора поступает на вход системы СДЦ, входящей в состав системы цифровой обработки сигналов. Сигналы с опорными частотами fа1 и fа2 необходимые для работы преобразователя частоты и фазового детектора приемника, формируются общим задающим ГРЧ. Благодаря этому в данной РЛС реализуется истинно когерентный метол СДЦ.
Кроме описанных выше основных процессов, протекающих в аналоговой части РЛС, имеет место ряд вспомогательных процессов, которые обеспечивают нормальное функционирование РЛС. К ним относятся, например, различного рода автоматические регулировки усиления приемника:
· временная автоматическая регулировка усиления,
· шумовая автоматическая регулировка усиления,
· автоматическая ступенчатая регулировка усиления УПЧ с помощью схемы адаптивного аттенюатора помех.
Названные регулировки, исключая ШАРУ, обеспечивают сжатие динамического диапазона принимаемого радиолокационного сигнала и его согласование с динамическим диапазоном системы цифровой обработки сигналов и адаптации. С помощью ШАРУ обеспечивается стабилизация уровня шумов на выходе приемника РЛС.
В антенно-фидерной системе РЛС предусмотрены:
· устройства для плавной регулировки поляризации излучаемых колебаний,
· измерители проходящей мощности, частоты и формы зондирующего сигнала.
В псевдокогерентных РЛС, использующих передающие устройства, выполненные на магнетроне, в состав приемника входит также система автоматической подстройки частоты магнетрона. Эта система служит для подстройки частоты магнетрона и для фазирования когерентного гетеродина, генерирующего опорные колебания для системы СДЦ.
В рассматриваемой истинно когерентной РЛС для обеспечения постоянной разности частот fа и fб двух частотных каналов используется специальный генератор сдвига частоты, с помощью которого под воздействием колебаний ГРЧ канала А (см. рис. 1.1) в канале В осуществляется формирование колебаний с частотами fб и fб1, сдвинутыми относительно частот fа и fа1.
Цифровая часть РЛС начинается со входа системы цифровой обработки сигналов и адаптации РЛС. Главными функциями этой системы являются:
· очистка принимаемого сигнала от различного рода помех,
· выделение полезной информации для обеспечения заданных тактико-технических характеристик РЛС,
· анализ текущей помеховой обстановки,
· автоматическое управление режимами работы и параметрами РЛС (функция адаптации).
Входные видеосигналы А, СДЦ и Метео, поступающие с выхода приемника, преобразуются с помощью аналого-цифровых преобразователей в цифровую форму. При этом осуществляется дискретизация по времени и многоуровневое квантование по- амплитуде этих сигналов.
Первая функция системы обработки реализуется с помощью следующих цифровых устройств:
· устройства череспериодного (двойного или тройного) вычитания системы СДЦ;
· видеокоррелятора для подавления несинхронных помех и отраженных сигналов предыдущею периода зондирования;
· устройства ЛОГ-МПВ-АнтиЛОГ для выделения полезного сигнала на фоне помех от протяженных по дальности и азимуту целей (в частности, помех от метеообразований);
· устройства выделения сигналов для получения информации о контурах метеообразований.
При выполнении второй функции системы обработки используются следующие устройства:
· устройство секторизации для разделения зоны обзора на ячейки и распределения памяти системы;
· картограф помех для формирования динамической карты помех;
· анализаторы параметров принимаемых сигналов, с помощью которых проводится анализ текущей помеховой обстановки (анализаторы уровня сигнала в тракте промежуточной частоты, частоты ложных тревог, параметров сигналов от метеообразований и др.);
· оперативные запоминающие устройства для хранения информации о текущей помеховой обстановке;
· управляющие устройства для формирования сигналов управления режимами работы и параметрами РЛС, которые определяют:
· выбор весовых коэффициентов для ФНК,
· выбор режима А или СДЦ,
· включение или отключение устройства ЛОГ-МПВ-АнтиЛОГ,
· подстройку порога обнаружения при стабилизации уровня ложных тревог,
· другие параметры обработки сигналов для каждого участка или ячейки зоны обзора отдельно.
Устройство S (см. рис. 1.1) осуществляет объединение сигналов двух частотных каналов РЛС. С выхода этого устройства в АПОИ передаются два объединенных сигнала: сигнал А (или СДЦ) и сигнал Метео. В РЛС, не содержащих собственной АПОИ, эти сигналы преобразуются с помощью цифро-аналоговых преобразователей в аналоговую форму и передаются на входы АПОИ, сопрягаемой с РЛС, контрольного индикатора (КИ) и широкополосной линии связи ШЛС. Последняя обеспечивает передачу радиолокационной информации в необработанном виде, т. е. минуя АПОИ, на аппаратуру отображения неавтоматизированной системы УВД.
Аппаратура первичной обработки информации обычно представляет собой универсальную аппаратуру, сопрягаемую с различными типами РЛС. В этой аппаратуре осуществляются операции обнаружения сигналов от воздушных целей и измерения их координат, а также объединение информации первичной РЛС с информацией вторичного радиолокатора. С выхода АПОИ радиолокационная информация в цифровом виде транслируется в центр УВД с помощью узкополосной аппаратуры передачи данных АПД. Кроме того, эта же информация поступает на контрольный индикатор КИ первичной РЛС. Для синхронизации АПОИ, КИ и аппаратуры отображения, подключаемой через ШЛС, используются сигналы, вырабатываемые системой синхронизации СС, а также сигнал текущего азимутального направления ДНА первичной РЛС, поступающий из антенно-фидерной системы. В универсальных АПОИ обычно предусматривается автономный синхронизатор, позволяющий вести обработку и выдачу сигналов в оптимальном темпе независимо от временных режимов работы первичного и вторичного радиолокаторов. Для этого на входе АПОИ предусматриваются буферные запоминающие устройства, управляемые тактовыми импульсами и сигналами угловой информации названных радиолокаторов. Дальнейшая обработка в АПОИ производится с помощью управляющих сигналов, вырабатываемых автономным синхронизатором АПОИ.
Важной особенностью рассматриваемой перспективной РЛС является использование системы автоматического встроенного контроля (АВК), обеспечивающей допусковый контроль аналоговых и тестовый контроль цифровых устройств и систем РЛС.
Конструктивно РЛС выполняется из отдельных сборочных единиц - модулей, при комплектации которых в определенных комбинациях можно получить несколько вариантов РЛС, различающихся по дальности действия, надежности и стоимости. Этим достигается рациональное использование оборудования РЛС с учетом конкретных условий применения.
Передающий тракт любой РЛС состоит из передающего устройства, фидерной системы и антенны. Радиопередающее устройство предназначено для формирования зондирующих сигналов путем преобразования энергии источников питания в энергию высокочастотных (ВЧ) колебаний и управления параметрами этих колебаний. Для этого в состав передающего устройства обычно включают источник питания, модулятор (управляющее устройство) и генератор.
Источник питания обеспечивает подачу энергии в виде переменного или постоянного тока. Во втором случае источник питания выполняется в виде высоковольтного выпрямителя. Оба типа источников нашли применение в бортовых РЛС.
Модулятор осуществляет управление параметрами огибающей ВЧ сигнала.
Генератор вырабатывает мощный ВЧ сигнал, параметры которого определяются управляющими сигналами модулятора.
Первая группа — с непрерывным излучением (без модуляции и с модуляцией излучаемых колебаний по амплитуде, частоте и фазе). Подобные передающие устройства используются в бортовых радиолокационных системах, предназначенных для определения путевой скорости и угла сноса самолета (по доплеровскому изменению частоты), трансляции радиолокационной информации и т.д.
Вторая группа — передатчики, работающие в импульсном режиме излучения с длительностью ВЧ-импульсов от долей микросекунды до сотен миллисекунд и скважностью от единиц до сотен тысяч. В таких передающих устройствах может применяться амплитудная, частотная и фазовая модуляции ВЧ-колебаний как внутри отдельного импульса, так и в последовательности импульсов. Кроме того, могут использоваться и специфические виды модуляции (по длительности импульса, кодово-импульсная и т.п.).

Структурная схема передатчика с однокаскадным генератором
|
|
Дата добавления: 2014-01-07; Просмотров: 4867; Нарушение авторских прав?; Мы поможем в написании вашей работы!