КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Линеаризация дифференциальных уравнений
 |
Общие понятия
ЭЛЕМЕНТОВ И СИСТЕМ УПРАВЛЕНИЯ
МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ
вопросы
Для анализа и синтеза системы управления требуется ее математическое описание, которое бы связывало поведение координат системы - ее переменных величин в процессе работы, то есть во времени. Поведение координат системы во времени называется динамикойсистемы. Так как система состоит из взаимосвязанных функциональных элементов, то для получения ее математического описания необходимо получить математические описания отдельных элементов. Математическое описание элемента устанавливает связь во времени между его текущими значениями выходных y(t) и входных x(t) величин.
Динамикаэлемента, то есть поведение его координат во времени, описывается дифференциальными уравнениями. В динамике связь между координатами, то есть между входными и выходными величинами, меняется во времени. Динамика характеризуется переходным процессом.
При времени, стремящемся к бесконечности t®¥, текущие координаты y(t) и x(t) принимают постоянные установившиеся значения и наступает статика элемента, которая описывается алгебраическими уравнениями. В статике входные и выходные величины элемента постоянные: x(¥)=x0=const; y(¥)=y0=const. Эти постоянные величины называются установившимися. А процесс, соответствующий статике, называется установившимся процессом.
Теоретически статика наступает при t®¥, однако на практике принято считать, что статика наступает тогда, когда текущие координаты отличаются от своих установившихся значений не более чем на 5%.
Динамическое уравнение отдельного элемента составляется по правилам соответствующей технической науки (элемент может представлять собой электрическую машину, механическую передачу, нагревательный прибор, электрическую цепь, электронную схему и т.п.).
|
|
|
Подавляющее большинство реальных элементов имеют нелинейные характеристики и, следовательно, описываются нелинейными дифференциальными уравнениями. Однако, многие нелинейные элементы можно линеаризовать, то есть заменить нелинейные уравнения элемента приближенными линейными. Это позволяет для анализа и синтеза систем управления использовать методы теории линейных систем, которые наиболее просты и хорошо разработаны. В основе линеаризации нелинейных уравнений лежит предположение, что в исследуемом динамическом процессе переменные координаты системы изменяются таким образом, что их отклонения от установившихся значений остаются все время достаточно малыми величинами. Это условие выполняется для замкнутых систем, так как последние работают по принципу ликвидации ошибки.
Геометрическая трактовка линеаризации. Изобразим графически нелинейную зависимость (рис. 2.1)
y(t) = F(x(t)). (2.1)
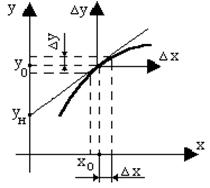
Рис. 2.1. Геометрическая интерпретация линеаризации
Текущие значения координат y и x запишем как
y(t) = y0 + Dy(t);
x(t) = x0 + Dx(t);
где y0, x0 – установившиеся значения, Dy, Dx – их отклонения от установившихся значений.
В рабочей точке (x0, y0), определяемой установившимися значениями, заменим участок кривой касательной и получим прямую, описываемую линейным уравнением
y = yн + kx,
где yн - постоянная величина;
 - коэффициент, определяемый наклоном касательной к кривой в рабочей точке (x0, y0).
- коэффициент, определяемый наклоном касательной к кривой в рабочей точке (x0, y0).
Для исключения из уравнения величины yн перенесем начало координат в рабочую точку. Тогда получим линейное уравнение, связывающее между собой отклонения переменных величин от своих установившихся значений, вида
Dy(t) = k Dx(t). (2.2)
Таким образом, линеаризация уравнения геометрически может трактоваться как замена первоначальной кривой на касательную к ней прямую в точке установившегося режима. Очевидно, что эта замена тем точнее, чем меньше величины отклонений координат элемента от своих установившихся значений в исследуемом динамическом процессе.
|
|
|
В общем случае при составлении уравнения динамики элемента системы (рис. 2.2), имеющего входную величину x, выходную - y и внешнее воздействие f, получается динамическое уравнение произвольного нелинейного вида
 (2.3)
(2.3)

Рис. 2.2. Элемент автоматической системы
Допустим, что установившиеся значения переменных y, x и f являются постоянными величинами y0, x0, f0, характеризующими установившийся режим и определяющими рабочую точку элемента.
Тогда для текущих координат можно записать
y(t) = y0 + Dy(t);
x(t) = x0 + Dx(t);
f(t) = f0 + Df(t);
где Dy, Dx, Df – отклонения y, x, f от своих установившихся значений.
Из (2.3) получается уравнение статики
F(y0) = G(x0, f0). (2.4)
Для линеаризации уравнения (2.3) последнее раскладывают в ряд Тейлора по степеням отклонений всех координат элемента от своих установившихся значений. Тогда уравнение (2.3) примет вид
 + (члены высшего порядка малости). (2.5)
+ (члены высшего порядка малости). (2.5)
Вычитая из последнего уравнения (2.5) уравнение статики (2.4) и отбросив все последующие члены разложения как малые высшего порядка, придем к линейному уравнению динамики элемента
 (2.6)
(2.6)
Здесь нижний индекс “0” обозначает, что значения частных производных должны быть определены в точке установившегося режима элемента.
Это дифференциальное уравнение, так же как и (2.3), описывает тот же динамический процесс в том же элементе автоматической системы. Сравним (2.3) и (2.6):
уравнение (2.3) - точное, а уравнение (2.6) - приближенное, ибо в процессе его получения были отброшены малые высшего порядка;
уравнение (2.3) записано относительно переменных величин элемента, а уравнение (2.6) - относительно отклонений переменных от своих установившихся значений;
уравнение (2.3) - нелинейное, уравнение (2.6) - линейное относительно отклонений, коэффициенты которого определяются рабочей точкой элемента, то есть его установившимися значениями; при смене рабочей точки эти коэффициенты изменяются.
Таким образом, цель получения линейного дифференциального уравнения взамен прежнего нелинейного достигнута. Уравнение (2.6) называется дифференциальным уравнением элемента в отклонениях.
|
|
|
Ограничение метода. Данным методом могут быть линеаризованы уравнения элементов, статические характеристики которых в окрестности точки установившегося режима гладкие, то есть их производные непрерывны и однозначны. Не могут быть линеаризованы уравнения элементов с негладкими, неоднозначными и имеющими разрывы в окрестности точки установившегося режима статическими характеристиками.
Замечание: в дальнейшем будем использовать только линеаризованные уравнения, записанные относительно отклонений от установившихся значений переменных, однако для сокращения записи знак “D” будем опускать.
Пример. Электромагнитный момент M электродвигателя постоянного тока с независимым возбуждением определяется нелинейным уравнением
M = c Iя Iв,
где c - постоянный коэффициент;
Iя, Iв - токи, протекающие в цепях якоря и возбуждения.
Решение. Линеаризуем выражение для M разложением в ряд Тэйлора и учетом лишь линейных составляющих ряда. В результате получим соотношение для малых приращений
(¶M/¶M)0 DM = (¶(c Iя Iв)/¶Iя)0 DIя + (¶(c Iя Iв)/¶Iв)0 DIв.
Откуда следует
DM = c Iв0 DIя + c Iя0 DIв.
Здесь нижним индексом “0” обозначены установившиеся значения переменных, относительно которых изменяются их приращения.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 509; Нарушение авторских прав?; Мы поможем в написании вашей работы!