КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Рівняння Вінера-Хопфа
|
|
|
|
Це рівняння встановлює зв’язок між кореляційними функціями вхідного X(t) і вихідного Y(t) сигналів, що діють у лінійній динамічній системі.
Відповідно до (2.28) взаємна кореляційна функція цих сигналів має вигляд:
 (2.58)
(2.58)
Тоді з урахуванням (2.51) запишемо:
 (2.59)
(2.59)
Цей вираз має назву рівняння Вінера-Хопфа.
Застосувавши до інтегрального рівняння (2.59) пряме перетворення Фур’є, можна записати:
Syx(w) = W(jw)Sx(w) або W(jw) = Syx(w) / Sx(w), (2.60)
де Syx(w) і Sx(w) – взаємна і власна спектральні щільності.
Застосовуючи до (2.60) обернене перетворення Фур’є, маємо:
 . (2.61)
. (2.61)
Рівняння (2.60) і (2.61) дозволяють знайти динамічні характеристики системи W(jw) і w(t) за відомими імовірнісними характеристиками входу X(t) і виходу Y(t), що визначаються за реалізаціями випадкового процесу.
3. Дискретні та цифрові системи
Система управління називається дискретною, якщо вона містить хоча б один дискретний елемент. Елемент називається дискретним, якщо його вихідний сигнал квантується по часу або по рівню. Кажуть, що сигнал квантований по часу, якщо він являє собою послідовність імпульсів, і квантованим по рівню, якщо він приймає дискретні значення, тобто значення, кратні певній мінімальній величині, яку називають рівнем квантування, або квантом.
Розрізняють три види квантування сигналів: за рівнем, за часом, за рівнем і за часом одночасно.
Квантування за рівнем полягає у фіксації визначених дискретних значень безперервного сигналу. При цьому безперервний сигнал замінюється сигналом, який змінюється східчасто. Суміжні дискретні значення відрізняються одне від одного на постійну величину  , яка називається кроком квантування. Перехід з одного рівня на інший відбувається у моменти часу, коли безперервний сигнал досягає чергового фіксованого значення (рис. 3.1, а), або коли сигнал проходить середину інтервалу між двома суміжними значеннями (рис. 3.1, б).
, яка називається кроком квантування. Перехід з одного рівня на інший відбувається у моменти часу, коли безперервний сигнал досягає чергового фіксованого значення (рис. 3.1, а), або коли сигнал проходить середину інтервалу між двома суміжними значеннями (рис. 3.1, б).
|
|
|
Квантування за часом полягає у фіксації значень безперервного сигналу в рівновіддалені один від одного дискретні моменти часу. При цьому квантований сигнал може мати східчасту форму (рис. 3.1, в) або являти собою послідовність імпульсів (рис. 3.1, г). Суміжні моменти відрізняються один від одного на постійну величину Dt = T, яка називається інтервалом дискретності або періодом повтору.
Під час сумісного квантування за рівнем і за часом фіксуються дискретні за рівнем значення, найближчі до значень безперервного сигналу в дискретні моменти часу (рис. 3.1, д, е).
Залежно від виду квантування, що застосовується, всі дискретні системи можна розділити на три класи:
- релейні; у них квантування відбувається за рівнем;
- імпульсні, в яких квантування відбувається за часом;
- цифрові (релейно-імпульсні) з квантуванням і за рівнем, і за часом.
Рис. 3.1 - Види квантування сигналів: за рівнем (а; б), за часом (в; г), за рівнем і за часом (д; е)
Квантування за рівнем у релейних системах відбувається за допомогою спеціальних елементів – квантувачів. Найпростішим квантувачем є дво- та трипозиційні реле. Вони квантують безперервний сигнал відповідно за двома і трьома рівнями.
Квантування за часом відбувається за допомогою імпульсного елемента.
Одночасне квантування сигналів за рівнем і за часом у цифрових системах виконується за допомогою аналого-цифрових перетворювачів (АЦП).
На другому етапі перетворення квантований сигнал відповідно до одного із законів модуляції перетворюється на імпульсну послідовність.
Розрізняють такі типи імпульсної модуляції (рис.3.2):
Амплітудно - імпульсну модуляцію (AІМ), при якій змінюється амплітуда  вихідних імпульсів у залежності від значень вхідної величини в моменти квантування
вихідних імпульсів у залежності від значень вхідної величини в моменти квантування  , де
, де - коефіцієнт передачі імпульсного елемента.
- коефіцієнт передачі імпульсного елемента.
|
|
|
Широтно-імпульсну модуляцію (ШІМ), при якій змінюється ширина імпульсів  в залежності від значень вхідної величини в моменти квантування. Величину
в залежності від значень вхідної величини в моменти квантування. Величину  - називають відносною тривалістю імпульсів. Вона показує яку частину періоду слідування імпульсів складає його тривалість.
- називають відносною тривалістю імпульсів. Вона показує яку частину періоду слідування імпульсів складає його тривалість.
Фазово–імпульсну модуляцію (ФІМ), при якій відбувається часовий зсув імпульсів  у залежності від значень вхідної величини в моменти квантування.
у залежності від значень вхідної величини в моменти квантування.
З усіх видів імпульсної модуляції найпростішою є АІМ. У випадку АІМ імпульсний елемент є лінійною динамічною ланкою. При амплітудно-імпульсній модуляції імпульсний елемент виробляє прямокутні імпульси однакової тривалості з амплітудою, пропорційною величині вхідного сигналу в моменти квантування.
Широке застосування систем керування з різними видами модуляції сигналу пояснюється низкою їх переваг:
- можливість багатоканального керування, тобто дискретний керуючий пристрій можна використовувати для одночасного керування декількома однотипними об’єктами;
- можливість стикування з цифровими обчислювальними пристроями, що дозволяє реалізувати більш складні закони керування;
- можливість тривалого збереження і запам’ятовування інформації;
- висока завадостійкість, надійність; підвищена точність передавання і перетворення сигналів;
- менші габарити та вага; зручність для агрегатного-блочної побудови систем.
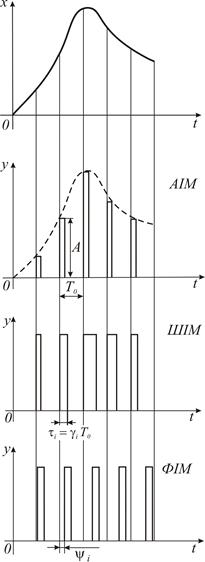
Рис.3.2. Види імпульсної модуляції.
САК з імпульсною модуляцією сигналу відрізняється від безперервної системи наявністю імпульсного модулятора, який перетворює безперервний вхідний сигнал на послідовність імпульсів. Залежно від того, який з параметрів імпульсної послідовності модулюється, тобто змінюється під дією модулюючого сигналу, розрізняють:
- амплітудно-імпульсний модулятор, якщо модулюється амплітуда вихідних імпульсів; при цьому тривалість імпульсів t= const і період слідування  ;
;
- широтно-імпульсний модулятор, якщо модулюється ширина (тривалість) t вихідних імпульсів; при цьому амплітуда  ; ;
; ;
- частотно-імпульсний модулятор, якщо модулюється частота повтору імпульсів у вихідній імпульсній послідовності; амплітуда і тривалість імпульсів постійні, тобто ; t = const.
|
|
|
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 683; Нарушение авторских прав?; Мы поможем в написании вашей работы!