КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Типовые законы регулирования
|
|
|
|
Регулятор ( или УУ) — в теории управления устройство, которое следит за работой объекта управления как системы и вырабатывает для неё управляющие сигналы. Регуляторы следят за изменением некоторых параметров объекта управления (непосредственно, либо с помощью наблюдателей) и реагируют на их изменение с помощью некоторых алгоритмов управления в соответствии с заданным качеством управления.
Регуляторы в подавляющем большинстве работают по принципу отрицательной обратной связи с целью компенсировать внешние возмущения, действующие на объект управления и отработать заданный извне или заложенный в системе закон управления. Реже используется прямая связь.
Самый простой, универсальный и, поэтому, популярный в промышленности - ПИД регулятор. Пример сложного и эффективного регулятора - регулятор на основе Фильтра Калмана.
Типы. Регуляторы разделяют по нескольким признакам:
- По виду закона управления (для линейных регуляторов):
простейшие пропорциональные П-регуляторы, интегральные И-регуляторы, дифференциальные Д-регуляторы;
промышленные пропорционально-интегральные ПИ-регуляторы, пропорционально-дифференциальные ПД-регуляторы, пропорционально-интегрально-дифференциальные ПИД-регуляторы.
- По линейности закона управления: линейные и нелинейные регуляторы.
- По общему принципу функционирования: адаптивные, модальные, робастные регуляторы и т. д.
Законом регулирования называется уравнение, описывающее зависимость между входом регулятора и его выходом. Передаточная функция ПИД-регулятора:
 .
.
ПИД-регулятор — устройство в управляющем контуре с обратной связью. Используется в САУ для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. ПИД-регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе — интеграл сигнала рассогласования, третье — производная сигнала рассогласования.
|
|
|
Пропорциональная составляющая вырабатывает выходной сигнал, противодействующий отклонению регулируемой величины от заданного значения, наблюдаемому в данный момент времени. Он тем больше, чем больше это отклонение. Если входной сигнал равен заданному значению, то выходной равен нулю.
Однако при использовании только пропорционального регулятора значение регулируемой величины никогда не стабилизируется на заданном значении. Существует так называемая статическая ошибка, которая равна такому отклонению регулируемой величины, которое обеспечивает выходной сигнал, стабилизирующий выходную величину именно на этом значении. Например, в регуляторе температуры выходной сигнал (мощность нагревателя) постепенно уменьшается при приближении температуры к заданной, и система стабилизируется при мощности равной тепловым потерям. Температура не может достичь заданного значения, так как в этом случае мощность нагревателя станет равна нулю, и он начнёт остывать.
Чем больше коэффициент пропорциональности между входным и выходным сигналом (коэффициент усиления), тем меньше статическая ошибка, однако при слишком большом коэффициенте усиления, при наличии задержек в системе, могут начаться автоколебания, а при дальнейшем увеличении коэффициента система может потерять устойчивость.
Интегральная составляющая пропорциональна интегралу от отклонения регулируемой величины. Её используют для устранения статической ошибки. Она позволяет регулятору со временем учесть статическую ошибку.
|
|
|
Если система не испытывает внешних возмущений, то через некоторое время регулируемая величина стабилизируется на заданном значении, сигнал пропорциональной составляющей будет равен нулю, а выходной сигнал будет полностью обеспечивать интегральная составляющая. Тем не менее, интегральная составляющая также может приводить к автоколебаниям.
Дифференциальная составляющая пропорциональна темпу изменения отклонения регулируемой величины и предназначена для противодействия отклонениям от целевого значения, которые прогнозируются в будущем. Отклонения могут быть вызваны внешними возмущениями или запаздыванием воздействия регулятора на систему.
При исследовании работы САР с разными регуляторами используется интерактивный инструмент для моделирования, имитации и анализа динамических систем Simulink. Он даёт возможность строить графические блок-диаграммы, имитировать динамические системы, исследовать работоспособность систем и усовершенствовать проекты. Simulink полностью интегрирован с Matlab и обеспечивает немедленный доступ к широкому спектру инструментов анализа и проектирования.
Ввод характеристик исследуемых систем проводится в диалоговом режиме, путём графической сборки схем соединений элементарных стандартных звеньев (модулей или блоков). Создание моделей в пакете Simulink основано на использовании технологии Drag-and-Drop («перетяни и оставь»). В качестве «кирпичиков» для построения S-моделей используются модули (или блоки), которые сохраняются в библиотеке Simulink.
Схема имитационной модели САР с ПИД-регулятором собранной в пакете Simulink выглядит так:
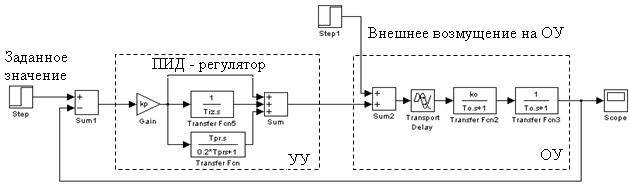
Рис. 3.13
В зависимости от закона регулирования в САР возникают различные переходные процессы, отличающиеся по показателям качества (рис. 3.14)
Критерии оценки качества регулирования: скорость регулирования (время уменьшения ошибки регулирования до заданной величины); точность, как установившаяся ошибка и как величина перерегулирования; запас устойчивости и отсутствие колебаний, в т.ч. затухающих.
Наиболее распространенными прямыми показателями или критериями качества, применяемыми в системах управления, являются:
1 Статическая ошибка регулирования, определяемая как разность между установившимся значением регулируемой переменной и ее заданным значением.
|
|
|
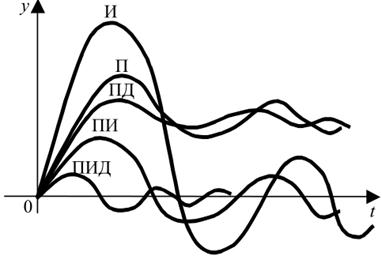
Рис. 3.14 Переходные процессы в АСР с различными законами регулирования
2 Динамическая ошибка регулирования, определяемая как наибольшее отклонение в переходном процессе регулируемой переменной от ее установившегося значения.
3 Время регулирования – время, за которое разность между текущим значением регулируемой переменной и ее заданным значением (или установившимся) становится меньше ε.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 1742; Нарушение авторских прав?; Мы поможем в написании вашей работы!