КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Нейросетевое прямое и косвенное адаптивное управление на основе желаемой (эталонной) модели
|
|
|
|
Важным приложением нейронных сетей является создание системы управления с обратной связью. Структура этой системы усложняется наряду с нелинейностью объекта другими факторами, как, например, наличие неизмеряемых и случайных возмущений, его структурных и параметрических неопределенностей, ненаблюдаемостью состояний. Удобной для применения стратегией управления таким объектом является адаптивное управление на основе эталонной модели (модели желаемой системы). На рис. 12 показана структура такой системы. Для учета того, что динамика объекта неизвестна, в ней (системе) используется механизм адаптации. Управляющее устройство (нейронная сеть) и объект формируют систему с собственной обратной связью. Объект получает от управляющего устройства входной сигнал u[i]. Также на него влияет возмущающее воздействие f[i]. Выход объекта, который обозначается как y[i+1], зависит также от собственного состояния x[i] объекта. Управляющее воздействие
u[i]=g1(v[i], y[i], xu [i], W)
зависит от собственного состояния управляющего устройства xu[i] и от матрицы весовых коэффициентов и смещений нейронной сети W, доступных для коррекции. Вектор–функция g1(.) определяет динамику управляющего устройства.
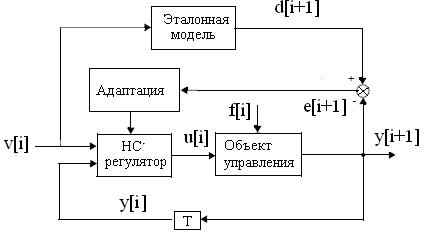
Рис. 12
Желаемая реакция d[i+1] формируется на выходе устойчивой эталонной модели (желаемой системы), которая образуется в ответ на желаемое задающее воздействие (эталонный сигнал). Желаемая реакция d[i+1] таким образом, является функцией эталонного сигнала v[i] и собственного состояния xd [i] эталонной модели:
d[i+1]=g2(v[i], xd [i]).
Вектор-функция g2(.) определяет динамику эталонной модели. Пусть ошибка на выходе, т.е. разность между выходами эталонной модели и объекта, обозначается как
|
|
|
e[i+1]=d[i+1]-y[i+1].
Наша цель состоит в том, чтобы так корректировать параметры W, чтобы норма ошибки выхода e[i] была бы минимизируема для момента времени i.
Метод управления, используемой в MRAC-системе (рис. 11), назван адаптивным прямым управлением в том смысле, что для идентификации объекта не предпринимается никаких действий, но при этом напрямую корректируются параметры управляющего устройства для повышения качества системы. К сожалению, пока не существует точных методов настройки параметров управляющего устройства, основанных на ошибке выхода, поскольку между управляющим устройством и ошибкой на выходе находится неизвестный объект. Чтобы обойти эту сложность, можно прибегнуть к адаптивному непрямому (косвенному) управлению (рис. 13). В этом последнем методе для обучения управляющего устройства используется двухшаговая процедура:
1. Для оценки выхода объекта путем идентификации определяется модель объекта. Для обучения нейронной сети используется ранее описанная технология.
2. Для получения градиента выхода объекта по настраиваемым параметрам управляющего устройства вместо самого объекта используется полученная на предыдущем шаге модель объекта.
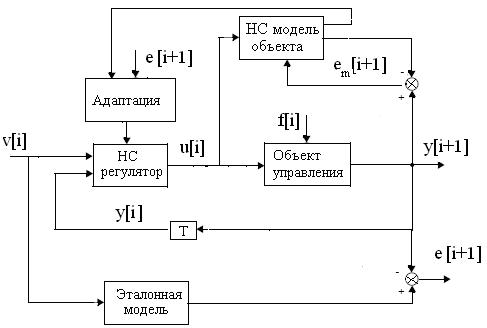
Рис. 13
Нейросетевые модели применяются также в других структурах, основанных на использовании моделей объекта, например, в системах управления с внутренней моделью и в системах с управлением с предсказанием, где в качестве моделей объекта используются нейросетевые модели.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 553; Нарушение авторских прав?; Мы поможем в написании вашей работы!