КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Дифференциальные системы спутниковой навигации
 |
Дифференциальное измерение позволяет измерять расстояния между двумя точками с большой точностью (сантиметры). Для этого измеряется положение навигатора в двух точках с небольшим промежутком времени. При этом, хотя каждое такое измерение имеет точность порядка 10-15 метров, измеренное расстояние имеет погрешность намного меньшую, так как факторы, мешающие измерению (погрешность орбит спутников, неоднородность атмосферы и т. д.) в этом случае взаимно вычитаются.
На этом принципе основывается система дифференциальных поправок. Ее суть состоит в выполнении измерений двумя приемниками: один устанавливается в определяемой точке, а другой - в точке с известными координатами - базовой (контрольной) станции. Поскольку расстояние от ИСЗ до приемников значительно больше расстояния между самими приемниками, то считают, что условия приема сигналов (например, состояние ионосферы, через которую они проходят) обоими приемниками практически одинаковы. А, следовательно, величины ошибок также будут близки. Базовая станция устанавливается в точке с известными географическими координатами. Сравнивая известные координаты (полученные в результате прецизионной геодезической съёмки) с измеренными координатами, базовый навигационный приёмник формирует поправки, которые передаются потребителям по каналам связи. Приёмник потребителя учитывает принятые от базовой станции поправки при решении навигационной задачи.
Различают два метода вычисления поправок:
- метод коррекции координат, когда в качестве дифференциальных поправок с базовой станции передают добавки к измеренным в определяемом пункте координатам. Недостатком этого метода является то, что приёмники базового и определяемого пунктов должны работать по одному рабочему созвездию. Это неудобно, поскольку все потребители, использующие дифференциальные поправки, должны работать по одним и тем же ИСЗ;
|
|
|
- метод коррекции навигационных параметров, при использовании которого на базовой станции определяются поправки к измеряемым параметрам (например, псевдодальностям) для всех спутников, которые потенциально могут быть использованы потребителями. Эти поправки передаются потребителям и учитываются при решении навигационной задачи. Недостатком этого метода является повышение сложности аппаратуры потребителей.
Результаты, полученные с помощью дифференциального метода, в значительной степени зависят от расстояния между потребителем и базовой станцией. Применение этого метода наиболее эффективно, когда преобладающими являются систематические ошибки, обусловленные внешними (по отношению к приёмнику) причинами. Эти ошибки в значительной мере компенсируются при близком расположении базовой станции и приёмника потребителя. Поэтому зона обслуживания базовой станции составляет не более 500 км.
Передача дифференциальных поправок от базовой станции к потребителю может осуществляться с помощью телефонной или радиосвязи, по системам спутниковой связи, а также с использованием технологии передачи цифровых данных RDS (Radio Data System) на частотах FM-радиостанций. В настоящее время во многих странах уже действует развитая сеть базовых (дифференциальных) станций, постоянно транслирующих поправки на определённую территорию.
Существуют глобальные системы дифференциальных поправок. Наиболее развитой из подобных систем является WAAS в США. Системы EGNOS в Европе и MSAS в Японии находится на стадии тестирования.

Рисунок 21 Области дейсвия систем дифференциальных поправок
В случае с WAAS, сигнал с поправками ретранслируется с геостационарных спутников, и обрабатывается навигатором с помощью одного из каналов. Это возможно благодаря тому, то сигнал WAAS передается на той же частоте, что и сигнал C/A L1 системы GPS, и имеет схожую структуру кодирования.
|
|
|
Система WAAS содержит более 20 базовых станции (WRS), расположенных на всей территории Соединенных Штатов. Каждая их станций оборудована аппаратурой и специальным программным обеспечением, предназначенным для приема спутниковых сигналов, анализа полученных измерений, вычисления ошибок ионосферы, отклонений траекторий и часов спутников. Эти данные передаются на центральную станцию управления (Master Station - WMS), где повторно обрабатываются и анализируются с учетом измерений, полученных со всех базовых станций сети. Затем корректирующая информация передается на геостационарные спутники и уже оттуда ретранслируется пользователям.
Разработчики системы WAAS предложили специальную координатную сетку поправок, для описания модели ионосферных задержек. Поверхность Земли поделена на 9 зон, каждая из которых содержит 201 точку (последняя - 200). Для каждой точки, с учетом данных базовых станций, моделируется и вычисляется значение ионосферной задержки.
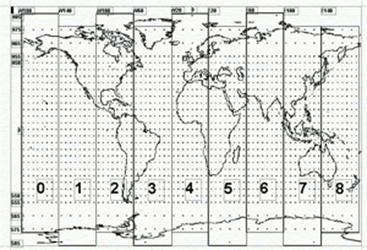
Рисунок 22 - 9 зон дифференциальных поправок
Любой из геостационарных спутников SBAS (системы WAAS, EGNOS и т.д) покрывает ограниченную территории, соответственно он может передавать информацию только для 3-4 зон. Эти ограничения связаны с территориальной принадлежностью систем и расположением сети базовых станций WAAS, определяющих точность моделирования поправок. Считается, что каждая станция эффективно «покрывает» окружающую территорию радиусом 400-500 км. Время передачи данных с базовых станций на геостационарные спутники WAAS составляет несколько секунд. В рабочем режиме, обновление данных связанных с ошибками часов и эфемерид осуществляется с периодом 2 минуты. Данные ионосферные задержек обновляются несколько реже, потому что изменяются во времени значительно медленнее. Для вычисления значение ионосферной ошибки в текущем местоположении приемник использует данные 4-х соседних «узловых» точек. Если текущее местоположение находится в непосредственной близости от «узловой» точки, то дополнительные вычисления могут не понадобиться.
|
|
|
Вторая немаловажная роль систем заключается в контроле целостности и работоспособности спутников. Если по каким то причинам, спутник стал передавать неправильную информацию, либо ошибки навигационных измерений превышают допустимые значения, то ему должен быть присвоен статус «больной», чтобы исключить из алгоритмов вычисления позиции. Все GPS приемники используют информации о «здоровье» спутников из специальных полей альманаха и эфемерид, данные которых корректируются с управляющих наземных станций раз в несколько часов. Соответственно, наземный сегмент системы не может оперативно отреагировать на проблемы в работы спутников, и донести эту информацию до пользователей. Вспомогательная система WAAS может передать эти данные в течение нескольких минут.
Навигационные приемники идентифицируют геостационарные спутники WAAS по номерам, значение которых больше 32. Номера с 1 по 32 строго закреплены за спутниками GPS и привязаны к псевдошумовому коду (PRN).
Начиная с 1993 года была запущена программа EGNOS (European Geostationary Navigation Overlay Services) направленная на улучшение работы систем GPS и ГЛОНАСС на территории Европы.. Система EGNOS использует сигналы спутников навигационных систем NAVSTAR и ГЛОНАСС, двух спутников Inmarsat III (Atlantic Ocean Region - East, Indian Ocean Region) и спутника Artemis, запущенного 12 июля 2001 г. Европейским Космическим Агентством (ЕКА). Предназначение программы - улучшение точности спутниковых навигационных систем для областей применения связанных с безопасностью людей, например, в гражданской авиации и морской навигации в сложных условиях.
В будущем планируется развернуть 34 станции RIMS, главным образом размещенные в Европе, а также в Африке, Малайзии, Южной Америки и Канаде. Несмотря на то, что для номинальной эксплуатации EGNOS достаточно использовать одну контрольную станцию и три станции передачи данных было принято решение об инсталляции 4 станций МСС и 6 станций передачи данных, чтобы гарантировать постоянную работоспособность системы.
Вопросы для самоконтроля:
18. На чем основываются дифференциальные системы спутниковой навигации?
· Использование поправок, вычисляемых базовыми станциями с известными координатами, сигналы до которых проходят через среду, схожую со средой для приемника, который находится поблизости;
· Вычисление усредненного значения координат по результатам измерений от нескольких групп спутников.
19. Глобальные системы дифференциальных поправок осуществляют передачу сигналов приемникам:
· На частотах FM радиостанций;
· С помощью телефонной связи;
· По сети Интернет;
· С геостационарных спутников.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 2033; Нарушение авторских прав?; Мы поможем в написании вашей работы!