КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Модальное управление
|
|
|
|
Лекция 6
Еще один подход к синтезу многомерных систем регулирования дает теория модального управления. Эта теория существенным образом основывается на линейности рассматриваемых моделей; с ее помощью можно устанавливать желаемые значения собственных чисел замкнутой системы. Разберем основные положения модального управления на примере стандартной линейной системы в пространстве состояний
 (1) (2)
(1) (2)
Будем предполагать, что в уравнениях (1), (2) размерности векторов управления и выхода совпадают и равны размерности пространства состояний, что А, В, С — постоянные матрицы и что все собственные числа матрицы А действительны и различны. Эти предположения не являются ограничивающими [12], они служат лишь для упрощения последующих выводов. Будем строить управление в виде пропорциональной обратной связи по выходам
 (103)
(103)
, Напомним теперь определение собственных чисел и векторов. Если — диагональная матрица собственных чисел квадратной матрицы
— диагональная матрица собственных чисел квадратной матрицы
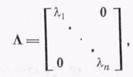 (104)
(104)
то справедливы следующие соотношения:
 (105)
(105)
 (106)
(106)
где R и L—матрицы нормированных собственных векторов (левых и правых) матрицы А, т. е. R и L определяются как решения векторных уравнений:
 (107)
(107)
 (108)
(108)
а собственные числа Я,- являются решениями характеристического уравнения
 (109)
(109)
Все векторы I,- и г* нормируются так, чтобы они были ортонормальны:
 (110)
(110)
или же в матричной форме:
 (111)
(111)
где  (112)
(112)
Умножая (105) слева на L, а (106)—на R и используя (11), получим следующие выражения:
 (113)
(113)
 . (114)
. (114)
Подставляя (103) и (114) в (3.2.1),найдем
 (115)
(115)
Если теперь взять матрицу Gc так, чтобы выполнялось равенство
 (116)
(116)
где диагональная матрица К представляет собой матричный коэффициент усиления в цепи обратной связи
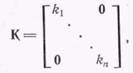 (117)
(117)
а матрицу наблюдения С равной L, то получим уравнение (115) в преобразованном виде
 (118)
(118)
Сделав замену переменных
 (119)
(119)
получим уравнение относительно у
 (120)
(120)
Поскольку диагональная матрица, система (120) разлагается на независимые уравнения первого порядка, решениями которых являются функции
диагональная матрица, система (120) разлагается на независимые уравнения первого порядка, решениями которых являются функции
 (121)
(121)
Возвращаясь к прежним переменным, получим решение в пространстве состояний
 (122)
(122)
Здесь коэффициенты а,- определяются начальными условиями. Изменяя ki, можно как угодно менять собственные числа замкнутой системы, при этом между разными выходами нет взаимосвязей, т. е. изменение коэффициента усиления k, влияет только на i-моду. Это означает, что имеется возможность управлять модами замкнутой системы, причем перекрестные связи между координатами состояния не сказываются на выходе. В качестве недостатков представленной методики следует отметить, что используются только пропорциональные регуляторы, матрица С должна совпадать с L и, как показывает практика, трудна настройка системы. Блок-схема системы приведена на рис. 1.
Если размерность вектора управления т меньше размерности вектора состояния, то модальное управление может быть применено к первым т собственным векторам матрицы А

Рис.1. Блок-схема системы модального регулирования
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 568; Нарушение авторских прав?; Мы поможем в написании вашей работы!