КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основные этапы решения задач ТПР
|
|
|
|
Лекция №2.
Скважинная аппаратура
Для проведения геофизических исследований скважин используется как общая аппаратура и оборудование, применения в большинстве методов ГИС (автоматические каротажные станции.). К автоматической каротажной станции относится:
· источники питания (батарея аккумуляторов);
· приборы для регистрации разности потенциалов и силы тока;
· лебедка, работающая от двигателя автомобиля и предназначенная для спуска и подъема каротажного кабеля в скважину (при каротаже глубоких скважин - более 3 км - лебедка устанавливается на отдельном автомобиле-подъемнике);
· блок-баланс, располагающийся вблизи скважины и предназначенный для направления кабеля в скважину и синхронной передачи глубины расположения индикатора поля на лентопротяжный механизм регистратора;
· одножильный, трехжильный или многожильный кабель в хорошей изоляции.
Изолированные друг от друга жилы кабеля с одной стороны подключаются к кольцам коллектора лебедки, а с другой - к глубинному каротажному зонду, то есть к устройству для измерения тех или иных параметров поля в скважине и трансформации их в электрические импульсы.
В методах электрического каротажа зонд состоит из одного, двух, трех и более свинцовых электродов, укрепленных на кабеле. Такие зонды используются в скважинах, заполненных буровой жидкостью или водой. При работах в сухих скважинах применяются скользящие электроды, каждый из которых состоит из металлической щетки, укрепленной в обойме из изолятора на плоской металлической пружине. Пружины такого "фонарного" зонда прижимают электроды к стенкам скважины.
В наземной автоматической каротажной станции смонтированы электронные усилители и регистраторы. Аналоговую регистрацию проводят на рулонной (редко фото-) бумаге или магнитной ленте.
|
|
|
Современные каротажные станции являются цифровыми. В них сигналы кодируются в двоичном коде и записываются на магнитную ленту. Это обеспечивает возможность машинной обработки информации как с помощью больших ЭВМ, так и компьютеров, входящих в комплект станции.
Несмотря на большое разнообразие задач ТПР, им всем присущи следующие основные этапы:
1. Постановка задачи.
2. Построение мат. модели.
3. Нахождение метода решения.
4. Проверка и корректировка модели.
5. Реализация найденного решения на практике.
Постановка задачи – чрезвычайно ответственный этап ТПР. Первоначально задача формулируется заказчиком- оперирующей стороной. Такая постановка задачи обычно не бывает окончательной. Во время анализа исследуемой операции задача уточняется. Здесь роль исследователя состоит в проведении тщательного обследования объекта, формулировании цели операции, изучении множества факторов, влияющих на результаты. Исследователь операции совместно с заказчиком выделяет совокупность существенных факторов, и уточняет окончательную содержательную постановку задачи.
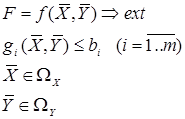
Построение математической модели. Представляет процесс формализации содержательной постановки задачи. В общем случае модели принятия решений сводятся к моделям задач математического программирования вида:
 (1)
(1)
где F- целевая функция (критерий эффективности операции),
 - вектор контролируемых (управляемых) факторов,
- вектор контролируемых (управляемых) факторов,
 - вектор неконтролируемых (неуправляемых) факторов,
- вектор неконтролируемых (неуправляемых) факторов,
 -функция потребления i-того ресурса,
-функция потребления i-того ресурса,
 - количество активных средств i-того ресурса.
- количество активных средств i-того ресурса.
Нахождение метода решения. Для нахождения оптимального решения опт задачи (1) в зависимости от структуры целевой функции F и ограничений применяют те или иные методы теории мат. программирования:
|
|
|
1. Линейное программирование.  ,
,  - линейные функции относительно своих переменных и .
- линейные функции относительно своих переменных и .
2. Нелинейное программирование, если хотя бы одна из , - нелинейная.
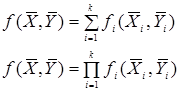
3. Динамическое программирование, если явл. аддитивной (сепарабельной) или мультипликативной функцией своих аргументов.
4. Дискретное (целочисленное) программирование, если на переменные и наложено условие дискретности или целочисленности.
5. Геометрическое программирование, если целевая функция выражается соотношениями  , или
, или 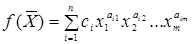 , а ограничения
, а ограничения 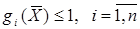 . Здесь коэффициенты Сi и показатели степени аij являются произвольными константами, а независимые переменные хj>0, j=1,m. Функции приведенного вида называются сигналами, а в случае хj>0– позиномами.
. Здесь коэффициенты Сi и показатели степени аij являются произвольными константами, а независимые переменные хj>0, j=1,m. Функции приведенного вида называются сигналами, а в случае хj>0– позиномами.
6. Стохастическое программирование, если вектор - случайная величина, а целевая функция выражается мат. ожиданием. (Вместо рассматривают  ).
).
7. Эвристическое программирование применяют для решения тех задач, в которых точный оптимум найти алгоритмическим путем невозможно из-за большой размерности исходной задачи или отсутствия методов решения. В таких случаях отказываются от поиска оптимального решения и отыскивают удовлетворительное с точки зрения практики решение. При этом пользуются специальными методами-эвристиками, основанными на опыте, знаниях и интуиции исследователя и позволяющими значительно сократить число просматриваемых планов.
Проверка и корректировка модели. В сложных системах ММ лишь частично отражает реальный процесс. Поэтому необходима проверка степени соответствия, или адекватности, между моделью и реальным объектом (процессом). Проверку производят сравнением предсказанного поведения на модели с фактическим (измеренным). Если их разница в пределах допустимого, то модель считается адекватной, в противном случае необходимо скорректировать модель. Корректировка может потребовать дополнительных исследований объекта, уточнения структуры модели. Четыре названных выше этапа повторяют многократно до тех пор, пока будет достигнуто удовлетворительное соответствие между выходом объекта и модели.
Реализация найденного решения на практике. Является важнейшим этапом, завершающим операционное исследование. Полученное решение в виде отчетов, инструкций и рекомендаций представляется заказчику. Опер. сторона принимает окончательное решение с учетом неформализуемой информации.
|
|
|
С точки зрения реализации оптимального решения на практике ТПР занимает особое место в проблематике АСУ различного назначения. Известно, что внедрение АСУ эффективно для решения таких задач управления, которые невозможно было решать при сложившейся ранее практике управления. Поэтому в настоящее время выдвинут т.н. принцип новых задач АСУ, под которым понимается поиск и постановка на производстве действительно новых задач оптимального управления, позволяющих создавать рентабельные АСУ.
ТПР является методологической основой для нахождения таких задач, разработки их моделей и алгоритмов решения, а также для практического внедрения оптимального решения.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 428; Нарушение авторских прав?; Мы поможем в написании вашей работы!