КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Сертификационная оценка устойчивости самоходного скрепера
|
|
|
|
Жесткая, единая конструкция какого-либо тягача, находящегося на опорной поверхности, теряет устойчивость в том случае, когда равнодействующая внешних сил выходит за пределы опорного контура [24]. Опорный контур определяется многоугольником, замыкающим внешние опоры конструкции, а каждая прямая, соединяющая смежные опоры, может стать ребром опрокидывания. Для шарнирно-сочлененных конструкций самоходных скреперов с одноосным тягачом это условие. устойчивости недостаточно, так как в этом случае между двумя жесткими телами (тягач и полуприцепная секция скрепера) имеется шарнир с двумя степенями свободы. Наличие такого шарнира допускает отрыв от опорной поверхности какого-либо одного колеса одной из секций при последующем касании с опорной поверхностью выступающих частей другой секции. При этом тягач, находящийся в положении поворота относительно скреперного ковша, может опрокидываться вперед (рис. 34, а), с отрывом от опоры внешнего по повороту колеса, или назад (рис. 34, б), с отрывом от опоры внутреннего по повороту колеса полуприцепной секции. Направление опрокидывания
зависит от направления действия опрокидывающих нагрузок, от величины и направления склона опорной поверхности.
Статическая устойчивость
Самоходные машины с одноосными тягачами обладают более высокой статической устойчивостью в положении прямолинейного движения, чем в положении поворота. При этом величины предельных значений критического угла складывания вкр и угла склона (Зпр взаимосвязаны. При этих углах продолжение "контактной линии" колес тягача (прямой, соединяющей центры "пятен контакта" колес тягача) проходит через центр "пятна контакта" одного из колес полуприцепной секции машины. В этом положении машина рассматривается с точки зрения устойчивости как единая конструкция с ребром опрокидывания, проходящим через точки контакта с опорой колес тягача и одного из колес полуприцепной секции машины (линия ОК на рис. 35). Рассмотрим сначала условие опрокидывания тягача вперед по его ходу согласно расчетной схеме (рис. 35, а), где стрелкой показано направление склона. Предельный угол склона и критический угол складывания при повороте тягача взаимосвязаны
|
|
|
tgj3np=[(BsineKp-rncos0Kp)(1-k)-rTk]/H, (1)
где
1 D
k=GT/(GT+Gn);
H - высота общего центра тяжести, м;
/ - смещение шарнира сцепного устройства от колесной оси тягача, м;
D - расстояние от шарнира сцепного устройства до колесной оси полуприцепа, м;
В - половина колеи полуприцепа, м;
Гт- расстояние от колесной оси тягача до его центра тяжести, м;
гп - расстояние от колесной оси полуприцепа до его центра
тяжести, м;
Gt-вес тягача, кН;
Ьп - вес полуприцепа, кН.
В случаях, когда центр тяжести тягача или полуприцепа находится за соответствующими колесными осями (назад по ходу машины), координаты Гт и гп в формулу (1) подставляются с обратным знаком.
Для расчета предельного угла склона при опрокидывании назад (рис.35, б) критический угол складывания принимают равным 90°, так как положение с углом складывания более 90° не обеспечивается конструкцией механизма поворота скрепера, что обеспечивает запас устойчивости. Ребром опрокидывания в расчете принимают линию ОК, проходящую через центральную точку "пятна контакта" внешнего по повороту колеса полуприцепа и точку пресечения проекции горизонтальной оси шарнира сцепного устройства с контактной линией колес тягача.
tgj3'np=[(B sin(p'Kp-rncos(p'Kp)(1-k)+ rTk sin<p'Kp]/H, (2)
где J3'np - предельный угол склона в статике при опрокидывании тягача назад;
<р'кр- угол между колесной осью полуприцепа и линией ОК (рис.35, б),
|
|
|

|
|
<р'кр = arctg D/(B+I).
Рис. 34. Опрокидывание самоходной машины с одноосным тягачом: а - вперед; б - назад
Расчет статической устойчивости ведется для четырех расчетных случаев: для опрокидывания тягача вперед и назад с грузом и без груза в ковше скрепера.
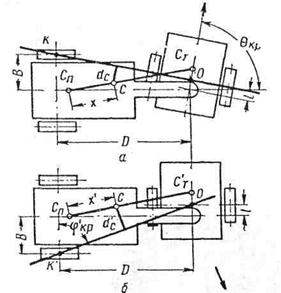
Рис. 35. Схемы машины в расчетных положениях:
а - при опрокидывании вперед;
б - при опрокидывании назад
Динамическая устойчивость
В процессе маневрирования на машину действуют центробежные силы и силы инерции при разгоне и торможении. Наиболее опасным является динамический опрокидывающий момент, возникающий при торможении машины, движущейся в повороте с критическим углом складывания. При торможении под действием инерционных сил машина может начать опрокидывание, вращаясь относительно ребра опрокидывания ОХ (рис. 36, а). Одновременно она некоторое время продолжает вращаться вокруг центра поворота в плане. В зависимости от величины замедления и времени его действия процесс опрокидывания может закончиться до выхода проекции общего центра тяжести за пределы ребра опрокидывания, и тогда система возвращается в исходное положение (в противном случае машина теряет устойчи-
вость). Тягач при этом, наклоняясь вперед, передним брусом подмо-торной рамы опускается на дорогу, а внешнее (по повороту) колесо полуприцепа отрывается от опоры и поднимется вверх (см. рис. 34, а).
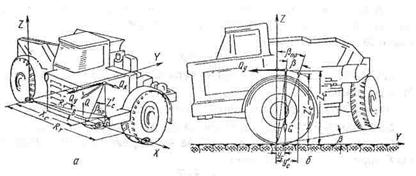
Рис.36.Схема сил, действующих на машину при торможении в повороте: а - до начала опрокидывания; б - в процессе опрокидывания
Дифференциальное уравнение движения анализируемой системы относительно оси X (рис. 36, а)
Т 'Л Л Г ИГ Г\
Ix-J3+MG-MD=0
где /х - момент инерции системы тягач-полуприцеп относительно оси X;
Р - угловое ускорение;
Мв - восстанавливающий момент от сил тяжести; Мо - опрокидывающий динамический момент. Восстанавливающий момент от сил тяжести
MG=Gyc.
Координата центра тяжести системы ус в процессе опрокидывания машины относительно оси X будет изменяться в зависимости от угла поворота /3
yc=y\fiosfi-ZcSinfi, где ус и zc - координаты центра тяжести системы относительно осей у и z при р=0 (т.е. до начала опрокидывания). Тогда получим MG=G(y'ccosj3 - z'csinp) Опрокидывающий момент Мо создается при торможении машины за счет силы инерции Q, действующей в горизонтальной плоскости, проходящей через центр тяжести системы. Направление действия этой силы перпендикулярно к радиусу Rc поворота относительно оси z центра тяжести машины.
|
|
|
MD-=Qyzc, где Qy=Q cos<5 - составляющая силы Q, перпендикулярная к ребру опрокидывания (оси X);
S- угол между радиусом поворота центра тяжести и осью X; zc = ycSinfi + zccos(3 - координата центра тяжести по оси Z Сила инерции Q при постоянной за время действия тормозной силы F определится выражением
Q=mFRTRc/lz, где т - масса системы;
Rt- условный радиус точки приложения силы F относительно центра поворота;
/z - момент инерции системы относительно оси Z, который при повороте системы относительно оси X изменяется в зависимости от угла Р по закону
\2 - lysin2p+l'zcos2p-ispSmBcosji, где /у и \г -моменты инерции системы относительно осей Y и Z до начала опрокидывания;
lyz - центробежный момент инерции системы относительно плоскости VOX до начала опрокидывания.
Приняв обозначение xc=RcCOsS, получим MD=mFRTXc(ycSinp + z'ccosfi)/(I ysin2p+l zcos2p -lyzSinficosfi). Подставив полученные значения Mq и Mq в исходное уравнение движения системы в процессе опрокидывания, получим
1хр + G(y'cCOsj3 -z csinp)-mFRTXc(y cSinp + +z'ccosp)/(l'ySin2p+l'7cos2p -l'yzSinpcosp)=0
Учитывая, что угол /? находится практически в пределах 0°...20°, принимают COSfi^1,sinfi~j3, тогда
I ySin2р+12.cos2p -lyzSinficosp ж / z. Ошибка от такой замены не превышает 6% и, кроме того, пойдет в запас устойчивости. После упрощения и замены
F/W/Z=ac получим
/;/+ G(yc -2ф)-тас(Ус13 + гс)=0. Решение этого уже линейного уравнения имеет вид
/?=С)ею+с2е"к'-рЖ2, где
p=(macz'c-Gy'c)/lx, K2=(macyc+Gzc)/Ix. Процесс опрокидывания рассматривают как двухэтапный: от момента начала торможения до его окончания и после окончания действия торможения. Общее решение дифференциального уравнения для обоих этапов будет одинаковым. Изменятся только постоянные коэффициенты Ci и Сг, определяемые при рассмотрении начальных условий: для первого этапа ti=0, /?/=0, Д=0, для второго этапа tu=0,
Рн-fh, Р~Рт, где (Зт и Вт- угол и угловая скорость опрокидывания в конце первого этапа.
|
|
|
В результате имеем для первого этапа
0FP(chKt, - 1)/К2, /3i=(pshKti)/K, j3T=p(chKtT - 1)/К2, /3T=(pshKtT)/K :
для второго этапа
(iirpTishKi tu)/^ +y'o/'zc - (y'c/z'c -/Зт) chKi t„,
(31г13т(с1г)К4н) - My Л с -fflshKitu,
где
\Gz
¥ — £_
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 329; Нарушение авторских прав?; Мы поможем в написании вашей работы!