КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Методика определения поправок гирокурсоуказателей
Автономных МСН
Содержание и организация работ по определению поправок
ОПРЕДЕЛЕНИЯ ПОПРАВОК АВТОНОМНЫХ МСН
ЛЕКЦИЯ 6. ОРГАНИЗАЦИЯ И МЕТОДИКА
В о п р о с ы:
1. Содержание и организация работ по определению поправок автономных МСН.
2. Методика определения поправок гирокурсоуказателей.
3. Методика калибровки относительных лагов.
4. Методика контроля точности работы автопрокладчиков.
Определение поправок автономных МСН является одним из важнейших элементов их технического обслуживания. К основным работам по определению поправок автономных МСН относятся:
- определение постоянной поправки гирокурсоуказателей;
- определение остаточного дрейфа гироазимутов;
- калибровка относительных лагов;
- контроль точности работы автопрокладчиков;
- компенсация девиации и определение остаточной девиации магнитных компасов.
Все указанные работы выполняются под руководством и при личном участии командира БЧ-1.
Определение постоянной поправки гирокурсоуказателей, остаточного дрейфа гироазимутов и контроль точности работы автопрокладчиков выполняются при стоянке корабля в базе. Эти работы должны производиться ежемесячно, а для гирокурсоуказателей и гироазимутов, кроме того, после замены их чувствительных элементов и перед каждым выходом корабля в море.
Калибровка относительных лагов, компенсация девиации и определение остаточной девиации магнитных компасов выполняются в специальных полигонах после подачи предварительных заявок (на мерной линии или в девиационном полигоне соответственно). Эти работы должны производиться ежегодно. Калибровка относительных лагов, кроме того, выполняется после замены приемных устройств лагов или гребных винтов корабля, а также после его докования. Компенсация девиации и определение остаточной девиации магнитных компасов, кроме того, выполняется после докования или размагничивания корабля, при изменении магнитной широты более 8o или в случае отклонения наблюденного (фактического) значения девиации от табличного значения более 1o.
Результаты определения поправок автономных МСН фиксируются в формулярах МСН, контрольном листе результатов технического обслуживания МСН (КЛТО) и журнале электронавигационных приборов (журнале ЭНП). Результаты калибровки относительных лагов, компенсации девиации и определения остаточной девиации магнитных компасов, кроме того, заносятся в навигационный журнал и рабочие таблицы штурмана (РТШ).
Определение поправок гирокурсоуказателей подразделяется на определение их постоянной поправки и определение остаточного дрейфа гироазимутов. Определение постоянной поправки гирокурсоуказателей выполняется для гирокомпасов с непосредственным управлением (гирокомпасов типа «Курс») и гирокурсоуказателей типа ГКУ (при их работе в режиме ГК). Определение остаточного дрейфа гироазимутов выполняется для гироазимутов и гирокурсоуказателей типа ГКУ (при их работе в режиме ГА).
Определение постоянной поправки гирокурсоуказателей. Определение постоянной поправки гирокомпасов типа «Курс» и гирокурсоуказателей типа ГКУ (при их работе в режиме ГК) может выполняться различными способами:
- способом пеленгования отдаленного берегового ориентира;
- способом пеленгования астронавигационного ориентира;
- способом взаимного пеленгования с теодолитным постом;
- способом сравнения гирокомпасного курса с курсом, вырабатываемым ИНС.
Наиболее простым, удобным и широко применяемым на практике является способ пеленгования отдаленного берегового ориентира. Методики определения постоянной поправки гирокурсоуказателей данным способом (как, впрочем, и другими способами) в основном одинаковы и базируются на обобщенной методике определения поправок МСН, изложенной в лекции 3. Различия методик обусловлены двумя факторами.
Во-первых, определение постоянной поправки следует начинать после прихода ЧЭ гирокурсоуказателей в меридиан, т.е. в установившемся режиме работы. Для гирокомпасов типа «Курс» время прихода ЧЭ в меридиан составляет 4 – 6 ч, а для гирокурсоуказателей типа ГКУ – 0,5 – 1 ч.
Во-вторых, отличается общее время измерений Т И, определяемое значением периода затухающих колебаний ЧЭ. Для гирокомпасов типа «Курс» оно составляет 2 ч, а для гирокурсоуказателей типа ГКУ – от 2 до 3,5 ч (в зависимости от широты места).
В остальном методика определения постоянной поправки указанных гирокурсоуказателей одинакова и заключается в следующем.
В качестве объекта пеленгования выбирается хорошо видимый береговой ориентир, нанесенный на морскую навигационную карту или план и удаленный от корабля на расстояние не менее 2 миль. При известных координатах корабля (места установки пеленгаторного репитера) и ориентира может быть определено истинное направление на указанный ориентир – истинный пеленг ИП. Значение ИП с точностью до 0,1o снимается с карты (плана) с помощью прокладочного инструмента или протрактора либо рассчитывается по формуле:
 (6.1)
(6.1)
где РШ – разность широт ориентира и корабля, РД – разность долгот ориентира и корабля, ОТШ – отшествие.
Пеленгование отдаленного берегового ориентира целесообразно производить сериями по 5 – 7 замеров с интервалом  между сериями, равным 10 – 15 мин. По единичным измерениям компасных пеленгов КПi на ориентир, взятым в моменты Тi (i – номер замера в серии), для каждой серии измерений рассчитываются средние значения компасных пеленгов КПj и моментов Тj в серии (j – номер серии):
между сериями, равным 10 – 15 мин. По единичным измерениям компасных пеленгов КПi на ориентир, взятым в моменты Тi (i – номер замера в серии), для каждой серии измерений рассчитываются средние значения компасных пеленгов КПj и моментов Тj в серии (j – номер серии):
 и
и  (6.2)
(6.2)
где n – количество замеров в серии.
Для каждой серии измерений рассчитываются также значения мгновенных поправок Δ ГКj гирокурсоуказателей:
Δ ГКj = ИП – (КПj + Δ ДП), (6.3)
где Δ ДП – поправка за невыставку в диаметральной плоскости (ДП) корабля пеленгаторного репитера.
Значения мгновенных поправок Δ ГКj, соответствующие моментам Тj, наносятся на график (см. рис. 6.1) и производится его обработка. Полученные точки соединяются плавной кривой (сплошная линия на рис. 6.1) и проводится горизонтальная осредняющая линия (по принципу «равенства площадей»). Осредняющая линия показана на рис. 6.1 пунктиром. Измерив ее отстояние от оси абсцисс, получим значение постоянной поправки Δ ГК П гирокурсоуказателя (если осредняющая линия проходит выше оси абсцисс, то постоянная поправка имеет знак «+», а если она проходит ниже оси абсцисс, то поправка Δ ГК П имеет знак «-»).
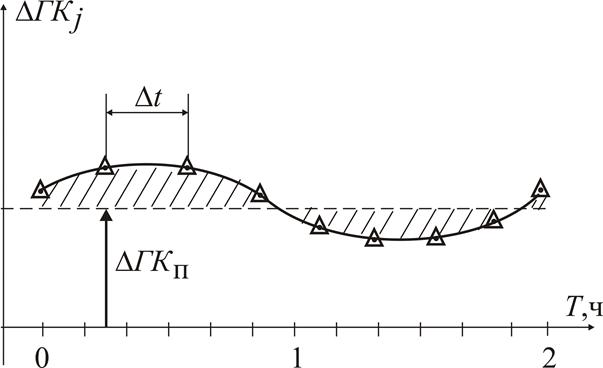
Рис.6.1.Определение постоянной поправки гирокурсоуказателей
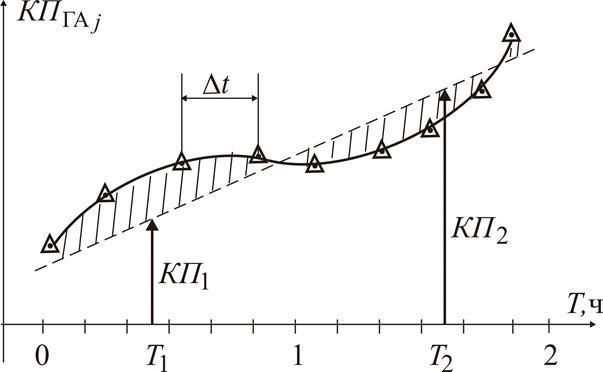
Рис.6.2. Определение остаточного дрейфа гироазимутов
В случае, когда значение постоянной поправки Δ ГК П превышает допустимое значение Δ ГК Д (оно указывается в формуляре), производится регулировка гирокурсоуказателя и повторное определение его постоянной поправки.
Постоянная поправка Δ ГК П гирокурсоуказателей может быть определена и аналитически по формуле:
 (6.4)
(6.4)
где N – количество серий измерений.
Методики определения постоянной поправки гирокурсоуказателей другими способами ввиду недостатка времени в данной лекции не рассматриваются.
Определение остаточного дрейфа гироазимутов. Определение остаточного дрейфа гироазимутов следует выполнять в установившемся режиме их работы. В частности, для двухрежимных гирокурсоуказателей типа ГКУ данную работу рекомендуется производить в режиме ГА только после их предварительной работы в режиме ГК не менее 6 ч.
Определение остаточного дрейфа гироазимутов может выполняться различными способами:
- способом пеленгования отдаленного берегового ориентира;
- способом сравнения гироазимутального и гирокомпасного курсов;
- способом определения дрейфа по мгновенным поправкам гироазимутального курса.
Наиболее простым, удобным и широко применяемым на практике является способ пеленгования отдаленного берегового ориентира, который должен быть хорошо наблюдаем и удален от корабля на расстояние не менее 2 миль. Знание координат ориентира в данном случае необязательно.
Пеленгование отдаленного берегового ориентира целесообразно производить сериями по 5 - 7 замеров с интервалом между сериями, равным 10 - 15 мин. Общее время измерений должно быть не менее 2 ч. По единичным измерениям компасных гироазимутальных пеленгов КП ГА i на ориентир, взятым в моменты Тi (i – номер замера в серии), для каждой серии измерений рассчитываются средние значения компасных гироазимутальных пеленгов КП ГА j и моментов Тj в серии (j – номер серии):
 и
и  (6.5)
(6.5)
где n – количество замеров в серии.
Значения компасных гироазимутальных пеленгов КП ГА j, соответствующие моментам Тj, наносятся на график (см. рис.6.2) и производится его обработка. Полученные точки соединяются плавной кривой (сплошная линия на рис. 6.2) и проводится наклонная осредняющая линия (по принципу «равенства площадей»). Осредняющая линия показана на рис. 6.2 пунктиром.
Остаточный дрейф r гироазимутов рассчитывается по двум значениям осредненных компасных пеленгов КП 1 и КП 2, снятым с осредняющей линии графика для двух произвольных моментов Т 1 и Т 2:
 (6.6)
(6.6)
В случае, когда значение остаточного дрейфа r гироазимута превышает допустимое значение дрейфа r Д (оно указывается в формуляре и обычно составляет 0,5 0/ч), производится регулировка гироазимута и повторное определение его остаточного дрейфа.
Для компенсации остаточного дрейфа гироазимутов необходимо учитывать поправку на дрейф Δ r, которая равна ему по величине, но противоположна по знаку:
Δ r = - r. (6.7)
Методики определения остаточного дрейфа гироазимутов другими способами в данной лекции не рассматриваются.
|
Дата добавления: 2014-01-07; Просмотров: 2311; Нарушение авторских прав?; Мы поможем в написании вашей работы!