КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Система управляемый выпрямитель
с зависимым инвертором тока (ПЧ с ЗИТ-СД).
ПЧ с ЗИТ выпускается для управления синхронными двигателями (СД) средней и большой мощности. Для управления используется синхронная машина, работающая в перевозбужденном состоянии. При этом диапазон регулирования скорости ограничивается внизу диапазона при малых напряжениях и составляет 10÷1.
Серийно выпускаются ПЧ в трансформаторном и без трансформаторном исполнении. КЧ серии ПЧВН, ПЧВС.
Коммутация тиристоров инвертора – естественная за счет ЭДС перевозбудимого СД.
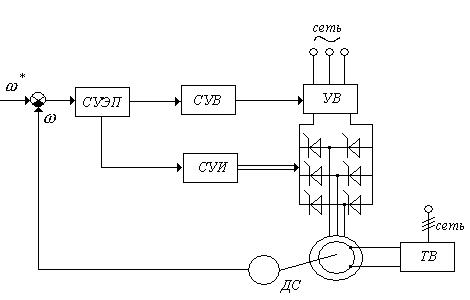
Тиристорный возбудитель серии ТЕ-8.
Тиристорный возбудитель обеспечивает следующие защиты:
· От внешних и внутренних коротких замыканий;
· От длительного асинхронного хода;
· От обрыва обмотки ротора или ОВ;
· От выпадения двигателя из сихронизма.
При срабатывании защит двигатель отключается от сети. Тиристорный возбудитель – ТЕ-8 обеспечивает следующие режимы работы:
· Стабилизация тока возбуждения при изменении напряжения питания сети и температуры;
· Форсировка тока возбуждения при резком перепаде напряжения сети;
· Поддержание cos φ сети. Обеспечивает перевозбуждение.
· Поддержание напряжения сети в периоды повышения напряжения при минимальной нагрузке;
· Снижение потерь синхронной машины илирегулирование реактивного тока;
· Демпфирование колебаний машины при изменении момента на валу двигателя.;
· Повышение устойчивости при увеличении нагрузки.
Реализация этих функций системой управления осуществляется в статическом режиме без переключения на другой режим во время работы.
Силовая часть ТЕ-8 – это управляемый выпрямитель с СИФУ.
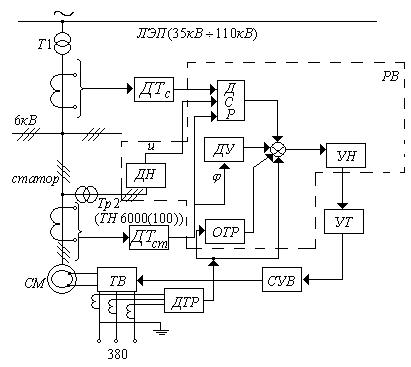
ДТС – датчик сети,
ДТСТ – датчик статора,
ДТР – датчик ротора;
ДСР – датчик статического режима;
ДУ – датчик фазового угла;
ДН – датчик напряжения;
УН, УТ – усилитель напряжения, тока;
ОТР – ограничитель тока ротора;
ТВ – тиристорный возбудитель;
СУВ – система управления возбудителем;
РВ – регулятор возбуждения.
Работа схемы:
Основным управляющим элементом в системе регулирования возбуждения является регулятор возбуждения. В зависимости от выбранного закона регулирования в датчике статического режима происходит сравнение сигналов сети и статора, напряжения и фазового угла. Управляющий сигнал поступает с сумматор(усилитель напряжения), где сравнивается с сигналами состояния ротора. Полученный сигнал усиливается в УТ и поступает на СИФУ тиристорного возбудителя.
Микропроцессорная система управления машинами переменного тока.
Практически все современные преобразователи частоты используют МП систему управления, которая позволяет решить несколько важных задач:
1. точное измерение скорости и положения;
2. реализация статических нелинейностей;
3. позволяет осуществить точное суммирование частот сигналов имеющих различное напряжение;
4. реализация защит двигателя и преобразователя.
Недостаток: необходимость высокого быстродействия для реализации замкнутого контура регулирования тока.
МПСУ используют математические модели СД или АД для определения сигналов ψs или ротора, Едв или скорости, Мэм или составляющая тока по осям во вращающейся системе координат. Как правило, используются статические идеальные математические модели. Для определения управляющих сигналов математической модели двигателя используются фазные значения токов и напряжения, а также скорости.
Математическая модель АД в координатах потокосцепления ротора.
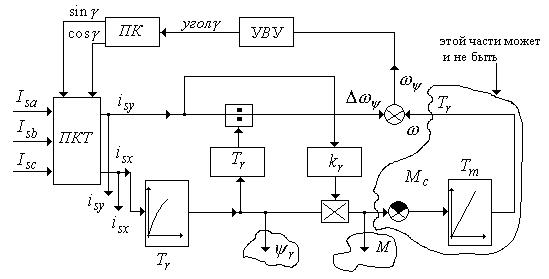
На основании измеренных сигналов фазных значений токов в преобразователе координат происходит двойное преобразование: из трехфазной в двухфазную (α, β), из двухфазной во вращающуюся (х,у). Для перехода во вращающуюся систему координат используются сигналы sinγ и сosγ, определяемые в вычислителе угла. Наличие ДС упрощает систему, где синхронная скорость вращения поля определяется как сумма скорости вращения ротора и абсолютного скольжения:
ωψ=ω+Δωψ.
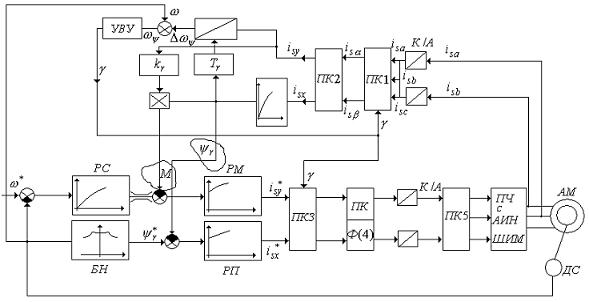
МП система управления АД с моделью АД.
В системе используются преобразователи частоты с автономным инвертором напряжения с ШИМ.
ПК – преобразователь координат;
БН – блок нелинейности (2-х зонное регулирование магнитного потока);
“ПИ” - РС – РМ – РП – регуляторы скорости, момента, потокосцепления;
Ф – фильтр – фильтрация выходного сигнала.
Работа схемы:
ПЧ с ШИМ управляется МП системой управления, которая состоит из двух частей: математическая модель АД, входными сигналами которой является два фазных тока и скорость, а выходными – момент, ψr и угол между системами координат. Вторая часть МПСУ состоит из замкнутых контуров регулирования скорости, момента и потокосцепления ротора. Непосредственное управление преобразователем осуществляется в аналоговом виде, где реализован контур регулирования тока и СИФУ. ЭП обеспечивает работу во всех четырех квадрантах и реализует закон векторного управления.
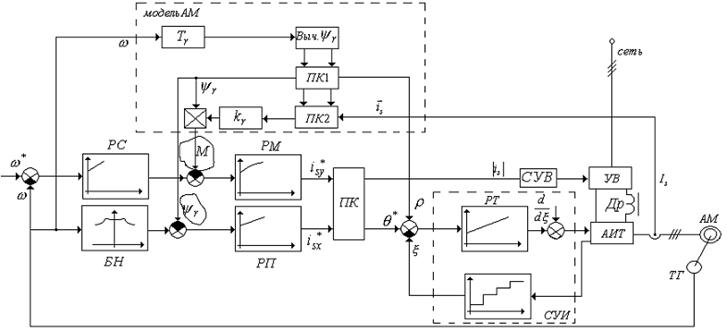
МПСУ АМ ПЧ с АИТока.
МПСУ преобразователями частоты с АИТ использует математическое описание АМ и реализует частотно-токовое управление с законом ψr = const.
Необходимо найти момент и потокосцепление ротора.
Система реализует частотно-токовое управление с ПЧ с АИТ. Управление АМ осуществляется по двум каналам: первый канал – канал управления модулем тока статора (is), включающий в себя РС, РМ, ПК с СИВ; второй канал – контур регулирования аргумента, включает в себя РП, ПК, СУН. Для повышения качества управления в системе используется статическая модель АД, с которой снимается два сигнала: момент и потокосцепление. Система управления инвертором производит суммирование сигналов угла θ, составляющих ρ и коммутацию функции ξ. С дискретой в 60 эл.0 осуществляется коммутация тиристоров инвертора, определяющих частоту вращения АМ. В СУИ входят блоки: РТ с обратной связью по коммутационной функции. Необходимость введения коммутационной функции и её производной обеспечивает плавное вращение двигателя внизу диапазона регулирования скорости.
Микропроцессорная система управления синхронной машиной.
МПСУ СМ обеспечивает регулирования момента с использованием составляющей тока по одной из осей. Если используется машина с постоянными магнитами, то в СУ отсутствует контур регулирования магнитного потока.
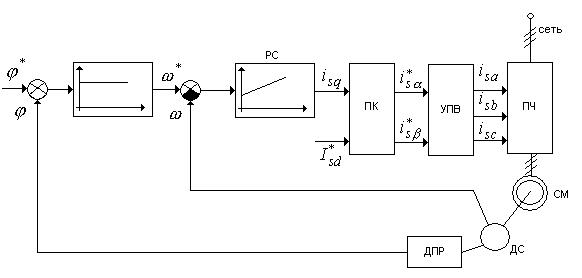
Система управления синхронной машиной осуществляется по составляющей тока статора (isq), определяющей электромагнитный момент синхронной машины. В отличии от АМ система требует пространственной ориентации тока статора, т.к. вектор системы координат (d, q) вращается синхронно с сетью. Наличие постоянных магнитов вместо ОВ, позволяет избавиться от контура регулирования потока. ПЧ с АИН ШИМ или ПЧ с непосредственной связью (НПЧ).
Фазовое управление асинхронной машиной.
Фазовое управление АМ осуществляет регулирование напряжения поступающее на статорную обмотку АД. Существует большое количество преобразователей осуществляющие фазовое регулирование. Отечественной производительностью выпускаются две модификации тиристорные станции управления, реверсивные ТСУр с режимом рекуперации энергии в сеть. В последнее время нашло применение система с использованием активных выпрямителей в цепи статора в АД. Две модификации: активный выпрямитель напряжения, активный выпрямитель тока(АВТ). Использование этих выпрямителей позволяет использовать регулировать не только потребление активной мощности, но и реактивной. В качестве силовой части активного выпрямителя используются полностью управляемые силовые ключи - транзисторы (IGВТ – собранная по мостовой схеме включения). Для непрерывного протекания тока в силовой части параллельно тиристору включается шунтирующий диод. Для снижения пульсаций преобразователя и влияния их на питающую сеть используется буферный дроссель, который включается между сетью и преобразователем.
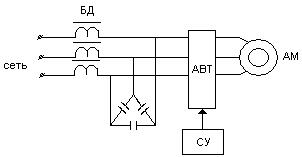
В случае использования АВТ силовая схема выглядит следующим образом:
При изменении питающего напряжения электромагнитный момент изменяется пропорционально квадрату напряжения, поэтому при пуске двигателя необходимо уменьшить нагрузку на валу двигателя или отключать её полностью. Существуют системы плавного пуска двигателей, которые позволяют на момент пуска создать пусковой момент необходимый для начального вращения АД. Механическая характеристика АМ
где I1=I0+(-I2), (Iнагр=-I2)
Ток статора состоит из тока холостого хода и предельной нагрузки.
I1=I0≡Фм
I0↓≡Фм↓≡U↓
В системе плавного пуска для создания Мпуск , в начальный момент пропускают постоянное напряжение не большой величины и намагничивают систему. Осуществляют форсировку по напряжению т.о., чтобы ток двигателя не превышал номинальное значение. Двигатель начинает вращаться, а СУ плавно изменяет питающее напряжение. Использование МПСУ позволяет по точкам формировать напряжение на обмотках статора. Кривая формирования питающего напряжения: Uф – напряжение форсировки.
Системы фазового управления позволяют работать АМ устойчиво на неустойчивой части механической характеристики за счет использования замкнутой системы по скорости двигателя. Работа с большим значением скольжения приводит к увеличению потерь в двигателе ΔРэл2↓=ΔPэмS↓, поэтому принимаем меры по охлаждению или увеличению мощности двигателя.
Классическая схема тиристорной станции управления. Она имеет два контура управления: внешний контур регулирования скорости, внутренний – контур регулирования тока.
Система управления тиристорной станцией.
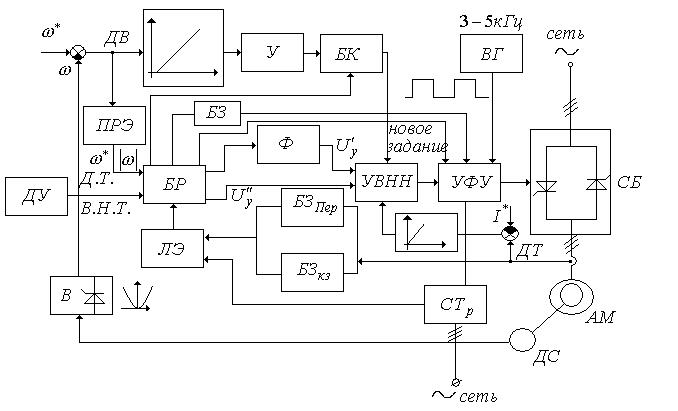
ПУ – пульт управления - кнопочная станция, определяющая режим работы. Двигательный вперед – назад и тормозной (В.Н.Т).
ПРЭ – пороговый элемент работает на разности сигналов задания и ОС по скорости. Если разность малая или отрицательная, то сигнал проходит через ПРЭ и станция переходит в режим динамического торможения. Если разность большая, то станция работает в двигательном режиме.
БК – бесконтактный ключи или коммутатор.
У – усилитель.
В – выпрямитель.
УВНН – устройство вычленения низкого напряжения.
УФУ или СИФУ – устройство фазового управления, на вход которого поступают сигналы управления в зависимости от режима работы: ДТ – новое задание или реверс; сигналы с ВГ – высокого частотного генератора для уменьшения габаритов импульсных трансформаторов и сигнал с синхронизационных трансформаторов.
БР – блок режимов – определят режим работы Д-Т, ДС с реверсом.
Система защит:
ЛЭ – логический элемент, блокирующий сигнал блока режима.
ДТ – датчик тока + 3 защиты.
БЗ пер – блок защиты от перегрузки (тепловая защита).
БЗ КЗ - блок защиты от КЗ.
И устройство ограничения ограничивает угол управления УВНН (сумматор с I*).
ЗИ – задатчик интенсивности.
0.01 БЗ – блок задержки. 0.01 – время задержки.
Эта станция может быть дополнена ОС по скорости двигателя обеспечивающего стабильную работу на неустойчивой части механической характеристики. Реверсивная станция имеет обратную группу вентилей и позволяет осуществлять рекуперацию энергии в сеть.
ЭП «ЭТ6»
|
ЭП «ЭТ6» выпускается на Рн= до 11 кВт, для двигателей главного движения.
Рн=0,75 – 3 кВт для приводов подач.
Полоса пропускания для главного движения = 40 Гц.
Система управления ЭД-м «ЭТ-6»
Работа схемы:
В СУ используется «ПИ РС и РТ»; для ограничения сигнала управления используется БО блок ограничения, который ограничивает выходной сигнал с РТ. Для ограничения выходного сигнала напряжения управления при возмущающем воздействии в контуре регулирования тока используется система ограничения производной. Это дифференциальная цепочка или ОС по производной тока со стабилитроном, который формирует положительную ОС поступающую на РТ, т.о. в системе ограничивается???. Проверяем чередование фаз в системе. Напряжение сети должно быть с ФИ1-ФИ6.
Для развязки силовой цепи и цепи управления в системе используются магнито-диоды и Т2 с фильтрацией выходного сигнала. Работоспособность системы определятся по работе силовой части (отдельных групп ветвей ТПЯ-В, ТПЯ-Н тиристорный преобразователь якоря вперед, назад).
Визуальный осмотр силовой части:
Наличие щеток, правильность подключения ОЯ и ОВ. Правильность работы проверяем следующим образом: отключаем СР-РТ И РС и напряжение управления с БП - блока питания подаем на СИФУ предварительно подав напряжнение на БВ – блок возбуждения. Меняя полярность напряжения задания проверяем работу отдельных групп вентилей вперед или назад наблюдая за вращением двигателя.
Настройка контура регулирования тока:
Отключаем ОВ, напряжение управления с БП подаем на вход РТ в пределах 1-2 В при отключенной системе ограничения производной, изменение сигнала задания приводит к увеличению тока цепи якоря, величину которого определяем при помощи амперметра или осциллографа с ДТ. Определятся правильность подключения ОС по току (т.е. полярность). Убрали интегральную составляющую в РТ – что самое главное. Наладку делаем с «П»–РТ. Осуществляем настройку на СО на СО или МО, наблюдаем кривую ПП с ДТ. Даем ступень ПП на осциллографе с ДТ. Подобрали коэффициент. Убираем перемычку с емкости и повторяем все с «ПИ» РТ. Добиваемся нужного ПП.
Подключаем ОВ. Сигнал задания на вход РС у которого убираем интегрирующую составляющую и существенно понижаем коэффициент передачи. Плавно подаем U задающее на вход РС.
1. Изменяя сигнал задания определяем полярность ОС по скорости;
2. Подключаем осциллограф на выход Тг и ступенчато изменяя сигнал задания скорости определяем кривую ПП и добиваемся подбором коэффициента передачи на МО и СО;
3. Проверяем работоспособность на всем диапазоне;
4. Вводим интегрирующую составляющую и добиваемся кривой ПП соответствующей МО или СО при ступенчатом воздействии.
5. Настраиваем ограничение на выходе РС, которое ограничивает предельно допустимое ускорение, при изменении управляющего воздействия.
В режиме нагрузки, при изменении ее настраиваем СОП – систему ограничении производной.
|
|
Дата добавления: 2014-01-07; Просмотров: 847; Нарушение авторских прав?; Мы поможем в написании вашей работы!