КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основной закон зацепления. Идея основной теоремы зацепления была высказана английским ученым Р
|
|
|
|
Идея основной теоремы зацепления была высказана английским ученым Р. Виллисом в 1841 г. при разработке классификации механизмов на основе на основе анализа отношения скоростей звеньев.
Пусть передача между двумя осями О1 и О2 с угловыми скоростями ω1 и ω2 осуществляется посредством 2-х взаимоогибаемых кривых К1 и К2 (рисунок 4.22, а).
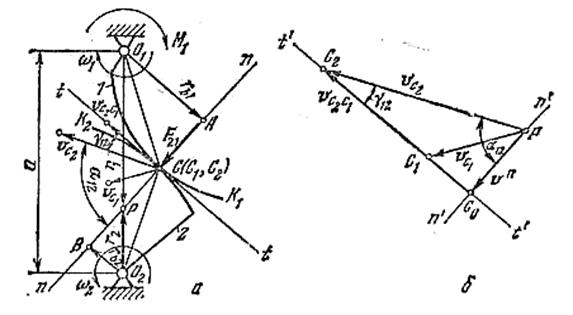
а - схема механизма с высшей парой; б - план скоростей.
Рисунок 4.22 - К выводу основного закона зацепления
Проведем в точке соприкосновения С кривых К1 и К2 и нормаль n-n и касательную t-t к этим кривым. В точке С соединяются две кривые, поэтому будут две точки: С1, принадлежащая кривой К1, и С2, принадлежащая кривой К2. Скорость точки С1 известна по величине и направлению. Определим скорость точки С2 методом планов (см. гл.2, §2.4, п.2.4.2). Выбираем масштабный коэффициент плана сил μV = VC1/[PVC1] = ( ). Записываем векторное уравнение плана скоростей
). Записываем векторное уравнение плана скоростей
 VC2=VC1+VC2C1|| t-t
VC2=VC1+VC2C1|| t-t
VC2=VO2+VC2O2^ СО2.
Построенный план скоростей представлен на рисунке 4.22, б.
Из точек О1 и О2 опускаем на нормаль перпендикуляры О1А и О2В, а из полюса плана скоростей опустим перпендикуляр РVco на линию действия скорости VC2C1. Отрезок PVco представляет собой нормальную составляющую Vn векторов скоростей VC1 и VC2, т.е. VCo=VA± VB=Vn.
Рассмотрим треугольники ΔО1АС1 и ΔРVСоС1 – они подобны по взаимно-перпендикулярным сторонам, т.е.
ΔО1АС1~ΔРVСоС1.
Аналогично ΔО2BС2~ΔРVСоС2.
Исходя из этого, составим пропорции:
О1А/О1С1=[РVСо]/РVС1;
О2В/О2С2=[РVСо]/РVС2.
Выразим из этих уравнений РVСо:
РVСо=О1А [РVС1]/О1С1;
РVСо=О2В [РVС2]/О2С2.
Эти равенства можно записать в действительных скоростях:
VСо = О1А VС1/О1С1;
VСо= О2В VС2/О2С2.
Приравняем правые части уравнений:
О1А VС1/О1С1=О2В VС2/О2С2.
Скорости точек С1 и С2 вычисляются по формулам VС1 =ω1О1С1, VС2=ω2 О2С2. С учетом этого, имеем:
О1А ω1 О1С1/О1С1 = О2В ω2 О2С2/О2С2.
После сокращения, получим следующее выражение
О1А ω1 = О2В ω2.
Отношение угловых скоростей есть передаточное отношение. В итоге получим формулу:
ω1/ω2 = О2В/О1А = RW2/RW1 = z2/z1 = U12, (4.15)
где RW1 и RW2 - радиусы начальных окружностей колес.
Равенство (4.15) называется основным законом зацепления, который гласит: нормаль в точке касания высшей кинематической пары качения и скольжения делит линию центров на части, обратно пропорциональные угловым скоростям.
Точка р, делящая линию центров О1О2 на части, обратно пропорциональные угловым скоростям, называется полюсом зацепления. Тогда межосевое расстояние a W будет равно
aW = [О1О2] = RW1 + RW2. (4.16)
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 377; Нарушение авторских прав?; Мы поможем в написании вашей работы!