КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Структура механизмов. В состав механизмов входят звенья, которые образуют кинематические пары, кинематические цепи
СТРУКТУРА И КЛАССИФИКАЦИЯ МЕХАНИЗМОВ
В состав механизмов входят звенья, которые образуют кинематические пары, кинематические цепи.
Чтобы из кинематической цепи получить механизм, необходимо:
– одно звено сделать неподвижным, т.е. образовать станину (стойку);
–одному или нескольким звеньям задать закон движения (сделать ведущими) таким образом, чтобы все остальные звенья совершали требуемые целесообразные движения.
Если точки всех звеньев могут перемещаться только в параллельных плоскостях, то кинематическая цепь называется плоской. В пространственных цепях точки описывают либо пространственные кривые, либо плоские кривые расположенные в различных непараллельных плоскостях.
Механизмом называют замкнутую цепь, имеющую стойку, в котором движение одного звена определяет движение всех остальных звеньев.
Условное изображение механизма, выполненное в масштабе, называется
кинематической схемой механизма.
Звенья кинематических цепей механизмов должны обладать подвижностью - определенностью движения относительно неподвижной системы координат, связанной со стойкой. Без такой определенности нельзя управлять работой механизмов. Определенность относительных движений звеньев в кинематических парах определяется классом последних. Наличие кинематических пар разных классов налагают ограничения на характер движения звеньев относительно стойки.
Подвижность кинематической цепи оценивается степенью подвижности кинематической схемы механизма,– числом обобщенных координат (числом степеней свободы механизма), требуемых для описания определенности движения всех звеньев. Для определения числа степеней свободы механизма, необходимо из суммы степеней свободы всех звеньев до их вхождении в кинематические пары исключить те степени свободы, которые отнимаются вхождением звеньев в кинематические пары. В инженерной практике применяются структурные формулы, с помощью которых степень подвижности W определяется по количеству подвижных звеньев « » и количеству кинематических пар разных классов Р¡, где Р¡ - класс кинематической пары
» и количеству кинематических пар разных классов Р¡, где Р¡ - класс кинематической пары
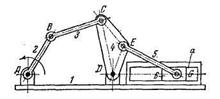
Рис Модель шестизвенного плоского механизма
Механизм должен иметь число начальных звеньев, равное числу его степеней свободы. В нашем случае W = 1, имеем одно начальное звено № 2, т.к. после присоединения звеньев 3, 4, 5, 6 число степеней свободы всего механизма осталось равным W = 1, то, следовательно, кинематическая цепь состоящая из звеньев 3, 4, 5, 6, присоединенных к начальному звену 2 и стойке 1, обладает нулевой степенью свободы относительно тех звеньев, к которым эта цепь присоединяется.
Количество начальных механизмов, содержащихся в сложном механизме должно быть равно числу степени подвижности механизма.
Число степеней свободы механизма – это число степеней свободы всей кинематической цепи относительно неподвижного звена (стойки).
Для пространственной кинематической цепи в общем виде условно обозначим:
количество подвижных звеньев – n,
количество степеней свободы всех этих звеньев – 6n,
количество кинематических пар 5-го класса – P5,
количество связей, наложенных кинематическими парами 5-го класса на звенья, входящие в них, – 5Р 5,
количество кинематических пар 4-го класса – Р4,
количество связей, наложенных кинематическими парами 4-го класса на звенья, входящие в них, – 4Р4 и т.д.
|
Это структурная формула пространственной кинематической цепи, или формула Малышева, получена П.И. Сомовым в 1887 году и развита А.П. Малышевым в 1923 году.
Величину W называют степенью подвижности механизма (если из кинематической цепи образован механизм).
|
Эту формулу называют формулой П.Л. Чебышева (1869). Она может быть получена из формулы Малышева при условии, что на плоскости тело обладает не шестью, а тремя степенями свободы:
W = (6 – 3)n – (5 – 3)P5 – (4 – 3) P4.
Величина W показывает, сколько должно быть у механизма ведущих звеньев (если W = 1 – одно, W = 2 – два ведущих звена и т.д.).
Введем понятие о группах Ассура
Кинематическая цепь, обладающая нулевой степенью подвижности и неделящаяся на более простые группы называется группой Ассура.
Группа Ассура II класса делится на виды: Вид группы определяется сочетанием вращательных и поступательных пар в группе:
 1 вид (ВВВ) 2 вид (ВВП) 3 вид (ВПВ) 4 вид (ПВП) 5 вид (ВПП)
1 вид (ВВВ) 2 вид (ВВП) 3 вид (ВПВ) 4 вид (ПВП) 5 вид (ВПП)
|
Дата добавления: 2014-01-20; Просмотров: 900; Нарушение авторских прав?; Мы поможем в написании вашей работы!