КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Радиолокационные системы управления воздушным движением
Тактико-технические характеристики РЛС ГА
1.1. Тактические характеристики РЛС
Все многообразие характеристик РЛС можно разделить на три группы: тактические, технические и эксплуатационные. В качестве исходных данных при расчете РЛ берутся их тактические показатели. К тактическим характеристикам, определяющим возможности использования РЛС как источника информации, относятся: назначение, зона обнаружения, время обзора зоны; число измеряемых координат и точность их определения; разрешающая способность; помехоустойчивость; объем и количество получаемой дополнительной информации; способ отображения информации.
Зоной обнаружения РЛС (рис.1.1) называют пространство, в пределах которого РЛС обнаруживает цели с определенными отражающими свойствами, с заданными вероятностями правильного обнаружения и ложной тревоги. Зону обнаружения представляют в виде сечений в вертикальной плоскости (Д в) и в горизонтальной (Д г):
 ;
;  ,
,
где  - нормированная ДН антенны;
- нормированная ДН антенны;  - азимутальный угол;
- азимутальный угол;  - угол места; Н – высота расположения цели;
- угол места; Н – высота расположения цели;  - максимальная дальность действия РЛС.
- максимальная дальность действия РЛС.
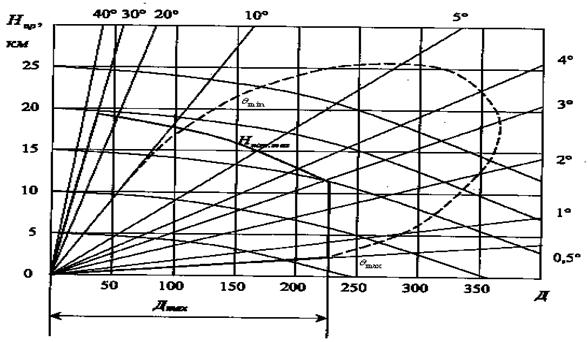
Рис. 1.1. Зона обнаружения РЛС
В качестве примера приведено вертикальное сечение зоны обнаружения РЛС кругового обзора, которая строится в координатах «наклонная дальность» - «приведенная высота».
Период обзора пространства зависит от многих факторов, в том числе от ширины диаграммы направленности антенны (ДНА) РЛС  , сектора обзора
, сектора обзора  , числа импульсов n, отраженных от цели за время одного обзора, и максимальной дальности действия. Для РЛС кругового обзора он определяется следующим выражением:
, числа импульсов n, отраженных от цели за время одного обзора, и максимальной дальности действия. Для РЛС кругового обзора он определяется следующим выражением:
 , (1.1)
, (1.1)
где  - время, необходимое для того, чтобы антенна повернулась на угол, равный ширине ДН антенны;
- время, необходимое для того, чтобы антенна повернулась на угол, равный ширине ДН антенны;  - период повторения импульсов; n – число импульсов в пачке отраженных сигналов.
- период повторения импульсов; n – число импульсов в пачке отраженных сигналов.
Разрешающая способность РЛС по какому-либо параметру – минимальная разность этих параметров между двумя ВС с одинаковыми остальными координатами и отражающими свойствами, при которых возможно раздельное наблюдение каждого ВС.
Различают разрешающую способность по дальности и угловым координатам. Разрешающая способность по дальности определяется следующим выражением:
 , (1.2)
, (1.2)
где  -масштаб развертки индикатора кругового обзора (ИКО);
-масштаб развертки индикатора кругового обзора (ИКО);  - диаметр светового пятна отметки;
- диаметр светового пятна отметки;  - радиус индикатора кругового обзора (ИКО).
- радиус индикатора кругового обзора (ИКО).
Разрешающая способность РЛС по угловым координатам определяется следующим выражением:
 , (1.3)
, (1.3)
где  - ширина луча по уровню половинной мощности;
- ширина луча по уровню половинной мощности;
Др – расстояние в км от центра экрана до отметки цели.
Помехоустойчивость – это свойство РЛС сохранять тактические показатели при воздействии помех.
Объем и качество получаемой информации – это характеристики, относящиеся к ВРЛ. Объем информации характеризуют числом бит, приходящемся на одно сообщение, а качество – вероятностью ошибки приема одного бита или всего сообщения в целом.
Эксплуатационные характеристики включают в себя показатели надежности, контроле- и ремонтопригодности.
Под надежностью РЛ понимают свойство выполнять заданные функции, сохраняя во времени значения установленных тактических показателей в заданных пределах, соответствующих заданным режимам и условиями использования, обслуживания, хранения и транспортирования. Показателями надежности, определяющими качество функционирования РЛС, являются коэффициенты готовности, оперативной готовности и технического использования. Трудоемкость технического обслуживания и ремонта характеризуют средняя и удельная суммарные трудоемкости, а стоимость – средняя и удельная суммарные стоимости. Показателями ремонтопригодности являются вероятность восстановления РЛС в данное время и среднее время восстановления. Из показателей долговечности в ГА используется назначенный ресурс.
Характеристики РЛС должны сохраняться в заданных климатических условиях, к которым относятся: рабочий диапазон температур и влажности.
1.2. Технические характеристики радиолокационных систем ГА
Технические характеристики РЛС обеспечивают получение заданных тактических и эксплуатационных характеристик. Основными техническими характеристиками являются: длина волны излучаемых колебаний; форма излучаемого сигнала; длительность и частота повторения импульсов; средняя и импульсная мощность излучения; форма и ширина ДН антенны в горизонтальной и вертикальной плоскости; метод обзора зоны; эффективная площадь и коэффициент усиления антенны; чувствительность приёмного устройства; ширина полосы пропускания приёмника; коэффициент шума приёмника; габаритные размеры и масса РЛС.
Методика выбора и расчет технических характеристик приведены в методических указаниях по выполнению курсового проекта.
1.3. Нормы ИКАО на тактико-технические характеристики РЛС
1.3.1. Нормы ИКАО для аэродромных РЛ
Аэродромный радиолокатор SRE, входящий вместе с посадочным радиолокатором PAR в радиолокационную систему управления посадкой по командам с земли GCA, должен удовлетворять следующим нормам, рекомендованным ИКАО.
Аэродромный РЛ должен обнаруживать ВС с ЭПР не менее 15 м2, находящиеся в зоне прямой видимости (из точки расположения антенны) в пределах пространства, охватывающего вращением на 3600 вокруг вертикальной оси плоской фигуры рис. 1.2 (на рис.1.2 сплошная линия). В то же время ИКАО рекомендует увеличить зону обнаружения до размеров, указанных на этом рисунке штриховой линией.
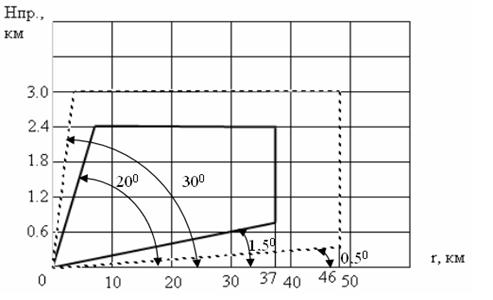
Рис. 1.2. Зона обзора аэродромной РЛС
Погрешность в определении положения отметки цели по азимуту не должна быть больше ±20.
Погрешность индикации дальности не должна превышать 3% от действительного расстояния до цели или 150 м в зависимости от того, какая из этих величин больше.
Разрешающая способность по дальности должна быть не хуже 1% расстояния от антенны РЛ до цели, либо 230 м в зависимости от того, какая из этих величин больше.
Разрешающая способность станции по азимуту должна быть не хуже 40.
Информация о дальности и азимуте любого ВС, находящегося в пределах зоны обнаружения радиолокатора, должна возобновляться не реже, чем каждые 4 с.
1.3.2. Нормы ИКАО для посадочных РЛ
ИКАО установила нормы и рекомендации относительно выбора тактических параметров посадочных радиолокаторов (PAR – precision approach radar). Предполагается, что эти РЛ могут вместе с аэродромными радиолокаторами SRE (surveilance radar equipment) входить в состав системы управления посадкой по командам с земли GCA (ground command approach) или использоваться автономно.
В соответствии с нормами посадочный РЛ должен быть способен обнаруживать и указывать местоположение ВС с эффективной поверхностью рассеяния (ЭПР) 15  или более, которое находится в пространстве, ограниченном сектором по азимуту в 200 и по углу места в 70 на расстоянии не менее 17 км от антенны радиолокатора.
или более, которое находится в пространстве, ограниченном сектором по азимуту в 200 и по углу места в 70 на расстоянии не менее 17 км от антенны радиолокатора.
Допустимая погрешность в определении отклонения ВС от линии курса должна быть либо 0,6% расстояния от антенны посадочного РЛ до цели плюс 10% отклонения его от линии курса, либо 9 м в зависимости от того, какая из этих величин больше.
По углу места максимально допустимая погрешность в определении отклонения ВС от заданной траектории посадки в вертикальной плоскости не должна превосходить 0,4% расстояния от антенны РЛ до цели плюс 10% фактического линейного отклонения по вертикали от траектории посадки либо 6 м в зависимости от того, какая из этих величин больше.
Максимальная погрешность в определении дальности не должна превышать 30 м плюс 3% расстояния от расчетной точки приземления до цели.
Согласно нормам ИКАО разрешающая способность по азимуту должна быть не хуже 1,20, по углу места – 0,60 и по дальности – 120 м.
1.3.3. Нормы ИКАО для ВРЛ
ИКАО установила нормы и выработала ряд рекомендаций на тактические и некоторые технические характеристики вторичных радиолокаторов SSR (secondary suveillance radar).
Для радиолокационных систем с активным ответом устанавливается зона обнаружения, определяемая следующими параметрами: максимальная дальность действия 370 км, минимальная дальность действия 1,85 км, максимальный угол места 450, минимальный угол места 0,50, максимальная высота 30480 м. Зона должна быть обеспечена при любых метеорологических условиях и на всех азимутах.
Запросные сигналы должны посылаться на частотах (1030±0,2) МГц, ответные – на частоте (1090±3) МГц. Поляризация запросных и ответных сигналов должна быть вертикальной.
Сигнал запроса должен состоять из двух импульсов, обозначаемых Р1 и Р3 (рис. 1.3). Дополнительный импульс Р2, предназначенный для подавления сигналов, приходящих с направления боковых лепестков, передается через 2 мкс после Р1.
Рис. 1.3. Структура сигнала запроса при трехимпульсном подавлении
Интервал между импульсами Р1 и Р3 определяет код запроса. Могут использоваться четыре запросных кода: A, B, C и D с кодовыми интервалами 8, 17, 21 и 25 мкс соответственно.
Коды A и B предназначены для опознавания ВС. В ответ на запросы этими кодами бортовой ответчик должен сообщить на землю рейсовый номер ВС.
Запросный код С используется для получения данных о высоте, на которой находится ВС. При запросе этим кодом ответчик передает на землю показания барометрического высотомера, отрегулированного на стандартное давление 760 мм рт. ст. (1,013×105 Па).
Код D зарезервирован для использования в перспективных системах УВД.
Нормы ИКАО предполагают применение двухимпульсных и трехимпульсных систем подавления сигналов боковых лепестков по запросу. При двухимпульсной системе подавления, когда используется сравнение амплитуд импульсов Р1 и Р3, амплитуда Р1 в антенне приемника бортового ответчика должна превышать амплитуду Р3 по крайне мере на 11 дБ для всех азимутальных углов, кроме тех, которые охватываются основным лепестком антенны запросчика.
Для трехимпульсной системы подавления, когда используется сравнение амплитуд импульсов Р1 и Р2, амплитуда импульса Р2 в антенне приемника бортового ответчика должна быть равна или больше амплитуды импульса Р1 для всех направлений, кроме направления главного лепестка запросной антенны. Амплитуда этого же импульса должна иметь уровень на 9 дБ ниже амплитуды импульса Р1 в пределах сектора запроса.
Максимальная частота запросов не должна быть больше 450 Гц.
Для предотвращения ненужных срабатываний ответчиков, находящихся вне установленной зоны управления, эффективная излучающая пиковая мощность импульсов запроса Р1 и Р3 (произведение импульсной мощности на коэффициент усиления антенны) не должна превышать 52,5 дБ по отношению к 1 Вт (180 кВт).
Нормы ИКАО устанавливают требования на структуру ответных кодов, объем и характер передаваемой информации.
Информацию, получаемую с помощью вторичных РЛС, можно условно разделить на две основные части: координатную и дополнительную.
Ответный сигнал состоит из двух крайних опорных импульсов F1 и F2 - координатных, временной интервал между которыми составляет (20,3±0,1) мкс (рис. 1.4).
Рис. 1.4. Структура ответного кода
Между ними расположены 13 кодовых позиций, предназначенных для формирования информационных кодов. Все информационные позиции разбиты на группы A, B, C и D. Каждая из этих групп содержит по три позиции A1, A2, A4; B1, B2, B4 и т.д. При этом группа А передает тысячи, В – сотни, С – десятки, D – единицы номера рейса. Импульсы передаются только для символа “1” младшими разрядами вперед, при нулевом символе импульс отсутствует.
Максимальное число, которое может быть записано таким образом, будет 7777. Поскольку в каждой декаде для передачи десятичных чисел используется только три разряда, передача десятичных цифр 8 и 9 невозможна. Передача данных о высоте производится кодом Гиллхэма.
1.4. Методы защиты приемного тракта РЛС от помех
Достоверность информации о ВС, получаемой в РЛС, можно повысить путем применения методов помехозащиты и обработки результатов измерений.
Методы защиты от помех зависят от вида этих помех. Различают помехи двух видов: шумы приемного устройства РЛС и помехи, создаваемые внешними источниками.
Внешние помехи делятся на активные и пассивные. К активным относятся сигналы, излучаемые соседними радиотехническими средствами, атмосферные и индустриальные помехи, шумы космического пространства. Пассивные помехи – это сигналы, отраженные от подстилающей поверхности, местных предметов, метеообразований и спорадические помехи.
Защита от активных помех может быть организована с помощью следующих устройств: селекции сигналов, защиты приемников РЛС от перегрузок и компенсации радиопомех. Широкое распространение в современных РЛС получают устройства с адаптацией, которые изменяют параметры сигнала или характеристики РЛС таким образом, чтобы в условиях помех данного типа в максимальной степени снижался уровень ложных тревог РЛС.
1.4.1. Селекция сигналов
Различают первичную, вторичную и функциональную селекцию. Существуют следующие виды первичной селекции: пространственная, поляризационная, частотно-фазовая, временная, амплитудная, структурная.
Пространственная селекция осуществляется антенной системой РЛС. Чем уже ДНА и меньше уровень боковых лепестков, тем сильнее подавление мешающих сигналов, выше уровень пространственной селекции.
Для борьбы с пассивными помехами от метеообразований используют поляризационную селекцию. Для реализации метода подавления, основанного на поляризационной селекции, современные РЛС излучают колебания с круговой поляризацией. Капли дождя сохраняют круговую поляризацию, изменяя лишь направление вращения вектора её электрического поля на противоположное. Такой сигнал является ортогональным по отношению к излученному и существенно подавляется в антенно-волноводном тракте. Применение круговой поляризации в РЛС увеличивает отношение сигнал/помеха для слабого дождя на 25...30дБ.
Первичная частотно-фазовая селекция основывается на различии частотно-фазовых характеристик принимаемых сигналов и помех. При этом используются системы частотной и фазовой автоподстройки, позволяющие сузить полосу пропускания приемника, методы оптимальной фильтрации, осуществляющие селекцию на основе различия спектров сигнала и помехи.
К частотной селекции относятся методы, основанные на изменении несущей частоты и частоты следования зондирующих импульсов. Использование зондирования на двух частотах улучшает характеристики обнаружения и уменьшает ошибки измерения угловых координат благодаря усреднению значений ЭПР цели на разных несущих частотах. Изменение периода следования зондирующих импульсов служит в основном для борьбы со «слепыми» скоростями в когерентно-импульсных РЛС.
Устройства временной селекции, осуществляющие сравнение импульсов по длительности, по частоте повторения и по времени их появления позволяют выделить сигналы на фоне импульсных помех.
Устройства с амплитудной селекцией предназначены для борьбы с хаотическими импульсными помехами. Амплитудную селекцию осуществляют методом накопления с помощью некогерентного (последетекторного) накопителя или с помощью систем ограничителей, селектирующих сигнал по его интенсивности на входе приемника.
Структурная селекция основывается на особенностях модуляции сигналов РЛС. Примером её реализации может служить метод сжатия в приемном устройстве импульсных сигналов с частотной модуляцией.
Вторичная селекция связана с контролем сопутствующих сигналов РЛС. Различают частотную, фазовую, временную, амплитудную и структурную вторичные селекции.
Функциональная селекция осуществляется на этапе третичной обработки информации в видеотракте РЛС.
1.4.2. Защита приемников от перегрузок
На входе приемника РЛС присутствуют сигналы и помехи с широким динамическим диапазоном (ШДД) изменения амплитуд порядка 100дБ. В то же время для нормальной работы линейной части приемника динамический диапазон не должен превышать 40дБ. Для согласования ШДД амплитуд входных колебаний с рабочим динамическим диапазоном реальных устройств производят сжатие динамического диапазона обрабатываемых колебаний.
Для защиты от перегрузок приемно-усилительных трактов и индикаторов РЛС используют три метода: регулировку усиления, формирование нелинейной амплитудной характеристикой (АХ) усилительного тракта, применение антенн с ДНА близкой к cosec²φ.
Для борьбы с перегрузкой применяются следующие разновидности систем АРУ: временная (ВАРУ), быстродействующая автоматическая (БАРУ), мгновенная (МАРУ).
Система ВАРУ служит для защиты приемника от перегрузки отражениями от местных предметов и выравнивания яркости отметок от целей, находящихся на различном удалении от РЛС. Кроме того, ВАРУ является одним из основных средств борьбы с помехами типа «ангел», представляющих собой эхо – сигналы от птиц, перемещающихся со скоростью ветра, а также сигналы, обусловленные появлением зон аномального распространения электромагнитных колебаний.
Для стабилизации вероятности ложных тревог осуществляют регулировку усиления в зависимости от уровня шума (ШАРУ).
В РЛС третьего и четвертого поколения применяют устройства сжатия амплитуд входных сигналов, в основе которых лежит обработка отдельных амплитудно-дальностных ячеек, на которые разделена рабочая зона РЛС. Ячейки дальности и азимута, в которых присутствует помеховый сигнал, отраженный от местных предметов или метеообразований, исключается при дальнейшей обработке радиолокационной информации. Так, ослабляя сигнал, поступающий по основному лучу в комбинации с сигналом дополнительного приподнятого луча в РЛС с двулучевой ДНА, можно менять угол приема отраженного сигнала, исключая отражения от местных предметов. Такой способ адаптивного подавления помех позволяет уменьшить уровень мешающих сигналов на 25...30дБ.
1.4.3. Компенсация радиопомех
В импульсных РЛС применяются два основных метода компенсации помех: с помощью вспомогательных приемников и череспериодная компенсация в системе селекции движущихся целей.
Первый метод используется для компенсации помех, действующих по боковым лепесткам ДНА. По основному каналу (рис. 1.5) поступает смесь полезного сигнала с помехой. Вспомогательный канал служит для приема помехи. В результате последующей операции вычитания помехи из выходных колебаний основного канала на выход компенсатора проходят сигналы, отраженные от цели.
Uc+Uп
| |||||||
 |
| ||||||
| |||||||
|
 |
 |
| |||
 | |||
|
|


 Uп
Uп




|


|



|


|
|
|
 |
Рис.1.5. Структурная схема корреляционного автокомпенсатора
Основным средством борьбы с помехами от подстилающей поверхности и местных предметов является система селекции движущихся целей. В основе работы устройств СДЦ лежит эффект смещения несущей частоты сигнала, отраженного от движущегося объекта (эффект Доплера). При этом на практике используется метод фиксации изменения череспериодного вычитания импульсов с неизменной фазой. Сравнение фазовых соотношений зондирующего и отраженного сигналов осуществляется, как правило, на промежуточной частоте. При этом структурная схема системы СДЦ включает фазовый детектор и устройство череспериодной компенсации (ЧПК).
В радиолокаторах, используемых в АС УВД, опорное колебание фазового детектора (Uоп) и зондирующий высокочастотный сигнал обладают истинной внутренней когерентностью, которая позволяет получить высокую степень компенсации пассивных помех.
Работа передающего (ПРД) и приемного (ПРМ) трактов в истинно когерентных радиолокаторах (рис. 1.6) обеспечивается едиными высокостабильными генераторами - задающим (ЗГ) и опорным (ОГ).\
 | |||
| |||
Uоп

Рис. 1.6. Упрощенная схема СДЦ в структуре РЛС
Радиолокаторы, в которых фаза опорного колебания синхронизируется принимаемым сигналом, относятся к РЛС с внешней когерентностью. РЛС, в которой фаза опорного колебания синхронизируется начальной фазой высокочастотного заполнения зондирующего импульса, в каждом периоде повторения относятся к классу псевдокогерентных РЛС. Как правило, качественные показатели систем СДЦ в подобных РЛС ниже, чем у истинно
когерентных РЛС.
Наиболее совершенными являются подавители на дискретных цифровых фильтрах. Если последовательность видеоимпульсов пропустить через устройство череспериодного вычитания, т.е. произвести вычитание каждого последующего импульса из предыдущего, то сигналы, отраженные от неподвижных целей, идентичные по структуре, взаимно скомпенсируются и не поступят на дальнейшую обработку. Система СДЦ (схема ЧПК) представляет собой режекторный- гребенчатый фильтр, частотная характеристика которого (рис. 1.7) имеет провалы в окрестностях частот, кратных частоте повторения импульсов.
Спектральные линии радиоимпульсов, отраженных от неподвижных предметов, совпадают с положением нулей АЧХ фильтра, и такой сигнал подавляется. Так как частотные интервалы между спектральными составляющими радиоимпульсов, отражаемых от движущихся объектов, имеют
доплеровское смещение частоты 2Vр/λ, где Vр – радиальная скорость движения цели, то такой сигнал ЧПК не подавляется.
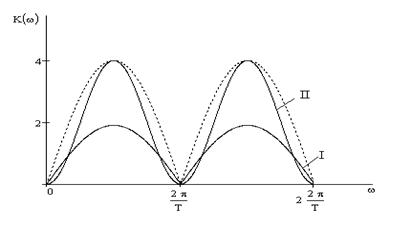
Рис. 1.7. Амплитудно-частотная характеристика системы ЧПК
При определенной радиальной скорости цели Vр=Vсл фаза высокочастотного отраженного сигнала за время Т может измениться на 360°.
В этом случае сигнал будет подавлен аналогично сигналу от неподвижного объекта. Скорости Vсл носят название «слепых» скоростей и определяются как
Vсл=nλ/ Тп,
где n –целое число.
Среди известных методов уменьшения числа «слепых» скоростей в пределах рабочего диапазона радиальных скоростей цели наибольшее распространение получил способ вобуляции частоты, то есть изменения периода повторения зондирующих импульсов. Далее рассмотрим принцип построения радиолокационных станций УВД, находящихся в настоящее время на эксплуатации.
2.1. Первичные трассовые РЛС
 Главное требование, которое предъявляется к РЛС и РЛК - обеспечение стабильного уровня ложных тревог на выходе РЛС. Это требование выполняется благодаря адаптивным свойствам этих РЛС, в которых осуществляется анализ помеховой обстановки и автоматическое управление режимом работы РЛС.
Главное требование, которое предъявляется к РЛС и РЛК - обеспечение стабильного уровня ложных тревог на выходе РЛС. Это требование выполняется благодаря адаптивным свойствам этих РЛС, в которых осуществляется анализ помеховой обстановки и автоматическое управление режимом работы РЛС.
Особенностями построения трассовых РЛС являются:
- применение цифровой системы СДЦ (коэффициент подавления помех от местных предметов до 40…45 дБ и коэффициент подпомеховой видимости до 28…32 дБ);
- применение переменного периода повторения зондирующего сигнала (вобуляция частоты) для борьбы с помехами от целей, удалённых от РЛС на расстояние, превышающее максимальную дальность действия РЛС, и для борьбы со «слепыми» скоростями;
- обеспечение линейной АХ приёмного тракта до входа системы СДЦ с динамическим диапазоном по входному сигналу до 90…110 дБ и динамическим диапазоном системы СДЦ до 40 дБ;
- применение автоматического управления положением нижней кромки зоны обзора РЛС в вертикальной плоскости благодаря использованию двухлучевой ДНА и формированию взвешенной суммы сигналов верхнего и нижнего лучей.
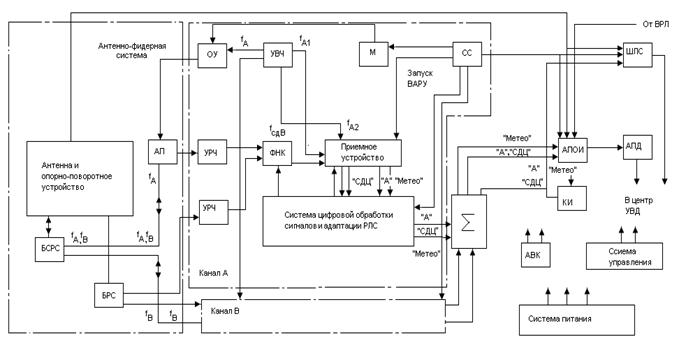
Существует несколько вариантов построения структурной схемы первичной трассовой РЛС. В качестве примеров схемных решений выбраны РЛС «Скала-М», «Скала-МПА», «Скала-МПР», Лира 1. Главными особенностями структурной схемы рис. 2.1 первичной импульсной РЛС кругового обзора являются: применение двух приемопередающих каналов с разносом частот; использование двухлучевой ДНА в вертикальной плоскости; применение истинно-когерентного метода СДЦ.
Первая особенность РЛС связана с применением одного из методов повышения её энергетического потенциала – метода разноса частот. Два передатчика А и В работают одновременно на общую антенну в режиме импульсной модуляции с различными несущими частотами fA и fB зондирующих импульсов, временной сдвиг между которыми составляет обычно 4…6 мкс, разнос по частоте 40…60 МГц.

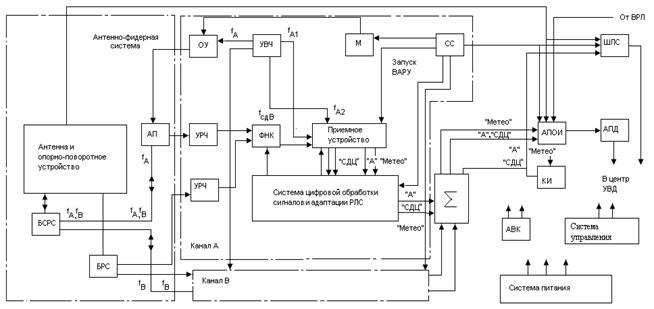
Отраженные от цели сигналы с разными частотами разделяются с помощью СВЧ фильтров и усиливаются двумя приемными каналами А и В, настроенными на соответствующие частоты. После детектирования видеосигналы каналов А и В объединяются и далее обрабатываются совместно.
Преимуществами двухчастотной схемы построения РЛС перед одночастотной РЛС являются: увеличение суммарной мощности излучения РЛС при наличии ограничений мощности отдельного передатчика; увеличении дальности обнаружения и точности измерения координат; увеличения надежности работы РЛС и её помехозащищенности по отношению к помехам искусственного и естественного происхождения.
 Увеличение дальности обнаружения и точности измерения координат объясняется тем, что диаграмма переотражений сложных целей на разных частотах имеет провалы на различных углах визирования. Поэтому сумма выходных напряжений в двухканальной РЛС имеет значительно меньше флуктуаций амплитуды, чем в случае приема сигналов от целей на одной частоте. В некоторых типах РЛС зона обнаружения в вертикальной плоскости (рис. 2.2) формируется с учетом применения локальной обработки принимаемых сигналов.
Увеличение дальности обнаружения и точности измерения координат объясняется тем, что диаграмма переотражений сложных целей на разных частотах имеет провалы на различных углах визирования. Поэтому сумма выходных напряжений в двухканальной РЛС имеет значительно меньше флуктуаций амплитуды, чем в случае приема сигналов от целей на одной частоте. В некоторых типах РЛС зона обнаружения в вертикальной плоскости (рис. 2.2) формируется с учетом применения локальной обработки принимаемых сигналов.
Рис. 2.2. Принцип формирования зоны обнаружения трассовой РЛС
в вертикальной плоскости:
K1 – верхняя граница использования сигналов дополнительного луча 2, обработанных в системе СДЦ (Доп. СДЦ); K2 – верхняя граница использования сигналов основного луча 1, обработанных с системе СДЦ (Осн. СДЦ); A – верхняя граница использования сигналов дополнительного луча 2, не обработанных в системе СДЦ (Доп. А); Dmax – максимальная дальность действия РЛС, являющаяся верхней границей использования необработанных в системе СДЦ сигналов основного луча 1 (Осн. А)
Вся зона обнаружения по дальности трассовой РЛС разбивается на четыре участка (I…IV). Границы участков задаются по программе в зависимости от конкретных условий размещения РЛС. Данный принцип формирования зоны обнаружения позволяет: получить максимальное подавление помех от местных предметов на начальном участке дальности 1; свести к минимуму область воздушного пространства, где используется сумма сигналов Осн. СДЦ и Доп. СДЦ, и тем самым уменьшить влияние скоростной характеристики системы СДЦ (участок II). При наличии помех типа «ангел» целесообразно использовать сигнал дополнительного луча (участок III при K2 <А). После предварительного анализа помеховой обстановки и задания границ K1, K2 и А между 4 участками дальности зоны обнаружения, структура РЛС приобретает фиксированную конфигурацию и не меняется в процессе работы РЛС.
В других современных РЛС применяется более гибкий подход к формированию зоны обнаружения, реализующий идею динамической адаптации РЛС к помеховой обстановке. При этом вся зона обнаружения по дальности разбивается на два равных участка. Участок I,. для которого характерно наибольшее влияние помех от местных предметов, разбивается на элементарные зоны по азимуту 5,6º (64 сектора), а по дальности - на 16 участков. В результате вся зона обзора в горизонтальной плоскости в пределах первой половины максимальной дальности действия РЛС получается разбитой на 16 · 64 = 1024 ячейки. В течение рабочего цикла, равного трем периодам обзора, осуществляется анализ помеховой обстановки и в специальном запоминающем устройстве РЛС формируется текущая карта помех, содержащая информацию об уровне помех в каждой из 1024 ячеек. На основе этой информации производится выбор весовых коэффициентов для формирования взвешенной суммы сигналов, принятых по основному и дополнительному лучам ДНА, для каждой из этих ячеек в отдельности.
В результате зона обнаружения РЛС в вертикальной плоскости приобретает сложную конфигурацию: нижняя кромка зоны обнаружения в разных ячейках имеет различный наклон (-0,5; 0,1; 0,5 или 1º). На второй половине дальности (участок II) используется только сигнал, принимаемый по основному лучу.
Отраженные от цели радиоимпульсы с несущей частотой fA, принимаемые по основному лучу ДНА, через БСРС, АП и малошумящий УРЧ поступают на один из входов формирователя нижней кромки ФНК. Радиоимпульсы с той же частотой fA, принимаемые по дополнительному лучу ДНА, через блок разделения БРС и УРЧ поступают на второй вход ФНК. На выходе ФНК в результате весового суммирования сигналов основного и дополнительного лучей образуют суммарный сигнал, который поступает на вход приемника РЛС. В приемном устройстве осуществляется преобразование частоты, усиление и частотная селекция сигнала и далее его детектирование. Видеосигнал А с выхода АД поступает в систему цифровой обработки, минуя СДЦ, а видеосигнал СДЦ с выхода ФД поступает на вход СДЦ, входящий в состав системы цифровой обработки сигналов.
Для обеспечения постоянной разности частот fA и fB используется специальный генератор сдвига частот.
Цифровая часть РЛС начинается со входа системы цифровой обработки сигналов и адаптации РЛС. Главными функциями этой системы являются: очистка принимаемого сигнала от различного рода помех; анализ текущей помеховой обстановки и автоматическое управление режимами работы РЛС (функция адаптации). Входные сигналы «А», «СДЦ» и «Метео», поступающие с выхода приемника, преобразуются в цифровую форму.
Первая функция системы обработки реализуется с помощью следующих цифровых устройств: устройства ЧПК системы СДЦ; видеокоррелятора для подавления несинхронных помех и отраженных сигналов предыдущего периода зондирования; устройства Лог – МПВ – Антилог, служащего для выделения полезного сигнала на фоне помех от протяженных по дальности и азимуту целей (метеообразования); устройства выделения сигналов для получения информации о контурах метеообразований.
При выполнении второй функции системы обработки используются следующие устройства: устройство секторизации для разделения зоны обзора на ячейки и распределения памяти системы; картограф помех для формирования динамической карты помех; анализаторы параметров принимаемых сигналов; управляющие устройства для формирования сигналов управления режимами работы и параметрами РЛС. Устройство, обозначенное на рис. 2.1 как Σ, осуществляет объединение сигналов двух частотных каналов РЛС.
Рассмотрим работу одного канала РЛС (рис. 2.1). Система синхронизации СС вырабатывает импульсы запуска, которые поступают на вход модулятора М передающего устройства. Модулятор М под воздействием импульсов запуска вырабатывает мощные модулирующие импульсы, поступающие на оконечный усилитель ОУ передатчика РЛС. Генератор радиочастот ГРЧ генерирует непрерывные гармонические колебания с частотой fA, которые усиливаются в ОУ и модулируются по амплитуде М. В результате на выходе ОУ формируется последовательность когерентных импульсов с несущей частотой fA и прямоугольной огибающей. Эти радиоимпульсы через антенный переключатель АП и блок сложения мощностей и разделения сигналов (БСРС) поступают в антенное устройство РЛС и излучаются антенной.
С выхода этого устройства в АПОИ передаются два объединенных сигнала «А» (или «СДЦ») и «метео». В РЛС, не содержащих собственной АПОИ, эти сигналы преобразуются с помощью ЦАП в аналоговую форму и передаются на входы АПОИ, сопрягаемой с РЛС, на контрольный индикатор (КИ) и широкополосную линию связи ШЛС.
Аппаратура первичной обработки информации (АПОИ) обычно представляет собой универсальную аппаратуру, сопрягаемую с различными типами РЛС. В этой аппаратуре осуществляются операции обнаружения сигналов воздушных целей и измерения их координат, а также объединение информации первичной РЛС с информацией вторичного радиолокатора. С выхода АПОИ радиолокационная информация в цифровом виде транслируется в центр УВД с помощью узкополосной аппаратуры передачи данных АПД.
Важной особенностью современных трассовых РЛС является использование системы автоматического встроенного контроля (АВК).
Тактико-технические характеристики трассовой РЛС
Дальность действия при нулевых углах закрытия, км, по самолету типа:
- Ту-144 при Нпол=13…20 км…………………………………………400
- Ту-154, Ил-62 при Нпол=10 км………………………………………340
- Ил-18 при Нпол=6 км…………………………………………………250
Минимальная дальность действия, км……………………………………..12
Зона обзора в вертикальной плоскости, градус:
- верхний угол места, не менее………………………………………45
- нижний угол места, не более………………………………………0,5
Вероятность правильного обнаружения при вероятности ложных
тревог не более 10-6………………………………………………………...0,8
Средняя квадратическая погрешность на выходе АПОИ:
- по дальности, м, не более …………………………………………300
- по азимуту,с, не более ……………………………………………….8
Разрешающая способность:
- на выходе АПОИ:
- по дальности, м, не более ……………………………………….…650
- по азимуту,градус, не более ……………………………………..….2
Коэффициент подпомеховой видимости на фоне помех от местных предметов при вращающейся антенне, дБ:
- при двухкратном череспериодном вычитании ……………………..18
- при трехкратном череспериодном вычитании …………………….24
Коэффициент подавления помех от местных предметов, дБ, не менее …42
Коэффициент подавления помех от метеообразований, дБ……………..18
Наличие встроенного вторичного радиолокационного канала ……..Есть
Темп обновления и выдачи информации, с …………..…………….10 и 20
Число направлений передачи информации в цифровом виде
по стандартным телефонным каналам………………………………………3
Возможность выдачи информации:
- в аналоговом виде по широкополосной линии (кабелю) на расстояние до 5 км. …………………..…………………………………..Есть
- о границах метеообразований (в двух градациях)……….…..Есть
Полное время включения, мин, не более ……………………...…………..12
Среднее время наработки на отказ, ч ………………………………..….1100
Среднее время восстановления, мин …………………………………...….25
Потребляемая мощность по первичной сети электропитания 380 В, 50 Гц, кВт, не более …………………………………………………………….…150
Рабочая длина волны, см …………………………………………………...23
Разнос каналов А и В по частоте, МГц………………………………….....56
Габаритные размеры отражателя антенны, м ……………………….10,5×15
Ширина ДНА в горизонтальной плоскости по уровню 3 дБ, градус
- нижнего луча и верхнего луча………………………………….1,1±0,1
Коэффициент усиления антенны, дБ:
- по нижнему лучу и верхнему……………………………………….36
Уровень боковых лепестков антенны, дБ:
- по нижнему лучу и верхнему………………………………………-20
Потери в радиопрозрачном укрытии антенны, дБ…………………..……1,7
Возможность управления поляризацией от линейной до круговой (плавно):
- в канале нижнего луча …………………………………..………Есть
- в канале верхнего луча…………………………Нет (только круговая)
Длительность зондирующего импульса, мкс ………………………..3,3±0,3
Средняя частота повторения импульсов, Гц…………..…………………333
Изменение периода повторения импульсов………………….…………Есть
Импульсная мощность передатчика, МВт, не менее………….………….3,6
Коэффициент шума приемника, дБ, не более…………………..…………4,8
Промежуточная частота, МГц ………………………………………...……35
Ширина полосы пропускания приемника на промежуточной
частоте, МГц……………………………………………………………...6±0,1
Динамический диапазон системы цифровой обработки сигналов и адаптации, дБ:
- по амплитудному каналу, не менее ……….………………….……18
- по каналу СДЦ, не менее……………………………………..………42
Характеристики квадратурной цифровой системы СДЦ:
- кратность череспериодного вычитания …………………….……2 и 3
- коэффициент подавления помех, дБ, не менее ……………………42
- дальность действия, км ……………………………………………390
Остановимся более подробно на особенностях построения отдельных узлов первичной трассовой РЛС.
2.1.1. Антенно-фидерная система трассовой РЛС
Антенно-фидерная система (АФС) первичного радиолокатора предназначена для передачи высокочастотной энергии от двух передающих устройств к вращающейся антенне излучения зондирующих сигналов в соответствии с требуемой зоной обнаружения и передачи принятых радиолокационных сигналов от антенны к соответствующим приёмным устройствам РЛС.
В состав АФС входят антенное устройство, волноводно-коаксиальный тракт опорно-поворотного устройства (ОПУ) и основной волноводный тракт.
Антенна представляет собой зеркальную систему с отражателем двойной кривизны и рупорным облучателем. ДНА по основному и дополнительному лучам имеет форму, близкую к форме типа cosec². В азимутальной плоскости ДНА является узконаправленной, а её ширина по одному лучу составляет (1,1±0,1)°.
Для формирования двухлучевой ДНА в антенном устройстве и волноводно-коаксиальном тракте применяются идентичные рупорные облучатели основного (ООК) и дополнительного (ОДК) каналов(146´306´660 мм). В тракте ОК используется устройство управления поляризацией (УУП), предназначенное для ослабления сигналов, отражённых от метеообразований, и обеспечивает оперативную установку любого вида поляризации. Поляризационное устройство ПУ дополнительного канала позволяет установить только одну из круговых поляризаций – левую или правую.
Радиопрозрачное укрытие (РПУ) обеспечивает защиту антенны от влияния метеофакторов и позволяет снизить аэродинамическую нагрузку на антенну.
В состав волноводно-коаксиального тракта ОПУ входят вращающиеся сочленения основного канала (ВСОК) и дополнительного канала (ВСДК).
Основной волноводный тракт выполняет следующие функции:
-объединение сигналов двух передатчиков, работающих на различных частотах fА и fВ;
- распределение принимаемых сигналов с несущими частотами fА и fВ, поступающих по основному и дополнительному лучам ДНА, между соответствующими входами приёмного тракта РЛС;
- переключение режимов передачи и приёма сигналов;
- согласование волноводного тракта с передающими устройствами и обеспечение необходимой развязки между двумя частотными каналами РЛС;
- выдачу сигналов в систему контроля параметров РЛС.
Электрическая прочность тракта обеспечивается при импульсной мощности зондирующего сигнала не более 4 МВт.
Высокочастотные колебания с выхода оконечного усилителя передающего устройства поступают в измеритель проходящей мощности (ИПМ). После ИПМ сигнал передатчика проходит последовательно вентиль (В), блок направленных ответвителей (БНО), устройство контроля согласования (УКС), антенный переключатель (АП), устройство ввода затухания (УВЗ), СВЧ фильтр (Ф) и поступает на один из входов блока сложения мощностей и разделения сигналов (БСРС).
Блок направленных ответвителей служит для отвода небольшой части ВЧ энергии и передачи её к контрольно-измерительным приборам для проверки формы огибающей и спектра зондирующего сигнала. Устройство контроля согласования (УКС) осуществляет непрерывный контроль коэффициента стоячей волны. При КСВ³3 это устройство вырабатывает сигнал световой сигнализации «Авария тракта В».
Антенный переключатель выполнен по схеме с газовыми разрядниками. Устройство ввода затухания (УВЗ) позволяет вводить в тракт дополнительное затухание при неработающем передатчике (например, при ремонте и т. д.)
Фильтр (Ф) является заградительным для сигнала с частотой fА<fВ и представляет собой зауженный по широкой стенке волновод со ступенчатыми переходами к нормальному сечению.
Блок сложения и разделения сигналов БСРС служит для сложения мощностей сигналов с частотами fА и fВ при передаче и разделении сигналов с такими частотами при приёме.
В АФС РЛК “Скала – МПР” предусмотрена работа в двухчастотном режиме при взаимно ортогональных поляризациях сигналов, излучаемых на разных частотах fА и fВ. Это обеспечивает дополнительное сглаживание амплитудных флюктуаций суммарного отражённого сигнала и увеличивает максимальную дальность действия РЛС.
2.1.2. Передающее устройство РЛС
В импульсных РЛС применяются передатчики, выполненные по одно- или многокаскадной схеме. В первом случае в качестве оконечного устройства используют магнетрон. Эти передатчики просты, надёжны и имеют большой КПД. Однако невысокая стабильность частоты и фазы генерируемых колебаний не позволяет реализовать систему СДЦ с высокими характеристиками. Каждый передатчик (рис. 2.3) предназначен для генерирования сигналов на одной из несущих частот, а также для формирования вспомогательных колебаний: сигнала гетеродинной частоты и сигнала опорной промежуточной частоты (для работы фазового детектора в системе СДЦ).
Рассмотрим принцип действия одного из каналов передающего устройства РЛС. Задающий генератор генерирует три сигнала: сигнал гетеродинной частоты; сигнал опорной промежуточной частоты (35МГц) и
импульсно-модулированный сигнал промежуточной частоты.
Рис. 2.3. Структурная схема передающего устройства двухчастотной РЛС (один частотный канал):
КГ – кварцевый генератор; КС – ключевая схема; ИВН – источник высокого напряжения; СУУ – смесительно-усилительное устройство; М – модулятор последовательности когерентных радиоимпульсов СВЧ
Сигнал частоты гетеродина поступает на один из входов смесительно–усилительного устройства (СУУ); на второй вход СУУ подаётся импульсно-модулированный сигнал суммарной частоты fс=fг+fпр., который выделяется колебательной системой второго каскада ССУ, усиливается в последующих каскадах СУУ и передаётся в оконечный усилитель передатчика.. Импульсы модуляции длительностью 3,3 мкс для оконечного усилителя формируются импульсным модулятором. На выходе оконечного усилителя формируется последовательность радиоимпульсов длительностью 3,3мкс при средней мощности сигнала 3,6 кВт, которая передаётся в АФС РЛС.
2.1.3. Приемный канал трассовой РЛС
Тракт приема и обработки сигналов можно условно разделить на аналоговую и цифровую части.
Приемная аппаратура двухчастотной импульсной РЛС (рис. 2.4) включает в себя аналоговую часть тракта приема и обработки сигналов и цифровую. Приемники состоит из двух приемных устройств, отличающихся друг от друга несущей частотой принимаемых сигналов. Каждое приемное устройство конструктивно объединяется с соответствующим передающим устройством, составляя таким образом приемопередающий модуль первичной РЛС.
Основными функциями приемного устройства РЛС с применением двухлучевой диаграммы направленности антенны являются: усиление принятых АФС сигналов, преобразование частоты, частотная селекция, детектирование этих сигналов, стабилизация уровня ложных тревог, сжатие динамического диапазона принятых сигналов и формирование сигналов для выделения границ метеообразований.
Приемные устройства выполняются по супергетеродинной схеме с УРЧ, однократным преобразованием частоты и имеют на выходе амплитудный и фазовый детекторы. Таким образом, на выходе приемного устройства формируются два основных вида сигналов: амплитудный – с выхода АД и сигнал промежуточной частоты – с выхода предпоследнего каскада УПЧ.
Приемные устройства РЛС с двухлучевой ДНА можно разделить по способу объединения сигналов, принятых по разным лучам, на группы с объединением на видеочастоте и на высокой частоте. Приемное устройство первой группы содержит два приемных канала, предназначенных для раздельного приема сигналов основного и дополнительного лучей ДНА. Приемные устройства второй группы являются одноканальными и предназначены для приема объединенного сигнала. Однако в этом случае требуется радиочастотное устройство объединения сигналов ФНК, которое включается в приемный тракт между УРЧ и преселектором приемного устройства.
В приемном устройстве первой группы основной (ОК) и дополнительный (ДК) каналы приемного устройства одинаковы. Рассмотрим их принцип действия на примере ОК (рис. 2.4). Принятый по основному лучу ДНА сигнал с выхода АП АФС через направленный ответвитель (НО) и высокочастотное согласующее устройство (СУ) поступает на вход малошумящего УРЧ, усиливается и через фильтр-преселектор поступает на сигнальный вход смесителя (СМ). На гетеродинный вход СМ подаются непрерывные колебания гетеродинной частоты fг от соответствующего частотного канала передающего устройства.
После преобразования частоты в смесителе принятый сигнал усиливается в тракте ПЧ с помощью предварительного и основного усилителей ПЧ (ПУПЧ и УПЧ).
Эти усилители настроены на частоту fпр=35 МГц. С выхода УПЧ сигнал ПЧ поступает в два подканала, имеющие разные амплитудные характеристики.
В подканале АД с линейной АЧХ осуществляется амплитудное детектирование сигнала. Этот подканал используется при формировании зоны обзора РЛС на участке дальности III и IV, т.е. в дальней зоне действия РЛС, и при условии отсутствия помех от мощных метеообразований.
Подканал ЛОГ-МПВ-АнтиЛОГ представляет собой устройство защиты от помех, обусловленных мощными метеообразованиями, влияние которых не компенсируется полностью с помощью поляризационной селекции и системы СДЦ. Этот подканал состоит из УПЧ с логарифмической АХ (ЛОГ), осуществляющего наряду с усилением амплитудное детектирование сигнала, устройство малой постоянной времени (МПВ) и видеоусилителя с антилогарифмической АХ (АнтиЛОГ).
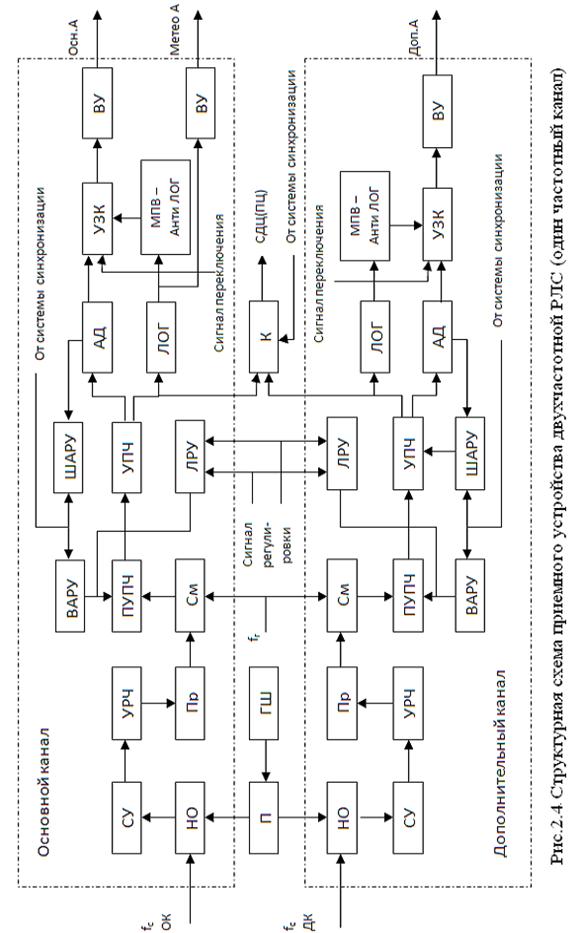
Устройство ЛОГ-МПВ-АнтиЛОГ обеспечивает сжатие динамического диапазона входного сигнала, селекцию по длительности полезного импульсного сигнала, имеющего малую длительность по сравнению с импульсами помехи от метеообразований и частичное восстановление динамического диапазона выделенного полезного сигнала, видеосигналов, полученных от одной цели при двухчастотном режиме работы РЛС. УЗК амплитудный сигнал ОК через видеоусилитель (ВУ) поступает на выход приемного устройства и передается далее в устройство объединения сигналов двух частотных каналов РЛС.
Кроме того, с выхода усилителя ЛОГ через видеоусилитель ВУ на выход приемного устройства выводится видеосигнал “Метео-А”, который передается в устройство выделения контуров мощных метеообразований. Приемный тракт ОК, включающий усилитель ЛОГ и выходной видеоусилитель ВУ, представляет собой приемную часть метеоканалов РЛС.
Выходной сигнал промежуточной частоты СДЦ (ПЧ) приемного устройства формируется с помощью коммутатора К. Для этого сигналы ПЧ с выходов промежуточных каскадов УПЧ ОК и ДК подаются на два входа коммутатора. Последний коммутирует входные сигналы таким образом, что на его выходе присутствует только сигнал ПЧ ДК для ближней зоны действия РЛС, а для дальней зоны – только сигнал ПЧ ОК. Выходной сигнал коммутатора СДЦ (ПЧ) по высокочастотному кабелю передается в блок ФД системы СДЦ, в котором наряду с фазовым дететированием осуществляется объединение сигналов СДЦ (ПЧ) двух частотных каналов РЛС.
Для сжатия динамического диапазона сигналов, отраженных от целей на малых дальностях, применяется ВАРУ, регулирующее напряжение которой подается на каскады ПУПЧ.
С целью стабилизации уровня ложных тревог на выходе РЛС применяется ШАРУ.
Если имеющиеся средства защиты от помех не обеспечивают полного подавления помех от местных предметов и метеообразований, используется локальная регулировка усиления (ЛРУ), осуществляющаяся оператором. Устройствами приемной аппаратуры, обеспечивающими адаптивные свойства РЛС, являются формирователь нижней кромки зоны обнаружения и адаптивный аттенюатор помех (ААП). Каждое из этих устройств состоит из управляющей (цифровой) и исполнительной (аналоговой) частей.
В первичных РЛС применяется цифровая система СДЦ, использующая истинную внутреннюю когерентность принимаемого и опорного сигналов, два квадратурных канала и двукратное или трехкратное череспериодное вычитание.
Основные технические характеристики ЦСДЦ: зона действия по дальности 7…397 км; число элементов по дальности 960; длительность интервала временной дискретизации 2,7 мкс; число разрядов 8; коэффициент подавления помех не менее 40 дБ.
В двухканальной схеме ЧПВ обрабатывается только один из входных сигналов СДЦ (ПЧ1) или СДЦ (ПЧ2). Фазовое детектирование этих сигналов осуществляется независимо с помощью двух схем квадратурного фазового детектирования. Каждая схема состоит из двух фазовых детекторов ФД1, ФД2 и фазовращателя ФВ (рис. 2.5).
 |
Рис. 2.5. Схема квадратурного фазового детектирования
Выбор дальнейшей обработки пары видеосигналов производится с помощью коммутатора К. Эти сигналы подаются на входы двух идентичных каналов схемы ЧПВ, в каждом из которых осуществляются операции двух или трехкратного ЧПВ в цифровой форме. Важным преимуществом ЦСДЦ с двумя квадратурными каналами является практически полное устранение провалов чувствительности системы СДЦ при значениях фазового сдвига, соответствующего слепым скоростям.
Благодаря сдвигу фаз на 900 опорных колебаний, подаваемых на ФД1 и ФД2 в схеме квадратурного фазового детектирования (рис. 2.5), зонам “слепых” фаз в канале ФД1 всегда соответствуют зоны максимальной чувствительности системы СДЦ в канале ФД2, и наоборот. На вход канала ЧПВ поступает аналоговый видеосигнал с выхода фазового детектора.
2.1.4. Устройства адаптации первичной трассовой РЛС
Формирователь нижней кромки является высокочастотным устройством объединения сигналов, принимаемых по двум лучам ДНА, и служит для уменьшения уровня помех от местных предметов на входе приемного устройства (на 20 дБ).

Рис. 2.6. Принцип действия формирователя нижней кромки зоны обзора
в вертикальной плоскости
Работа ФНК (рис. 2.6) основана на использовании цифровой карты помех, которая формируется в системе цифровой обработки сигналов и адаптации РЛС. Карта помех для ФНК составляется в управляющей части этого устройства. Принимаемый сигнал с выхода УПЧ приемного устройства поступает в управляющую часть ФНК для анализа и оценки текущего уровня помех в каждой ячейке отдельно. В анализаторе помех производится детектирование сигнала и сравнение с каждым из четырех установленных пороговых уровней. Результат сравнения для каждой ячейки зоны обнаружения записывается в виде двухразрядного двоичного кода и в соответствующей ячейке запоминающего устройства (ЗУ). На основе информации, записанной в ЗУ, формируется код управляющего сигнала, соответствующий одному из четырех состояний помеховой обстановки, который передается в исполнительную часть ФНК.
В исполнительной части ФНК осуществляется объединение высокочастотных сигналов основного и дополнительного каналов приема. При этом в каждой ячейке зоны действия ФНК одна из четырех возможных комбинаций этих сигналов формируется с помощью суммирующего устройства (СУ) и регулируемых аттенюатора (Ат) и фазовращателя (Фв), на которые поступают управляющие сигналы от распределителя ФНК. Устройство фазирования (УФ) обеспечивает начальное фазирование сигнала ДК в зависимости от использованного вида поляризации (линейной или круговой).
Распределитель ФНК выполняет функцию согласования аналоговой и цифровой частей ФНК.
Программа адаптации реализуется в течение трех периодов обзора РЛС, составляющих рабочий цикл ФНК.
Если для компенсации помех используется секторизация области обзора, то в структуре РЛС используется адаптивный аттенюатор помех (ААП), представляющий собой многокаскадный УПЧ (рис. 2.7), коэффициент усиления которого регулируется по ступенчатому закону.
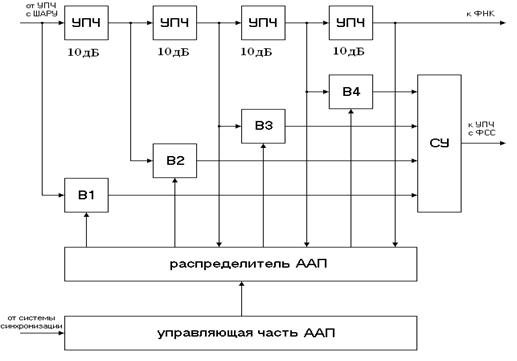
Рис. 2.7. Принцип действия адаптивного аттенюатора помех
Это достигается поочередным исключением из линейки каскадов УПЧ нескольких каскадов, начиная с последнего каскада. Данное устройство является адаптивным и автоматически приспосабливается к непрерывно изменяющейся помеховой обстановке. Работа ААП также основана на использовании цифровой карты помех. Принимаемый сигнал снимается с выходов трех последних звеньев УПЧ и поступает в управляющую часть ААП для анализа и оценки текущего уровня помех в каждой ячейке отдельно.
В анализаторе помех, состоящем из параллельных каналов, производится детектирование каждого из трех входных сигналов и сравнение с установленным пороговым уровнем, одинаковым для всех каналов. Этот уровень соответствует допустимому превышению помехами уровня собственных шумов на выходе приемного устройства.
В исполнительной части ААП при воздействии определенного управляющего сигнала открывается только один из вентилей В1…В4, через который на вход суммирующего устройства (СУ) поступает сигнал ПЧ с выхода последнего звена УПЧ, где еще не превышен установленный пороговый уровень.
2.1.5. Система синхронизации и формирования меток азимута
первичной трассовой РЛС
Главными функциями системы синхронизации и формирования меток азимута являются: обеспечение синхронной работы основных частей радиолокационного комплекса (первичной РЛС, вторичной РЛС и АПОИ); синхронизация оборудования первичной РЛС; формирование сигналов временной шкалы (меток дальности) и сигналов шкалы азимута.
В современных РЛС с применением цифровых систем обработки сигналов эти требования выполняются благодаря использованию специальных устройств формирования опорных сигналов – цифровых синтезаторов сетки частот, обеспечивающих привязку всех опорных частот к частоте одного высокостабильного источника колебаний.
В системе синхронизации и формирования меток азимута можно выделить два относительно самостоятельных устройства: синхронизации и формирования азимутальных меток.
Центральным узлом устройства синхронизации является генератор опорной частоты  кГц, стабилизированный кварцем. Частота
кГц, стабилизированный кварцем. Частота  выбирается из расчета формирования заданного минимального деления шкалы дальности
выбирается из расчета формирования заданного минимального деления шкалы дальности  км. Для получения такой шкалы производится деление частоты на 22. При последующем делении частоты на 10, 100 и т.д. формируются другие метки дальности (5, 50 км и т.д.).
км. Для получения такой шкалы производится деление частоты на 22. При последующем делении частоты на 10, 100 и т.д. формируются другие метки дальности (5, 50 км и т.д.).
К числу основных узлов устройства синхронизации относятся: формирователь импульсов синхронизац
|
|
Дата добавления: 2014-01-11; Просмотров: 6067; Нарушение авторских прав?; Мы поможем в написании вашей работы!