КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Метод проекций векторного контура . ( Рычажные механизмы )
|
|
|
|
Методы геометро-кинематического исследования механизмов
* планов положений, скоростей и ускорений,
* проекций векторного контура,
* кинематических диаграмм,
* центроид,
* преобразования координат,
* экспериментальный,
другие.
Связь кинематических и передаточных функций
Линейные скорости
VL = dSL/ dt = (dSL/df1)*(df1/dt) = VqL * w1 ;
a L = d(Vql * w1)/dt = (dVqL/df1)*(df1/dt)*w1 + VqL* e1 = aqL* w12 + VqL* e1;
Угловые скорости
wi = dfi/ dt = (dfi /df1)*(df1/dt) = wqi * w1 ;
ei = d(wqi*w1)/dt = (dwi/df1)*(df1/dt)*w1 + wqi * e1 = eqi* w12 + wqi * ei.
Так как данные формулы получены как производные от скалярных величин, то при операциях с векторными величинами они применимы только для проекций этих величин на оси координат.
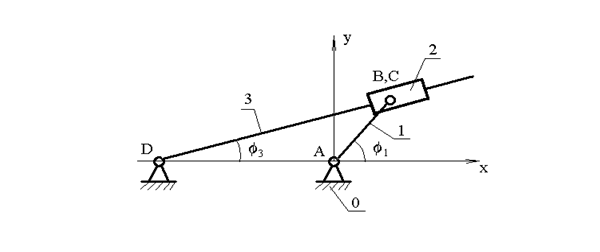
Рассмотрим простейший кулисный механизм.

|
|
Заменим кинематическую схему механизма эквивалентным векторным контуром
Тогда уравнение замкнутости векторного контура запишется
_ _ _
l AB = l AD + l DB
1. 1. Задача о положениях звеньев механизма
Проецируем векторный контур на оси координат и получаем координаты точки В механизма:
xB = lAB * cos (f1) = lAD* cos (p) + lDB * cos (f3);
yB = lAB * sin (f1) = lAD* sin (p) + lDB * sin (f3 );
из решения этой системы уравнений определяем неизвестные величины f3 и lDB, которые определяют положение звеньев и точек механизма
tg (f3) = sin (f3 ) / cos (f3) =
= lAB * sin (f1) / (lAB * cos (f1) - lAD* cos (p));
lDB = (lAB * sin (f1)) / sin (f3 );
1.2. Задача о первых кинематических передаточных функциях механизма
Продифференцируем уравнения проекций векторного контура по обобщенной координате и получим
VqBx = - lAB * sin (f1 ) = VqDB * cos (f3 ) - lDB * wq3 * sin (f3);
VqBy = lAB * cos (f1 ) = VqDB * sin (f3 ) + lDB * wq3 * cos (f3).
Из этой системы уравнений определяем первые передаточные функции VqB и wq3.
|
|
|
1.3. Задача о вторых передаточных функциях механизма.
Вторично продифференцируем уравнения проекций векторного контура по обобщенной координате и получим
aqBx = - lAB * cos (f1) = aqDB * cos (f3 ) - 2 * VqDB * w 3 * sin (f3) - lDB *
e q3 * sin (f3) - lDB * w32* cos (f3);
aqBy = - lAB * sin (f1) = aqDB * sin (f3 ) + 2 * VqDB * w3 * cos (f3) + lDB *
e q3 * cos (f3) - lDB * w32* sin (f3);
Из этой системы уравнений определяем вторые передаточные функции aqB и eq3.
| Диаграмма функции положения f3,рад 0 p 2p f1,рад Диаграмма первой передаточной функции wq3, - 0 p 2p f1,рад Диаграмма второй передаточной функции eq3, - 0 p 2p f1,рад Рис. 3.7. |
Цикловые кинематические (геометрические) диаграммы для кулисного механизма.
Циклом называется период времени или изменения обобщенной координаты по истечении которого все параметры системы принимают первоначальные значения.
Поэтому значения величин в начале и в конце цикла одинаковы.
|
|
|
Дата добавления: 2014-01-11; Просмотров: 742; Нарушение авторских прав?; Мы поможем в написании вашей работы!