КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основные принципы и понятия автоматического управления
|
|
|
|
В основу теории автоматического управления положена теория автоматического регулирования, которая сформировалась в самостоятельную научную дисциплину только к 1940 году. Регулирование представляет собой простейшую разновидность управления.
Автоматическим регулированием называется поддержание, постоянной некоторой заданной величины, характеризующей процесс, или изменение ее по заданному закону, осуществляемое при помощи измерения состояния объекта или действующих на него возмущений и воздействия на регулирующий орган объекта.
Под автоматическим управлением понимается автоматическое осуществление совокупности воздействий, выбранных из множества возможных на основании определенной информации и направленных на поддержание или улучшение функционирования управляемого объекта в соответствии с целью управления.
Сравнивая определения управления и регулирования, можно заключить, что все задачи регулирования входят в состав задач управления как более простые случаи.
Кроме того, задачи автоматического управления охватывают такие вопросы, как адаптация, или самонастройка системы управления, в соответствии с изменением ее параметров или внешних воздействий, вопросы обеспечения оптимального функционирования системы управления при различных условиях, автоматический выбор наилучших режимов из нескольких возможных и др., не входящих в круг задач автоматического регулирования.
Теория автоматического управления включает в себя теорию автоматического регулирования как основную и наиболее разработанную часть, однако, она ставит перед собой и более сложные задачи управления.
Система автоматического управления может быть представлена двумя основными частями: управляемым объектом (или сокращенно — объектом) и управляющим устройством.
|
|
|
В качестве объекта управления может рассматриваться как управляемое техническое устройство, так и более простая система управления. Во втором случае речь идет о некоторой иерархической системе управления, в которой система управления более сложная включает в себя управляемую ею более простую систему или подсистему. Обычно элементарными системами являются системы регулирования.
Первоначально рассмотрим объекты управления в более простых системах.
Состояние объекта определяется рядом величин, характеризующих как воздействие на объект внешней среды и управляющих устройств, так и протекание процессов внутри самого объекта.
Одни из этих величин непрерывно измеряются в процессе работы и называются контролируемыми. Другие, оказывая влияние на режим работы объекта, не измеряются и называются неконтролируемыми.
Величины, выражающие внешние влияния на объект, носят название воздействий.
Воздействия, вырабатываемые управляющим устройством, называются управляющими величинами, или управляющими воздействиями.
Воздействия, не зависящие от управляющего устройства, называются возмущениями. Возмущения можно подразделить на два вида: а) нагрузка; б) помехи. Наличие изменяющейся во времени нагрузки обусловлено работой объекта, от нее объект принципиально не может быть защищен. Помехи бывают связаны с побочными нежелательными явлениями и всякое уменьшение их улучшает работу объекта.
Контролируемые величины, по которым ведется управление, носят название управляемых, или регулируемых, величин. Обычно регулируемые величины в той или иной степени характеризуют качественные показатели процесса в управляемом объекте.
В общем случае объект управления ОУ может быть представлен схемами, показанными на рисунке 1.1.1, а и б. Здесь совокупность контролируемых внешних воздействий обозначена вектором  , неконтролируемых внешних воздействий — вектором
, неконтролируемых внешних воздействий — вектором  , управляющих воздействий — вектором
, управляющих воздействий — вектором  , управляемых величин — вектором
, управляемых величин — вектором  . Если известно математическое описание объекта, то известна и система уравнений, связывающая управляемые величины со всеми внешними воздействиями на объект.
. Если известно математическое описание объекта, то известна и система уравнений, связывающая управляемые величины со всеми внешними воздействиями на объект.
|
|
|
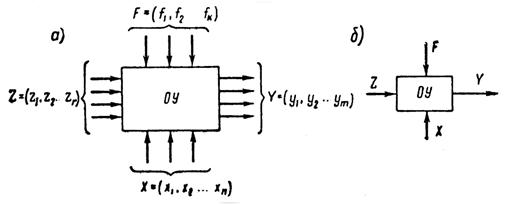
Рисунок 1.1.1 – Схема объекта управления
При известных начальных условиях эта система уравнений дает возможность по внешним воздействиям X, Z, F найти выходные управляемые величины Y.
Если объект характеризуется одной управляющей и одной управляемой величиной, т.е. векторы X и Y имеют по одной координате, то объект называется простым, или односвязным. При наличии нескольких взаимно связанных координат векторов X и Y объект называется многосвязным.
Каждый объект управления может рассматриваться в условиях статики и динамики. В первом случае и внешние неуправляемые воздействия Z и F, и управляющие воздействия X рассматриваются постоянными, не зависящими от времени. Характеристиками объекта являются зависимости управляемых величин от внешних воздействий
 (1.1.1)
(1.1.1)
При изучении динамики исследуется зависимость  при заданных изменениях внешних воздействий
при заданных изменениях внешних воздействий  ,
,  и
и  . В этом случае уравнение (1.1.1) принимает вид системы дифференциальных уравнений.
. В этом случае уравнение (1.1.1) принимает вид системы дифференциальных уравнений.
Если эта система может быть сведена к системе линейных дифференциальных уравнений, то объект называется линейным. При описании объекта системой нелинейных дифференциальных уравнений его относят к нелинейным.
При изучении статики основной интерес представляет зависимость управляемой величины Y от управляющего воздействия X. Эта характеристика носит название статической характеристики управления. Характеристики управления  могут быть монотонными, когда
могут быть монотонными, когда  нигде не меняет знака (рисунок 1.1.2, а и б), и экстремальными, когда при некоторых, обычно оптимальных, значениях управляющей величины
нигде не меняет знака (рисунок 1.1.2, а и б), и экстремальными, когда при некоторых, обычно оптимальных, значениях управляющей величины  производная
производная  и меняет знак (рисунок 1.1.2, в).
и меняет знак (рисунок 1.1.2, в).
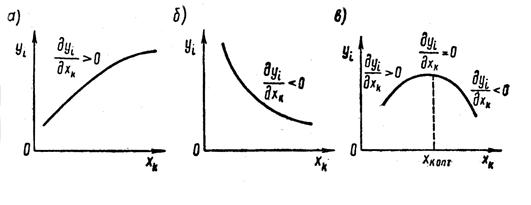
Рисунок 1.1.2 – Статические характеристики объекта управления
Объект управления может быть устойчивым, неустойчивым и нейтральным.
Объект устойчив, если после окончания внешнего воздействия он с течением времени возвратится к исходному состоянию или близкому к нему.
|
|
|
Нелинейные объекты могут быть устойчивы в "малом" — при малых воздействиях и неустойчивы в "большом" — при больших воздействиях.
Статические характеристики имеют смысл только для устойчивых объектов управления. Если в устойчивом объекте воздействие, например  , в течение некоторого времени t изменится на
, в течение некоторого времени t изменится на  (рисунок 1.1.3), то после окончания этого воздействия управляемая величина
(рисунок 1.1.3), то после окончания этого воздействия управляемая величина  по истечении некоторого времени приходит в исходное состояние или близкое к нему.
по истечении некоторого времени приходит в исходное состояние или близкое к нему.
Для таких объектов может быть предложена механическая аналогия в виде шарика в лунке, который может быть смещен при внешнем воздействии, однако возвращается обратно по окончании воздействия (рисунок 1.1.3, а). Устойчивые объекты иногда называются объектами с самовыравниванием.
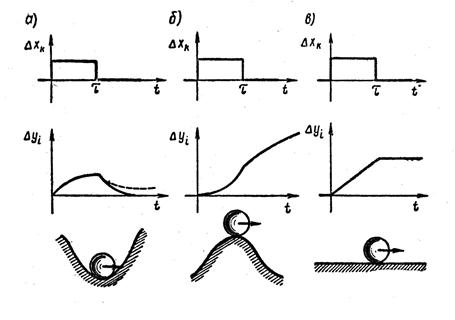
Рисунок 1.1.3 – Устойчивый (а), неустойчивый (б) и нейтральный (в)
объекты управления
В неустойчивом объекте по окончании воздействия, как бы мало оно ни было, управляемая величина продолжает изменяться. Для этих объектов механическая аналогия имеет вид шарика на вершине холма (рисунок 1.1.3, б). По окончании импульса шарик продолжает удаляться от положения равновесия.
Нейтральными объектами являются такие, в которых по окончании воздействия устанавливается новое состояние равновесия, отличное от первоначального и зависящее от произведенного воздействия. Шарик на горизонтальной плоскости является механической аналогией этого типа объектов (рисунок 1.1.3, в). Нейтральные объекты иногда называются объектами без самовыравнивания.
Один и тот же объект при нелинейной его характеристике в зависимости от режима работы может находиться в устойчивом, неустойчивом и нейтральном состояниях.
Установившиеся и переходные процессы в объектах могут изучаться при регулярных и случайных внешних воздействиях.
Всякое правильное протекание технического процесса характеризуется выполнением некоторых условий, приводящих к выполнению поставленной цели, т.е. целевой функции управления. Для характеристики этих условий введено понятие алгоритма функционирования.
|
|
|
Алгоритм функционирования ― совокупность предписаний, ведущих к правильному выполнению технологического процесса.
Если рассматриваемая техническая система сама по себе при наличии возмущающих воздействий, поступающих от внешней Среды, может выполнять предписанный алгоритм функционирования, то никакого управления системой не нужно. Если же техническая система сама не может выполнять предписанный алгоритм функционирования, то необходимо оказывать на нее специально организованные воздействия извне, которые в совокупности с собственными действиями технической системы приводили бы к выполнению этого алгоритма. Совокупность предписаний, определяющих характер этих воздействий извне, называется алгоритмом управления.
Этот признак — осуществление организованных воздействий извне — достаточно широко определяет понятие управление и является общим потому, что он может быть отнесен как к техническим, так и к другим объектам. Поэтому его положили в основу указанных выше общих понятий автоматического управления.
Управление не может полностью в любой момент времени нейтрализовать влияние возмущающих воздействий внешней среды. Поэтому возможно лишь приближенное осуществление алгоритма функционирования. Далее это будет рассмотрено подробнее, здесь же отметим, что иногда алгоритм управления должен учитывать как специально организованные, так и возмущающие воздействия.
Управление может быть ручным и автоматическим. В первом случае организованные воздействия извне осуществляются человеком. Во втором случае ― автоматическим управляющим устройством, в частности, — ЭВМ.
Рассмотренные общие понятия автоматического управления имеет следующие определения.
Управляемый объект ― совокупность технических средств (машин, агрегатов, аппаратов, устройств, ЭВМ, промышленных микроконтроллеров различной конструкции и с математическим обеспечением), осуществляющих технический или технологический процессы, которая нуждается в оказании специально организованных воздействий извне для достижения предписанного алгоритма функционирования и цели управления.
Цель управления ― обеспечение соотношения значений координат процессов в объекте управления или их изменения во времени, при которых достигаются желаемые результаты функционирования объекта.
Одноцелевой объект управления ― объект управления, предназначенный для достижения одного заданного результата функционирования.
Многоцелевой объект управления ― объект управления, предназначенный для достижения нескольких заданных результатов функционирования.
Сосредоточенный объект управления ― объект управления, расстояния между элементами (подсистемами) или другими частями которого не существенны для организации системы управления.
Рассредоточенный объект управления ― объект управления, расстояния между элементами (подсистемами) или другими частями которого существенны для организации системы управления.
Объект управления с сосредоточенными параметрами ― объект управления, математическая модель функционирования которого не содержит дифференциальных уравнений в частных производных.
Объект управления с распределенными параметрами ― объект управления, математическая модель функционирования которого содержит хотя бы одно дифференциальное уравнение в частных производных.
Аналоговый объект управления ― объект управления, в математической модели функционирования которого все координаты могут принимать любые значения в некоторых диапазонах непрерывной шкалы.
Дискретный объект управления ― объект управления, в математической модели функционирования которого все координаты могут принимать только конечное число значений.
Комбинационный дискретный объект управления ― дискретный объект управления, в математической модели которого значения выходных координат в каждый момент времени зависят только от значений входных координат в тот же момент времени.
Последовательностный дискретный объект управления ― дискретный объект управления, математической модели которого значения выходных координат хотя бы в один момент времени зависят от значений входных координат как в тот же момент времени, так и в предшествующие моменты времени.
Аналогово-дискретный объект управления ― объект управления, математическая модель функционирования которого содержит как координаты, принимающие любые значения в некоторых диапазонах непрерывной шкалы, так и координаты, принимающие конечное число значений.
Детерминированный объект управления ― объект управления, в математической модели функционирования которого управляемые координаты однозначно зависят от других координат.
Стохастический объект управления ― объект управления, в математической модели функционирования которого зависимость хотя бы одной управляемой координаты от других координат является вероятностной.
Стационарный стохастический объект управления ― объект управления, в математической модели функционирования которого вероятностные характеристики не зависят от времени.
Нестационарный стохастический объект ― объект управления, в математической модели функционирования которого некоторые вероятностные характеристики зависят от времени.
Инерционный объект управления ― объект управления, изменения управляемых координат которого отстают по времени от вызвавших их изменений управляющих координат.
Безинерционный объект управления ― объект управления, изменения управляемых координат которого практически не отстают от вызвавших их изменений управляющих координат.
Объект управления с чистым запаздыванием ― инерционный объект управления, изменения управляемых координат которого повторяют вызвавшие их изменения управляющих координат со сдвигом по времени.
Односвязный объект управления ― объект управления, в математической модели функционирования которого каждая управляемая координата зависит только от одной соответствующей ей управляющей координаты.
Многосвязный объект управления ― объект управления, в математической модели функционирования которого хотя бы одна управляемая координата зависит от нескольких управляющих координат или несколько управляемых координат зависят от одной и той же управляющей координаты.
Одномерный объект управления ― объект управления, в математической модели функционирования которого содержит одну управляющую координату и одну управляемую координату.
Многомерный объект управления ― объект управления, в математической модели функционирования которого содержит несколько управляющих и (или) управляемых координат
Алгоритм управления ― совокупность предписаний, определяющая характер специально организованных воздействий извне на управляемый объект в реальном времени.
Всякий алгоритм должен обладать: определённостью, массовостью и результативностью.
Определённость означает достаточную формализованность, строгость и общепонятность. Массовость гарантирует возможность применения алгоритма для решения нескольких задач одного класса. Результативность обеспечивает получение искомого результата после выполнения конечного числа элементарных операций (дифференцирования, умножения, интегрирования и т.д.).
Структура системы управления ― совокупность и характер связей и отношений между элементами (подсистемами) системы управления.
Обратная связь ― зависимость текущих воздействий на объект от его состояния, обусловленного предшествующими воздействиями на этот же объект. Обратная связь может быть естественной (присущей объекту) или искусственно организуемой. Различают отрицательную обратную связь и положительную обратную связь как обратную связь, действующую в первом случае в сторону уменьшения, а во втором ― в сторону увеличения отклонений текущих значений координат объекта от их предшествующих значений.
Закон управления ― математическая форма преобразований задающих воздействий, возмущений, воздействий обратных связей, определяющих управляющее воздействия.
Управление ― процесс осуществления воздействий, соответствующих алгоритму управления. Автоматическим управлением называется, если управление осуществляется без непосредственного участия человека.
Процесс выработки управляющих воздействий включает сбор, передачу и обработку необходимой информации, принятие решений, обязательно включающее определение управляющих воздействий во взаимосвязи с целевой функцией или поставленной целью управления.
Оптимальное управление ― управление, цель которого заключается в обеспечении оптимального значения принятого показателя качества управления или целевой функции.
Экстремальное управление ― управление, цель которого заключается в достижении и удержании экстремума заданного показателя качества функционирования объекта управления (объем выхода готовой продукции, минимум расхода топлива и т.д.)
Терминальное управление ― управление, цель которого заключается в переводе объекта управления в заданное конечное состояние в заданный момент времени.
Финитное управление ― управление, цель которого заключается в переводе объекта управления из заданного начального состояния в заданное конечное состояние за ограниченное время.
Автоматическое управляющее устройство ― устройство, осуществляющее воздействие, соответствующее алгоритму управления.
Координация ― управление, цель которого заключается в согласовании процессов в разных элементах (подсистемах) объекта управления.
Регулирование ― управление, цель которого заключается в обеспечении близости текущих значений одной или нескольких координат объекта управления к их заданным значениям.
Стабилизация ― регулирование, цель которого заключается в обеспечении постоянства значений управляемых координат на заданном интервале времени.
Следящее регулирование ― регулирование, цель которого заключается в обеспечении соответствия значений управляемых координат значениям воздействий (сигналов) уставки, меняющимся заранее не известным образом.
Программное регулирование ― регулирование, цель которого заключается в обеспечении соответствия значений управляемых координат значениям воздействий (сигналов) уставки, меняющимся заранее известным образом.
Противоаварийное управление ― управление, цель которого заключается в предотвращении развития аварийных событий, возникающих в системе управления.
Восстанавливающее управление ― управление, цель которого заключается в возвращении в состояние исправности, работоспособности или правильности функционирования системы управления, утраченное вследствие дефектов её элементов и (или) структуры.
Автоматическая система ― совокупность управляемого объекта и автоматического управляющего устройства, взаимодействующих между собой.
Приведенные определения обладают достаточно общим характером. Под управляемым объектом можно понимать любую силовую машину, технологический агрегат, устройства техники связи, отдельные блоки ЭВМ, а также их части или любую совокупность этих машин, аппаратов и устройств.
Следует отметить, что в современных сложных автоматических системах бывает трудно провести точную границу между её частями ― управляемыми объектами и управляющими устройствами. В некоторых случаях в качестве управляемых объектов должны рассматриваться отдельные машины или аппараты или даже их части, в других случаях ― совокупности машин или аппаратов, а в-третьих, ― машины или аппараты в совокупности с некоторыми из управляющих устройств, в частности — ЭВМ.
Понятие качества функционирования автоматической системы ― это комплекс требований, определяющих поведение системы в установившемся и переходном процессах отработки заданного воздействия. В качестве комплекса таких требований к системе можно отнести её быстродействие, точность (динамическая, статическая, интегральная и др. виды ошибок), перерегулирование и т.д.
Приведенные выше определения общих терминов позволяют перейти к определению общего понятия автоматики как отрасли технической науки.
Автоматика ― отрасль технической науки, охватывающая теорию автоматического управления, а также принципы построения автоматических систем и необходимых для них технических средств.
В автоматике имеются разделы, охватывающие отдельные области применения, такие, например, как: автоматический контроль, автоматическая защита, автоматический привод, автоматические вычислительные устройства и т.д.
Замкнутая система управления ― система управления, в которой осуществлено управление с обратной связью.
Разомкнутая система управления ― система управления, в которой управление осуществлено без обратной связи.
Система ручного управления ― система управления, вырабатывающая и (или) осуществляющая управляющие воздействия при участии человека-оператора.
|
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 4141; Нарушение авторских прав?; Мы поможем в написании вашей работы!