КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Анализ конечных автоматов
Полное описание поведения автомата заключается в определении последовательности выходных сигналов при возбуждении его в тактовые моменты времени некоторой последовательностью входных сигналов. Входная и выходная последовательности представляются наборами символов (или их номеров) из алфавитов Х и Y одинаковой длины l. Для такого описания, кроме характеристических функций, необходимо определить или задать начальное состояние автомата.
Наиболее удобно определять реакцию автомата на входную последовательность по его графу. Для этого достаточно проследить путь в графе, начиная от вершины начального состояния, по направлению дуг, которые отмечены очередными номерами из входной последовательности. Выходная последовательность определяется номерами, которыми отмечены дуги в порядке их следования ни пройденному пути, а последовательность состояний автомата номерами вершин, через которые проходит этот путь.
Так, из графа на рис. 11.2 для входной последовательности (2, 0, 1, 1, 2, 3) и начального состояния 0 имеем выходную последовательность (0, 1, 0, 0, 1, 1) и смену состояний автомата (1, 3, 0, 2, 2, 3). При начальном состоянии 2 и той же входной последовательности получаем соответственно (1, 1, 0, 0, 1, 1) и (2, 3, 0, 2, 2, 3).
С помощью графа автомата легко выделить следующие характерные типы его состояний:
1) преходящее состояние, из которого можно перейти, по крайнем мере, в одно другое состояние, но после этого уже нельзя возвратиться в него ни при каком воздействии (соответствующая вершина не имеет входящих дуг, но имеет хотя бы одну исходящую дугу);
2) тупиковое состояние, в которое можно перейти, по крайней море, из одного другого состояния, но после этого уже нельзя выйти из него ни при каком воздействии (соответствующая вершина не имеет исходящих дуг в другие вершины, но имеет хотя бы одну входящую дугу из другой вершины);
3) изолированное состояние, из которого нельзя перейти ни в какое другое состояние и в него нельзя попасть ни из какого другого состояния (соответствующая вершина содержит только петлю).
Аналогичные определения можно дать для некоторых совокупностей состояний, рассматриваемых как подавтоматы. Если начальное состояние автомата М принадлежит непустому множеству Si состояний, которое составляет тупиковый или изолированный подавтомат, М можно упростить исключением всех состояний, которые не принадлежат множеству Si, и всех дуг, начинающихся в этих состояниях.
Пусть М 1, М 2 и M 3 - соответственно преходящий, тупиковый и изолированный подавтоматы автомата М, которые характеризуются множествами состояний S 1, S 2 и S 3. Очевидно, выделение таких подавтоматов соответствует разбиению множества S состоянии автомата М на непересекающиеся подмножества S 1, S 2 и S 3, представляющие собой классы эквивалентности (S 1È S 2È S 3 = S и S 1Ç S 2Ç S 3 = Æ). Как следует из обобщенного графа (рис. 11.3), матрица соединения автомата может быть представлена в виде
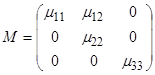 ,
где ,
где  - матрицы подавтоматов М 1, М 2 и M 3, - матрицы подавтоматов М 1, М 2 и M 3,  - матрица, характеризующая переходы от состояний преходящего автомата М 1ксостояниям тупикового автомата M 2. - матрица, характеризующая переходы от состояний преходящего автомата М 1ксостояниям тупикового автомата M 2.
| 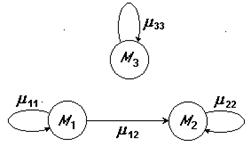 рис.11.3. обобщенный граф конечного автомата
рис.11.3. обобщенный граф конечного автомата
|
Отсюда следует, что разбиение автомата М на подавтоматы М 1, М 2 и M 3 можно осуществить преобразованием его матрицы соединений к стандартному виду путем перестановки соответствующих строк и столбцов.
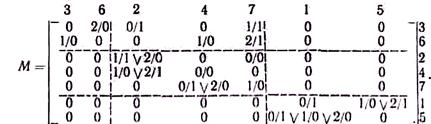
Пример. Для автомата, граф которого изображен на рис. 11.4, имеем:
| 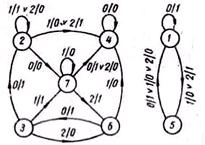 рис.11.4. Граф конечного автомата
рис.11.4. Граф конечного автомата
|
Отсюда следует, что S 1 = {3, 6} составляет преходящий подавтомат, S 2 = {2, 4, 7} - тупиковый подавтомат и S 3 = {1, 5} - изолированный подавтомат. Если начальное состояние принадлежит множеству S 2, то можно упростить автомат, исключив состояния S 1 È S 3 = {3, 6, 1, 5}, а в случае принадлежности начального состояния множеству S 3 автомат упрощается исключением состояний S 1 È S 2 = {3,6,2,4,7).
|
|
Дата добавления: 2014-01-13; Просмотров: 1307; Нарушение авторских прав?; Мы поможем в написании вашей работы!