КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Построение уравнений квазиравновесия
|
|
|
|
Формализуем процесс формирования уравнений, обеспечив единообразие их формирования.
Реакции в кинематических парах ориентируем по осям различных систем координат:
¾ в шарнире - по осям НСК;
¾ в ползуне - по осям МСК звена-ползуна;
¾ в высшей кинематической паре типа копир - по осям ЕСК в точке контакта.
В качестве оси поворота для записи уравнения момента примем центр МСК звена.
Силы проектируются на оси НСК.
В кинематической паре реакции, приложенные к взаимодействующим звеньям, равны и противоположны по знаку.
 |
Направление реакций выбирается по направлениям осей одной из систем координат.
Для реакций в КП типа «шарнир», как правило, выбираются направления осей НСК. Для реакций в КП типа «ползун» направления осей МСК перемещающейся части КП («ползуна») или ССК вдоль направляющей КП. Для реакций в КП типа «копир» направления осей ЕСК с центром в точке контакта. Положительное направление реакций принимается для кинематической пары звена с меньшим номером (L<N).
Реакции каждой кинематической пары образуют в системе уравнений клетку следующего вида:
Если компоненты реакций заданы в НСК
 Если компоненты реакций заданы в МСК звена L
Если компоненты реакций заданы в МСК звена L
Если компоненты реакций заданы в некоторой другой системе координат (например, ЕСК точки контакта K звена L),
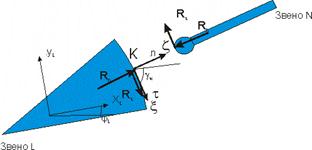

L - № звена, в котором записывается система уравнений,
N - № взаимодействующего звена,
jL - угол поворота местной системы координат звена L,
gk - угол поворота дополнительной системы координат (ЕСК в точке контакта кинематической пары) относительно МСК L- звена.
Силы трения Fтр, действующие в кинематических парах, принимаются в соответствии с законом Кулона Fтр = fN, где N - сила нормального давления в кинематической паре, f - коэффициент трения в контакте. Нередко сила нормального давления в кинематической паре является нелинейной функцией реакций в кинематической паре, что вызывает сложности при решении уравнений квазиравновесия. Вместе с тем, коэффициент трения обычно значительно меньше 1. Поэтому, как правило, нормальная реакция определяется по результатам расчетов на предшествующем шаге интегрирования, и силы трения включаются в правую часть уравнений равновесия как известные величины. Направление действия силы трения всегда противоположно направлению движения.
|
|
|
Силы трения определяются в зависимости от типа кинематической пары следующим образом:
для шарнира звена L

для ползуна звена L

для контакта по копиру звена L

где Tз,Tx,Tt - составляющие сил трения, ориентированные по соответствующим осям;
RX, RY, Ry,Rj,Rn - реакции в кинематических парах, ориентированные по соответствуюшим осям;
d - диаметр шарнира,
b - расстояние между точками опоры ползуна в направляющей,
 - относительная скорость движения в контакте.
- относительная скорость движения в контакте.
При учете сил трения надо иметь ввиду такую особенность, что сила трения покоя не является источником движения и нарастает до своей максимальной величины по мере увеличения действующей внешней силы, уравновешивая ее до момента страгивания (см. рис. 9).
Рис.9 Характер действия силы трения
Для записи уравнений квазиравновесия в упругом звене применяется метод РОЗУ (разрежем, отбросим, заменим, уравновесим).
 |
В уравнениях упругого звена записывается дополнительное количество уравнений, уравновешивающих разрезанные части, равное числу степеней свободы упругого звена. В уравнениях равновесия значение упругой силы указывается в правой части. Чтобы выполнить это условие реакции в кинематических парах упругого звена проецируются на направление координат упругой силы.
|
|
|
Например, для звена, изображенного на рисунке

Рассмотрим, как строятся уравнения квазиравновесия на примере механизма досылателя.
Схема механизма приведена на рис.10.
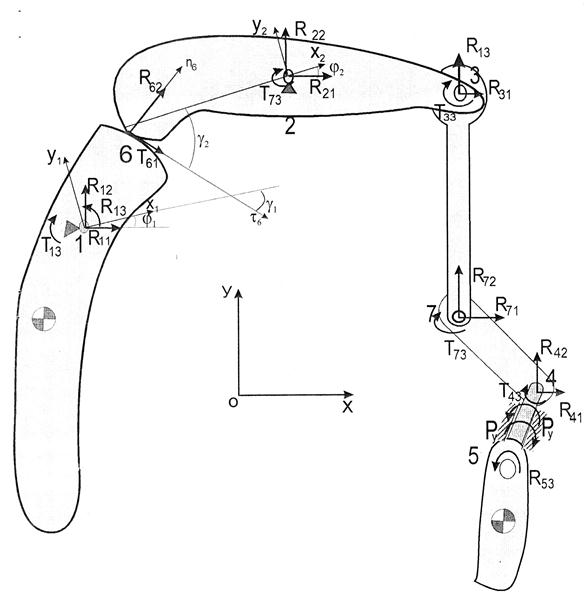
Рис.10. Расчетная схема механизма (действующие силы и реакции).
Нумерацию кинематических пар рекомендуется осуществлять в последовательности взаимодействующих звеньев, сначала центры МСК звеньев, а затем другие кинематические пары.
Кинематические пары 1, 2, 3, 4, 7 представляют собой шарниры.
Реакции в них ориентированы по осям НСК.
КП 6 - высшая кинематическая пара копирного типа.
Реакция  ориентирована по нормали в точке контакта,
ориентирована по нормали в точке контакта,
сила трения Т - по касательной.
Упругое звено 5 соединяет звено 4 с массивным звеном, на которое воздействует реактивный момент инерционной силы R53. Упругое звено соединяет две параллельные плоскости. Упругая сила ориентирована по моментной составляющей.
Силы трения определяются по формулам:

Упругая сила Ру определяется величиной деформации и скорости деформации упругого звена.
Расставляя неизвестные реакции и формируя правые части, получим следующую систему уравнений квазиравновесия (см. табл.1).
Система уравнений квазиравновесия Таблица 1
| R11 | R12 | R13 | R62 | R21 | R22 | R31 | R32 | R71 | R72 | R41 | R42 | R43 | R53 | b | 
| |||
| Звено 1 | прх | соs(j1+g1) | = | -T61sin(j1+g1) | ||||||||||||||
| пру | sin(j1+g1) | = | T61cоs(j1+g1) | |||||||||||||||
| М | 
| = | 
| |||||||||||||||
| Звено 2 | прх | - cоs(j2+g2) | = | T61sin(j2+g2) | ||||||||||||||
| пру | - sin(j2+g2) | = | -T61cоs(j2+g2) | |||||||||||||||
| М | x26cоsg2 + +y26sing2 | -(y3-y2) | (x3-x2) | = | 
| |||||||||||||
| Звено 3 | прх | -1 | = | |||||||||||||||
| пру | -1 | = | ||||||||||||||||
| М | -(y7-y3) | (x7-x3) | = | -T33 + T73 | ||||||||||||||
| Звено 4 | прх | -1 | = | |||||||||||||||
| пру | -1 | = | ||||||||||||||||
| М | (y7-y4) | -(x7-x4) | = | T43 - T73 | ||||||||||||||
| УЗ | М | Py | ||||||||||||||||
| М | -1 | = | -Py | -1 |
Решение системы линейных алгебраических уравнений определяет вектор реакций `Ri в кинематических парах участка механизма.
|
|
|
Ассоциативные свойства линейных систем позволяют решать построенные уравнения квазиравновесия для динамических систем с заранее неизвестными силами, формирующимися в процессе решения, весьма эффективно.
Если 
Исходя из этих свойств, вектор решения уравнений квазиравновесия можно построить следующим образом

 решения уравнения квазиравновесия, если компоненты упругой (внешней) силы, расположенные в правой известной части уравнений равны 1.
решения уравнения квазиравновесия, если компоненты упругой (внешней) силы, расположенные в правой известной части уравнений равны 1.
Каждой единичной компоненте упругой (внешней) силы будет соответствовать вектор решения – вектор «реактивных коэффициентов», а всем компонентам единичного вектора – матрица «реактивных коэффициентов». Для того чтобы различать полные реакции и «реактивные коэффициенты», обозначим матрицу «реактивных коэффициентов» следующим образом:  , где нижний индекс указывает на номер компоненты упругой (внешней) силы, а верхний на номер компоненты вектора реакций. Верхний индекс может быть двухзначным, тогда первый символ указывает номер кинематической пары, а второй – направление компоненты.
, где нижний индекс указывает на номер компоненты упругой (внешней) силы, а верхний на номер компоненты вектора реакций. Верхний индекс может быть двухзначным, тогда первый символ указывает номер кинематической пары, а второй – направление компоненты.
Структура матрицы «реактивных коэффициентов» представлена ниже.

Компоненты матрицы (вектора) реактивных коэффициентов эффективно используются в задачах эквивалентного приведения податливости и зазоров.
Существующие стандартные программы решения линейных алгебраических уравнений позволяют получить решения сразу для нескольких векторов правых частей одновременно, то есть получить сразу и вектор решения, и всю матрицу «реактивных коэффициентов».
|
|
|
|
|
|
|
Дата добавления: 2014-01-14; Просмотров: 334; Нарушение авторских прав?; Мы поможем в написании вашей работы!