КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Теория радаров
|
|
|
|
Три основных компонента радара — это трансмиттер, антенна и ресивер.
Основная задача радара — это обнаружение объекта в зоне действия радиосигнала, излучаемого трансмиттером, при котором выход ресивера в данное время соответствует эху, отраженному от объекта. Трансмиттер также содержит усилитель, который увеличивает мощность электромагнитного импульса, и антенну, которая транслирует электромагнитные волны. Радиоресивер получает отраженные от объекта электромагнитные волны посредством антенны, преобразуя их в ток. Для повышения надежности детектирования и отделения полезного сигнала от шумов в схеме обработки сигнала непрерывно выполняется сравнение амплитуды выхода ресивера с некоторым предустановленным или адаптивно вычисляемым порогом. Время, за которое радиоимпульс проходит путь до объекта и обратно, соответствует расстоянию 2R и равняется 2R/с, где c — скорость распространения электромагнитной волны (скорость света). Поскольку скорость света c остается практически неизменной в любой среде, очевидны преимущества радаров по точности в сравнении с ультразвуковыми датчиками.
После того как объект обнаружен, радар отслеживает его положение или скорость. Моностатический радар измеряет положение в сферической координатной системе с начальной точкой в фазовом центре антенны радара. Направление обзора антенны (называемое boresight direction) лежит вдоль оси Х. Угол θ называется углом азимута; для анализа положения используется также угол повышения φ, который зависит от ориентации антенны (рис. 52). В большинстве современных систем АКК φ можно не учитывать.
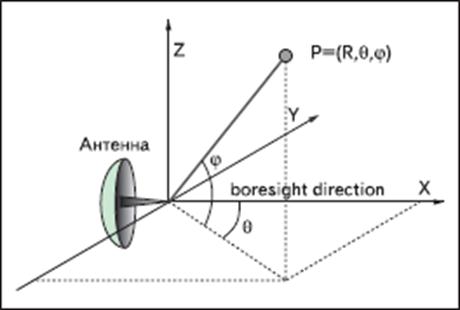
Рис. 1. Сферическая координатная система для радарных измерений
|
|
|
Моностатическим называется радар, в котором антенны трансмиттера и ресивера объединены (то есть используется одна и та же антенна). Радары данного типа составляют большинство современных устройств. В бистатическом радаре антенны трансмиттера и ресивера разделены.
Угловое положение определяется путем анализа свойств отраженного волнового сигнала. Радар локализует положение цели за счет получения угла азимута относительно опорной линии или точки радарной антенны и расстояния range. Угол азимута цели определяется как угловое расстояние между опорной линией антенны (в направлении перпендикуляра от опорной точки антенны boresight) и прямой, соединяющей опорную точку радарной антенны и апертурную точку цели. Расстояние до цели (range) определяется как расстояние от антенной опорной точки до цели.
Хотя угол азимута и расстояние позволяют вычислить положение цели, возможны ошибки, возникающие вследствие изменений температуры и флуктуаций напряжения волны. Процентная ошибка между вычисленным и фактическим расстоянием может составлять порядка 10–30%; для ее уменьшения в радарных системах используется калибровка [118].
Скорость оценивается посредством доплеровского смещения эха цели. Эффект Доплера состоит в изменении частоты и длины волн, регистрируемых ресивером, что вызвано относительным движением их источника (детектируемого объекта) или приемника. Когда радар и объект неподвижны, отраженный сигнал будет иметь ту же частоту, что и оригинальный сигнал, и несколько ослабленную амплитуду, то есть скорость, равную нулю, невозможно измерить. Когда детектируемый объект удаляется, второй сегмент сигнала проходит большее расстояние, чем первый сегмент, что растягивает волну, уменьшая ее частоту, длина волны при этом увеличивается. Если же объект приближается к условно неподвижному в выбранной системе отсчета ресиверу, второй сегмент волны проходит более короткое расстояние, что увеличивает частоту принятого сигнала, длина волны при этом уменьшается. Регистрируя изменения частоты, радар вычисляет радиальную составляющую скорости объекта, которой является проекция скорости на прямую, проходящую через объект и радар. Доплеровский метод обеспечивает измерение только радиальной составляющей скорости, но последовательность измерений положения и радиальной скорости позволяют сделать вывод о динамике объекта в трех измерениях.
|
|
|
Радары также могут быть использованы для генерирования двумерных изображений области. Такие изображения используются для анализа местности и навигации, но их разрешение меньше, чем у оптических камер, и поэтому радары не представляют в аналогичных задачах интереса для автоэлектроники, несмотря на преимущества — очень низкий уровень ослабления электромагнитных волн в воздухе позволяет радарам «видеть» сквозь облака, туман, осадки.
Отличительная черта радарной системы тип используемой техники модуляции для получения информации о расстоянии и скорости.
Известен ряд различных радарных методов. Выделяют две большие группы: 1) импульсные (недоплеровские и доплеровские) и 2) радары с незатухающей гармонической волной (continuous wave, CW), немодулированные, частотно-модулированные (FMCW), радары с частотной манипуляцией (ЧМн) или frequency shift keying (FSK), spread-spectrum радары. К другим классификационным признакам относятся различия в типах антенн и в методах, используемых для извлечения угловой информации. Среди доплеровских радаров выделяются импульсные и непрерывного действия (частотно-модулированные FMCW).
|
|
|
|
Дата добавления: 2014-01-14; Просмотров: 1169; Нарушение авторских прав?; Мы поможем в написании вашей работы!