КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Принцип действия электропривода с бесконтактным двигателем постоянного тока
 |
Наиболее простым в реализации является привод, получивший название «Электропривод с бесконтактным двигателем постоянного тока», т.к. в качестве источника питания для него может использоваться любой источник постоянного тока – аккумуляторная батарея или выпрямитель. Наиболее предпочтительно его использование в маломощных приводах, не требующих регулирования скорости – компьютерах, видео – и аудиотехнике и т.п. В его состав входят: синхронный двигатель постоянными магнитами на роторе; коммутатор и датчик положения ротора. 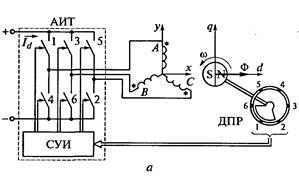
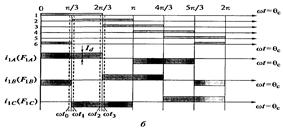
Рис.2.18. Функциональная схема управления двигателем.
Функциональная схема управления бесконтактным двигателем постоянного тока представлена на рис.2.18,а. Обмотка статора двигателя двухфазная или трехфазная с одной парой полюсов. На роторе закреплен постоянный магнит (SN), создающий магнитный поток Ф. Питание на обмотки подается с электронного коммутатора (АИТ), состоящего из шести ключей (1-6), включенных по мостовой схеме. Управление ключами осуществляется через систему управления (СУИ) импульсами, поступающими с датчика положения ротора (ДПР). На неподвижной части датчика расположены шесть чувствительных элементов, пронумерованных цифрами 1-6, также как и ключи коммутатора. Ротор датчика обычно выполняется в виде сегмента с углом 2π/3, расположенного на валу двигателя. Сегмент в любой момент времени перекрывает два чувствительных элемента, которые при этом активизируются и через СУИ воздействуют на ключи коммутатора с тем же номером, замыкая их и удерживая в замкнутом состоянии все время, пока элемент перекрыт вращающимся сегментом.
 Графики иллюстрируют замкнутые состояния ключей (1-6) и токи фаз (i1A, i1B, i1C) при различных углах поворота ротора θС. В любой момент времени замкнуты один ключ из группы 1-3-5 и один из группы 4-6-2, в результате чего ток Id протекает через две фазы обмотки статора. Для обеспечения однозначности переключений взаимная ориентация фаз обмотки статора, полюсов магнита ротора и частей датчика должны быть согласованы так, как это показано на рис.2.18,а при начальном положения ротора (θС = 0). Этому соответствует замкнутое положение ключей 1 и 6, а вектор потока ротора Ф и ориентированная по нему продольная ось d системы координат d-q, связанная с ротором, перпендикулярны оси фазы А.
Графики иллюстрируют замкнутые состояния ключей (1-6) и токи фаз (i1A, i1B, i1C) при различных углах поворота ротора θС. В любой момент времени замкнуты один ключ из группы 1-3-5 и один из группы 4-6-2, в результате чего ток Id протекает через две фазы обмотки статора. Для обеспечения однозначности переключений взаимная ориентация фаз обмотки статора, полюсов магнита ротора и частей датчика должны быть согласованы так, как это показано на рис.2.18,а при начальном положения ротора (θС = 0). Этому соответствует замкнутое положение ключей 1 и 6, а вектор потока ротора Ф и ориентированная по нему продольная ось d системы координат d-q, связанная с ротором, перпендикулярны оси фазы А.
|
|
|
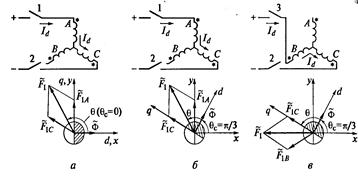
В этом случае угол θС отсчитывает-ся от оси Х неподвижной системы координат Х-У, связанной со стато-
ром. На рис.2.19 для трех моментов времени показано взаимное распо- ложение векторов намагничиваю-
щих сил фазных обмоток F1A, F1В, F1С и результирующей F1, определяемой как геометрическая сумма фазных векторов с учетом направления то- Рис.2.19. Расположение пространственных векторов
ков (начала обмоток отмечены значком *), а также потока ротора Ф.
При вращении ротора против часовой стрелки в момент времени t1, следующий непосредственно за моментом времени t0 (рис.2.19,а), только что замкнулся ключ 2 вместо разомкнувшегося ключа 6. Ток протекает от начала к концу фазы А и от конца к началу фазы С, что определяет положение векторов F1A и F1С и результирующего вектора F1. Ротор и связанный с ним вектор потока Ф еще находятся в положении, показанном на рис.2.18,а. Двигатель развивает момент: МД = 3/2|F1||Ф|sinθ, где |F1| и |Ф| - модули намагничивающей силы обмотки статора и потока ротора, а θ – угол между векторами, равный в данный момент времени 2π/3. Угол θС соответствует положению ротора в неподвижной системе координат Х-У. Он задает очередность переключения ключей.
Под действием электромагнитного момента ротор поворачивается против часовой стрелки и угол θ уменьшается. Когда он уменьшится до значения π/2, момент достигнет максимума, а при дальнейшем уменьшении угла начнет уменьшаться. При t = t2 угол θ станет равным θС = π/3 (рис.2.19,б) и момент двигателя уменьшится до значения, существовавшего при t = t1. Если бы ключи не переключились, он бы продолжал уменьшаться и дальше. Однако при θ = π/3 разомкнется ключ 1 и замкнется ключ 3 (рис.1,б), что соответствует времени t = t3. В результате вектор F1 скачком повернется на угол π/3 (рис.2.19,в). Взаимное расположение векторов оказывается при этом таким же, как на рис.2.19,а, но положение ротора отличается на π/3. Этот процесс повторяется непрерывно и ротор вращается.
|
|
|
При необходимости регулирование скорости может производиться изменением напряжения постоянного тока вручную или организацией замкнутого контура регулирования с датчиком скорости. Однако последнее приведет к значительному усложнению системы и поэтому с данным способом управления не используется. Механическая характеристика привода без датчика скорости мягкая, и изменения скорости при изменении нагрузки значительны. Поэтому его применение оправдано только в устройствах с постоянным статическим моментом.
Момент двигателя и скорость имеют пульсирующий характер, т.к. переключения происходят всего шесть раз за один оборот двигателя. Наличие существенных пульсаций момента и связанная с этим неравномерность вращения являются основным недостатком рассмотренного способа управления. Этот недостаток можно устранить только переходом к синусоидальной форме тока обмотки статора. Частота тока и в этом случае должна определяться датчиком положения ротора.
Несмотря на указанные недостатки, рассмотренный электропривод с бесконтактным двигателем постоянного тока достаточно широко используется в устройствах бытовой и оргтехники с маломощными двигателями, у которых не требуется регулирования скорости, время работы невелико и вопросы энергопотребления не актуальны, а основное условие – минимальные габариты и стоимость.
|
|
|
|
|
Дата добавления: 2014-10-15; Просмотров: 1208; Нарушение авторских прав?; Мы поможем в написании вашей работы!