КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
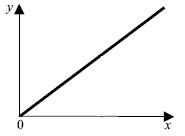
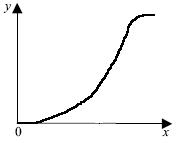
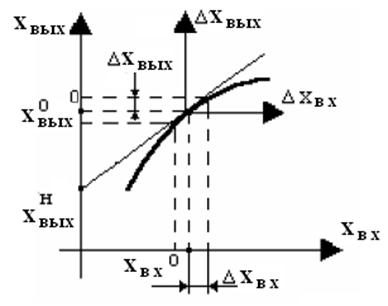
Геометрическая интерпретация линеаризации
|
|
|
|
Имаев Д.Х. и др. Анализ и синтез систем управления. Теория. Методы. Примеры решения типовых задач с использованием персонального компьютера. - Санкт- Петербург, Гданьск, Сургут, Томск, 1998. - 172 с.
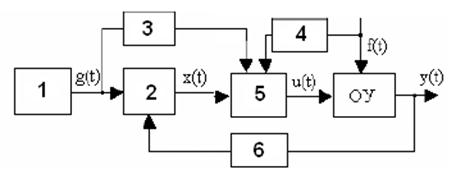
Классификация САУ
1. По принципу управления
- разомкнутая
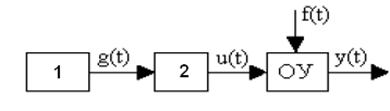
-замкнутая
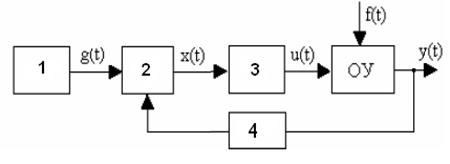
- комбинированная
2. По цели управления
- регулирования y(t) à const
- слежения y(t) à x(t) – var
- управления y(t) à ужел(t) – var
3. По виду математических моделей ОУ и блоков САУ
- линейные (линеаризованные)
- нелинейные
4. По количеству регулируемых параметров
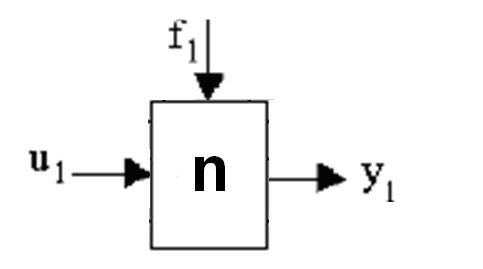
- одномерные (у всех блоков один вход, один выход)
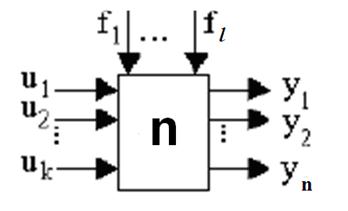
- многомерные
5. По характеру изменения сигналов по времени
- непрерывные (аналоговые)
- дискретные
- модулированные
6. По характеру изменения параметров ОУ и блоков САУ
- стационарные
"a, b, c,… = const
- нестационарные
$ a, b, c,… = var (t)
- c запаздыванием
а = aе-t
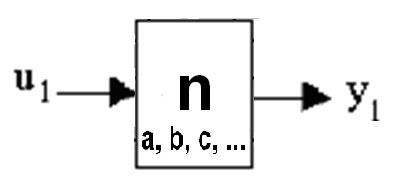
Понятие динамического звена
Каждый элемент САУ – динамическое звено. Для динамического звена известны «вход» - X и «выход» - Y и математическое описание преобразования «вход - выход»
Примеры динамических звеньев

| 
|
Динамическое звено характеризуется:
| - статической характеристикой
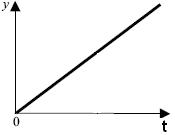
| - динамической характеристикой
|
Вывод уравнения преобразования динамического звена

Хвх(t)
 ? Хвых(t)
? Хвых(t)
Динамика выходного процесса Хвых(t) описывается произвольным уравнением:
y( вых(t),
вых(t), вых) = F(вх(t), вх,
вых) = F(вх(t), вх,  вх)
вх)
Установившийся процесс в системе имеет место при некоторых значениях вх =x0вх; вых =x0вых. Тогда установившееся состояние данного звена:
y(x0вых, 0)= F(x0вх, 0, 0)
|
|
|
В динамическом процессе
вых = x0вых + Dвых вх = Dвх вх = Dвых
вх = x0вх + Dвх вых = Dвых
Разложим в ряд Тейлора уравнение динамики
y(x0вых) +  Dвых +
Dвых +  Dвых + … = F(x0вх) +
Dвых + … = F(x0вх) +  Dвх +
Dвх +  Dвх +
Dвх +  Dвх + …
Dвх + …
Вычтем из него уравнение статики и отбросим высокие производные
Dвых + Dвых = Dвх + Dвх + Dвх
В последнем уравнении обозначим

 = a0; = a1;
= a0; = a1;  = b0;
= b0;  = b1;
= b1;  = b2; Dвх º ; Dвых º y
= b2; Dвх º ; Dвых º y
Тогда получим дифференциальное уравнение

 + b0x или
+ b0x или 
Здесь an ¼ a0, bm ¼ b0 - постоянные величины, параметры звена; x - входное воздействие;
y – выходной сигнал звена; n и m - целые числа (n ³ 0, m ³ 0, n ³ m); n - порядок звена
|
|
|
|
|
Дата добавления: 2014-10-22; Просмотров: 610; Нарушение авторских прав?; Мы поможем в написании вашей работы!