КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Индикаторная потенциометрическая дистанционная передача
|
|
|
|
ПОТЕНЦИОМЕТРИЧЕСКИЕ ДИСТАНЦИОННЫЕ ПЕРЕДАЧИ ПОСТОЯННОГО ТОКА
Электрические дистанционные передачи этого типа получили наибольшее распространение в приборной автоматике. Они более чувствительны и просты по устройству в сравнении с передачами на переменном токе, однако обладают, как правило, и меньшей мощностью. Поэтому для дистанционного управления силовыми устройствами основное применение находят более мощные дистанционные передачи переменного тока.
В принципе потенциометрические дистанционные передачи постоянного тока могут использоваться как в качестве индикаторных, так и в качестве следящих (силовых) электрических дистанционных передач.
Какотмечалось выше, индикаторная электрическая дистанционная передача представляет собой систему, которая позволяет электрическим методом передавать на измерительный прибор (индикатор) сигналы, получаемые от датчика. При этом датчик и индикатор могут находиться на значительном расстоянии один от другого.
Любая индикаторная дистанционная передача состоит из трех основных элементов: датчика сигналов, линии связи и измерительного прибора (индикатора).
Блок-схема индикаторной дистанционной передачи показана на рис. 2.1, где обозначено: Д - датчик сигналов; П - приемник, или индикатор (указатель), передачи; α - входной сигнал (угол поворота датчика); α' - перемещение стрелки указателя. В индикаторных потенциометрических передачах в качестве датчика сигналов используется линейный или круговой потенциометрический датчик. Первый из них применяется в передачах с ограниченным углом поворота (менее 360°), второй - в пределах с неограниченным углом поворота (круговые передачи). В качестве измерительного прибора (индикатора) обычно используется магнитоэлектрический лагометр с тремя неподвижными рамками (катушками) и подвижным постоянным магнитом. Линия связи дистанционной передачи представляет собой электрические провода, соединяющие датчик с измерительным прибором.
|
|
|

|
| Рис.2.1 Блок-схема индикаторной дистанционной передачи |
Среди индикаторных потенциометрических дистанционных передач наиболее широко применяются круговые передачи с неограниченным углом поворота. В качестве датчика сигналов в круговых передачах используется, как отмечалось, круговой потенциометрический датчик. Такие системы могут использоваться, в частности, для передачи на индикатор, расположенный в кабине, положений магнитной стрелки, находящейся вне кабины.
Рассмотрим устройство и принцип действия элементов, составляющих круговую индикаторную потенциометрическую дистанционную передачу.
|
| Рис. 2.2 Круговой потенциометрический датчик |
Круговой потенциометрический датчик представляет собой кольцевой реостат с угловым перемещением ползунка, которое преобразуется в электрический сигнал (напряжение) на выходе датчика.
Датчик имеет каркас в виде кольца, изготовленный из изоляционного материала. На кольце равномерно в один слой размещена обмотка из высокоомного провода (константан, манганин и т. п.).
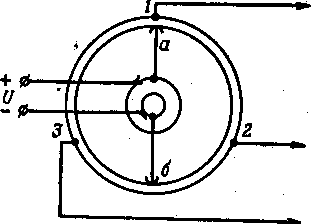
Подвод напряжения питания к обмотке датчика осуществляется через два контактных кольца и две пары щеток (рис. 2.2). Одна пара щеток, как видно из рисунка, обеспечивает соединение источника питания с кольцами, вторая пара (щетки а и б) жестко связана с кольцами.
Контактные кольца укреплены на оси датчика. Подвижные щетки а и б касаются обмотки потенциометра всегда в диаметрально противоположных точках. Ось датчика механически соединяется с валом, угол поворота которого необходимо передать на расстояние. При повороте вала на некоторый угол на такой же угол поворачиваются контактные кольца и связанные с ними щетки а и б, при этом изменяется положение этих щеток на обмотке потенциометра.
|
|
|
Съем выходных сигналов (напряжений) датчика производится с трех неподвижных точек (отпаек) 1, 2, 3 обмотки в виде напряжений U 12, U 23, U 31. Указанные точки (отпайки) сдвинуты одна относительно другой на угол 120°.
При повороте оси датчика происходит поворот щеток а и б относительно обмотки, что приводит к изменению потенциалов неподвижных точек 1, 2, 3. Последнее обусловливает изменение величин напряжений U 12, U 23, U 31, получаемых на выходе датчика.
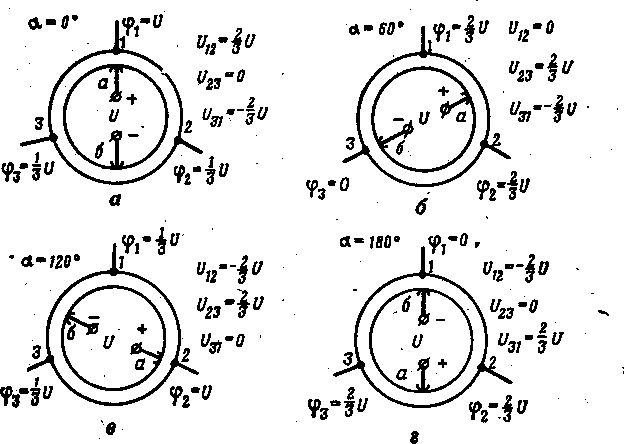
Проследим, как изменяются выходные напряжения датчика U 12, U 23, U 31 при изменении входной величины, т. е. угла поворота а оси датчика. Для этого определим значения потенциалов неподвижных точек 1, 2, 3 при различных значениях α и, следовательно, при различных положениях подвижных щеток а и б на потенциометре.
На рис. 2.3 показан круговой потенциометр при различных положениях указанных щеток (различных значениях α). Примем за исходное (нулевое) положение оси датчика (α = 0) такое положение, при котором подвижная щетка а расположена в точке 1 (рис. 2.3, а). Пусть минус источника питания датчика U заземлен. Тогда потенциал щетки б, соединенной с минусом источника, всегда равен нулю φб = 0 независимо от положения этой щетки на потенциометре. Поэтому потенциалы всех других точек потенциометра удобно отсчитывать от нулевого потенциала, т. е. от щетки б.
Как уже отмечалось, подвижные щетки а и б касаются обмотки потенциометра всегда в диаметрально противоположных точках. Поэтому линия, соединяющая эти щетки, делит кольцевой потенциометр на две равные части, каждая из которых составляет 180°. Обмотка потенциометра всегда делится щетками а и б также на две равные части, которые включены параллельно по отношению к источнику питания U. Поэтому при равномерно намотанной обмотке напряжение, приходящееся на один градус потенциометра, составляет величину  .
.
Из рис. 2.3, а видно, что точка 2 удалена от щетки б (точка нулевого потенциала) на 60°. Тогда потенциал данной точки φ2 будет равен
 .
.
То же самое относится к точке 3, которая находится на второй параллельной ветви обмотки и удалена от щетки б также на угол 60°, т. е.  .Соответственно, потенциал точки 1,удаленной на 180° от точки б, будет
.Соответственно, потенциал точки 1,удаленной на 180° от точки б, будет  .Таким образом, потенциал той или иной точки потенциометра в пределах дуги 180° будет тем больше, чем дальше она отстает от щетки б (точки нулевого потенциала). Точки потенциометра, равноудаленные от щетки б, имеют одинаковые потенциалы.
.Таким образом, потенциал той или иной точки потенциометра в пределах дуги 180° будет тем больше, чем дальше она отстает от щетки б (точки нулевого потенциала). Точки потенциометра, равноудаленные от щетки б, имеют одинаковые потенциалы.
|
|
|
|
| Рис.2.3. Распределение потенциалов точек кругового потенциометра при различных значениях угла поворота α подвижных щеток (а, б, в, г) |
Получив значения потенциалов в точках 1, 2, 3 потенциометра (рис. 2.3,а), можно записать выражения для выходных напряжений U 12, U 23, U 31 при α = 0:
 ;
;
 ;
;
 .
.
Аналогичным образом можно определить величину потенциалов точек 1, 2, 3 и выходных напряжений U 12, U 23, U 31при других значениях угла α.
Так при повороте оси потенциометра (щеток а и б)по направлению вращения стрелки часов на угол α = 60° (рис. 2.3, б) потенциалы неподвижных точек 1, 2, 3 будут:
 ;
;
 ;
;
 .
.
Аналогично можно составить выражения для φ 1, φ 2, φ 3 и U 12, U 23, U 31при углах α, например, равных 240 и 300°, чтобы проследить характер изменения выходных напряжений потенциометра за один полный оборот подвижных щеток а и б. Используя полученные значения выходных напряжений U 12, U 23, U 31 для разных α, можно построить статическую характеристику кругового потенциометрического датчика, т. е. зависимость  ;
;  ;
;  .
.
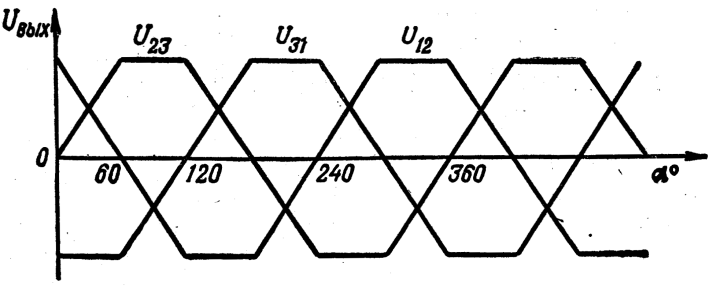
Данная характеристика показана на рис. 2.4, из которого видно, что закон изменения ; ; напоминает характер изменения ЭДС в трехфазной системе переменного тока, состоящей из трех одинаковых обмоток, расположенных под углом 120° одна к другой.
Из электротехники известно, что такие трехфазные системы способны создавать вращающееся магнитное поле, которое совершает один полный оборот за один период переменного напряжения.
Из рис. 2.4 также видно, что каждое из выходных напряжений U 12, U 23 и U 31 совершает полный цикл изменения за один оборот подвижных щеток (оси) датчика.
Таким образом, каждому полному обороту оси датчика соответствует один период изменения выходных напряжений U 12, U 23, U 31.
|
|
|
|
| Рис. 2.4. Статическая характеристика кругового потенциометра |
Это обстоятельство, как увидим в дальнейшем, обусловливает синхронное вращение стрелки индикаторного прибора дистанционной передачи по отношению к оси датчика.
Линия связи индикаторной потенциометрической передачи представляет собой, как уже отмечалось, три электрических провода, с помощью которых соединяют три неподвижные точки 1, 2, 3 кругового потенциометра с одноименными точками 1, 2, 3 на указателе (индикаторе).
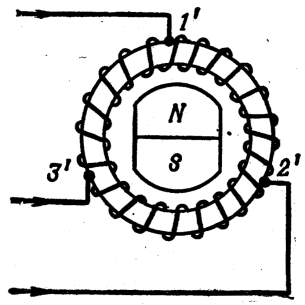
Индикатор, или указатель передачи, представляет собой магнитоэлектрический логометр (рис. 2.5). Неподвижная часть прибора (статор) имеет вид кольца с обмоткой. Кольцо (магнитопровод) набирают из листов электротехнической стали.
|
| Рис. 2.5. Индикатор дистанционной передачи |
С трех точек обмотки (1', 2', 3'), взаимно несмещенных на 120°, сделаны выводы (отпайки), так же как в круговом потенциометре (датчике) передачи. В результате вся обмотка индикатора разбивается на три части (три катушки), оси которых сдвинуты одна относительно другой на 120°.
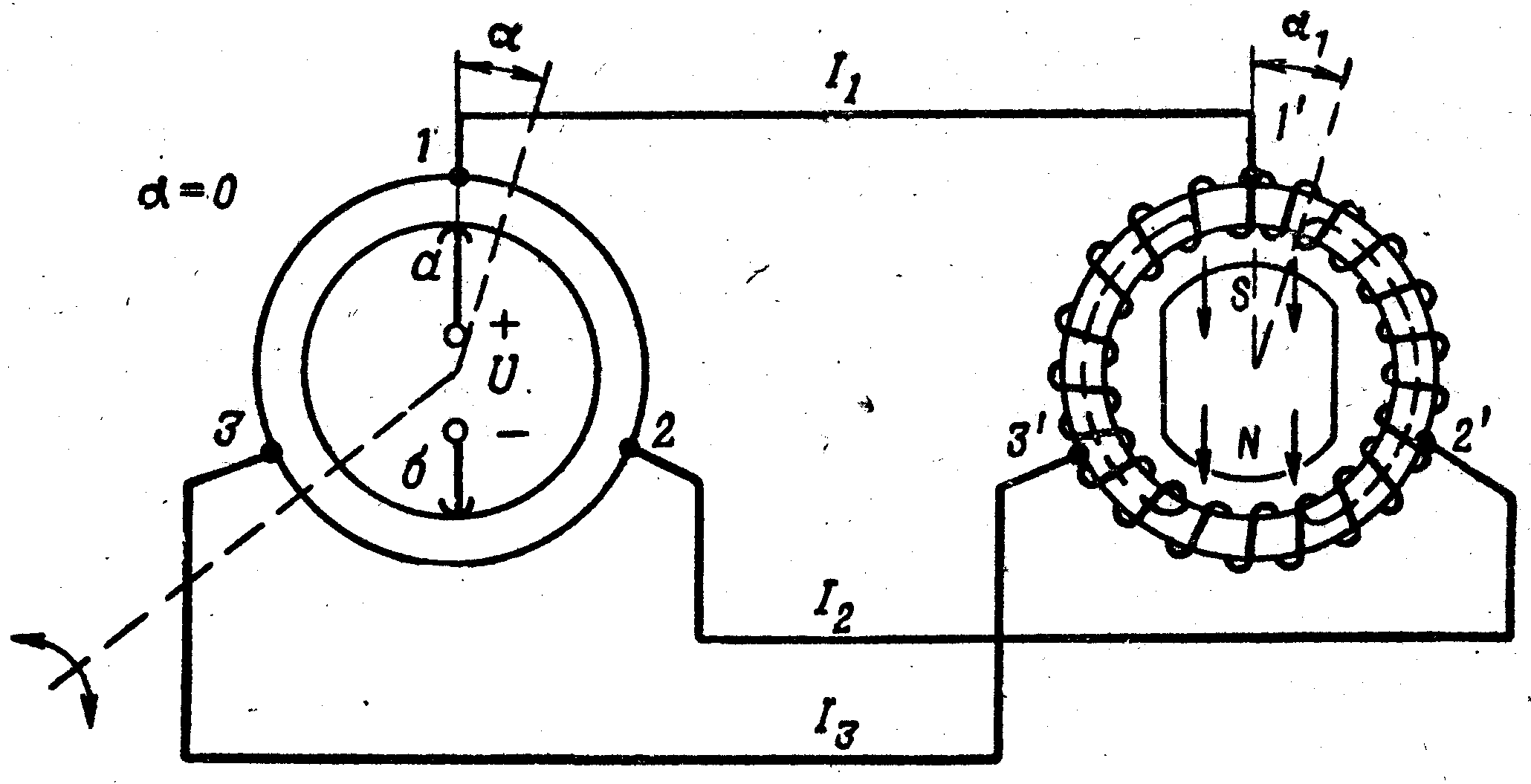
Ротор указателя представляет собой постоянный магнит, который может свободно перемещаться вокруг оси (рис. 2.5). На оси магнита закреплена стрелка. Указатель имеет круговую шкалу. Рассмотрим работу круговой дистанционной передачи в целом. Принципиальная электрическая схема передачи показана на рис. 2.6. Как уже отмечалось, такие схемы используются для передачи на расстояние угловых положений тех или иных элементов в приборной автоматике, например передачи на индикатор, расположенный в кабине самолета угловых положений магнитной стрелки, расположенной вне кабины.
При повороте такого элемента на некоторый угол α на такой же угол поворачивается связанная с ним ось датчика передачи - кругового потенциометра. При этом на угол αповорачиваются подвижные щетки а и б потенциометра. Последнее приводит к изменению выходных напряжений U 12, U 23, U 31потенциометра в соответствии с графиками на рис. 2.4. Напряжения U 12, U 23, U 31 обусловливают протекание соответствующих токов I 1, I 2, I 3 в линии передачи и катушках статора указателя.
|
| Рис. 2.6. Принципиальная схема круговой индикаторной передачи |
Из рис. 2.4 видно, что характер изменения напряжений U 12, U 23, U 31 при изменении угла поворота оси датчика аналогичен характеру изменения напряжений в трехфазной системе переменного <тока. Очевидно, что токи I 1, I 2, I 3 в катушках указателя, обусловленные этими напряжениями U 12, U 23, U 31, будут изменяться по такому же закону.
Другими словами, токи в катушках указателя изменяются так же, как в трехфазной обмотке, например в обмотке статора трехфазного двигателя переменного тока.
В таких системах, как уже упоминалось, создается вращающееся магнитное поле. Следовательно, обмотки статора указателя дистанционной передачи при протекании по ним токов I 1, I 2, I 3, обусловленных выходными напряжениями U 12, U 23, U 31 датчика, также создают вращающееся магнитное поле.
Это поле взаимодействует с полем постоянного магнита ротора, что приводит к появлению вращающего (синхронизирующего) момента М с, под действием которого ротор указателя со стрелкой начнет вращаться в ту же сторону, что и поле. Таким образом, вращающееся поле статора как бы увлекает за собой постоянный магнит (ротор со стрелкой). При этом синхронизирующий момент М свсегда стремится повернуть ротор (постоянный магнит) на такой угол, при котором продольная ось постоянного магнита (или, иначе, его полюса) точно совпадала бы с осью вращающегося поля (полюсами вращающегося поля).
При таком согласованном положении ротора с полем синхронизирующий момент М с равен нулю. Всякое отставание ротора от поля статора (рассогласование) приводит к увеличению синхронизирующего момента M с, благодаря чему ротор догоняет поле.
Полный оборот (360°) вращающегося поля совершается, как известно, за один полный цикл изменения питающих напряжений, в нашем случае напряжений U 12, U 23, U 31. Из рис. 2.4 видно, что такой полный цикл изменения напряжений U 12, U 23, U 31 совершается за один полный оборот оси датчика (щеток а и б). Поэтому каждому полному обороту оси датчика соответствует один оборот магнитного поля и соответственно один полный оборот ротора указателя со стрелкой.
Если бы ось ротора датчика вращалась непрерывно с некоторой скоростью, то также непрерывно с такой же скоростью вращался бы ротор указателя передачи со стрелкой. Если вращение оси ротора датчика прекращается при некотором значении угла α = α 1, то в этот же момент прекращается изменение напряжений U 12, U 23, U 31(они принимают достоянные значения, соответствующие α 1), прекращается вращение магнитного поля и соответственно прекращается вращение ротора указателя со стрелкой. Следовательно, ротор остановятся при значении угла α = α 1. Таким образом, каждому углу поворота α оси датчика соответствует такой же угол поворота α ротора указателя со стрелкой.
Последнее обусловлено тем, что постоянный - магнит (ротор указателя), как отмечалось выше, стремясь за счет М сустановиться по направлению вращающегося магнитного поля, будет поворачиваться каждый раз на такой же угол, как и это поле. В свою очередь ось магнитного поля статора поворачивается так же, как ось датчика (щетки а, б).
Таким образом, ось постоянного магнита индикатора каждый раз поворачивается на такой же угол, как и ось (подвижные щетки а и б) датчика.
Такое положение в дистанционной передаче, при котором ось датчика и ось приемника повернуты на один и тот же угол, называется согласованным положением. Если ось приемника оказалась повернута на угол α' 1не равный углу α 1 поворота оси датчика, то в системе появляется рассогласование  , что приводит к появлению синхронизирующего момента М спод действием которого ротор поворачивается так, чтобы исчезло рассогласование Θ.
, что приводит к появлению синхронизирующего момента М спод действием которого ротор поворачивается так, чтобы исчезло рассогласование Θ.
Для углов рассогласования  величина момента M спримерно пропорциональна Θ:
величина момента M спримерно пропорциональна Θ:
 ,
,
где k – коэффициент усиления (чувствительность) передачи.
Работу дистанционной передачи можно пояснить и с помощью графического построения оси результирующего поля статора указателя для различных значений угла α. На рис. 2.6 показано положение элементов передачи при угле α = 0. При этом по участкам (катушкам) обмотки указателя, заключенным между точками 1'-2' и 3'-1' протекают токи, соответствующие напряжениям U 12 и U 31. По участку обмотки, заключенному между точками 2'-3', ток не протекает, так как напряжение U 23, прикладываемое к этому участку обмотки (при α = 0), равно нулю.
Применив правило правой руки для определения направления потоков, созданных при этом в статоре, видим, что в верхней части статора образует северный полюс результирующего поля, в нижней - южный.
В направлении оси этого поля установится и ротор указателя со стрелкой.
Следует иметь в виду, что реальная дистанционная передача работает обычно с некоторой погрешностью, т. е. при повороте оси датчика на угол α ось ротора приемника поворачивается в общем случае на угол α',не равный углу α.
Последнее обусловлено наличием трения в опорах оси ротора приемника, трения ротора о воздух, а при наличии нагрузки - влиянием момента нагрузки на приемник и другими факторами.
Величина погрешности системы в передаче угловых перемещений оценивается углом рассогласования Θ.
Под углом рассогласования дистанционной передачи понимают разность углов поворота оси датчика а (командной оси) и оси ротора приемника α' (исполнительной оси):
Основными характеристиками любой индикаторной дистанционной передачи является величина угла рассогласования Θ и величина синхронизирующего момента М с.
Как отмечалось выше, синхронизирующий момент М спередачи - это вращающий момент, появляющийся при наличии рассогласования в системе ( ). Этот момент всегда направлен так, что стремится уничтожить рассогласование, т. е. стремится повернуть ротор приемника на такой же угол, на какой повернута ось датчика.
). Этот момент всегда направлен так, что стремится уничтожить рассогласование, т. е. стремится повернуть ротор приемника на такой же угол, на какой повернута ось датчика.
Чем больше синхронизирующий момент М спередачи, тем меньше (при прочих равных условиях) угол рассогласования Θ системы.
В авиационных индикаторных передачах угол рассогласования Θ обычно не превышает 1-2°, а в некоторых передачах составляет величину менее 1°.
В заключение необходимо отметить, что колебания напряжения питания, подводимого к подвижным щеткам датчика рассмотренной передачи, практически не сказываются на величине погрешности передачи. Последнее обусловлено тем, что указатель передачи представляет собой прибор логометрического типа, показания которого не зависят от изменения (в некоторых пределах) питающего напряжения.
При работе рассмотренной индикаторной передачи токи I 1, I 2, I 3 в линии связи, в катушках указателя и датчика протекают все время независимо от того, есть или нет в системе рассогласование.
|
|
|
|
|
Дата добавления: 2014-11-08; Просмотров: 2602; Нарушение авторских прав?; Мы поможем в написании вашей работы!