КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Спутниковые навигационные системы
|
|
|
|
С 1993 года функционирует американская навигационная система GPS NAVSTAR (Global Positioning System Navigation Satellite with Time And Ranging). Программа GPS NAVSTAR разработана и осуществлена фирмой Rockwell. Аналогичная российская навигационная система ГЛОНАСС развернута лишь частично.
Система GPS NAVSTAR состоит из следующих основных элементов:
· космического сегмента, включающего 24 искусственных спутника земли, на околоземных орбитах,
· наземного сегмента, образованного станциями слежения,
· аппаратуры потребителя: GPS-приемников.
Орбиты ИСЗ NAVSTAR расположены таким образом, что GPS-приемники позволяют определять собственное местоположение почти на всей территории Земли (~ до 80-х градусов широт). Круговые орбиты спутников имеют высоту 20000км и размещены равномерно в шести плоскостях, наклоненных на ~60о к экваториальной плоскости, что иллюстрирует рис.12.4. Временной интервал между спутниками составляет 1.5часа.

Рис.12.4. Орбитальная группировка ИСЗ навигационной системы.
Для передачи данных от ИСЗ используется шумоподобный сигнал малой мощности. В основу определения координат положен метод триангуляции. Используя специальный алгоритм, GPS-приемник выбирает несколько ИСЗ, пригодных для вычисления своего местоположения в двух- или трехмерной системе координат. Измеряя задержку сигналов, GPS-приемник вычисляет расстояния до каждого из ИСЗ и решает геометрическую задачу, определяя собственное положение как точку пересечения сфер с соответствующими радиусами. Для режима 2D-навигации достаточно устойчивого приема сигналов от трех ИСЗ, ошибка обычно не превышает 100 метров.
GPS-приемник реализован на основе специального микропроцессора и низкопрофильных пассивных ВЧ - антенн. Приемники потребляют ~1Вт. Типичный GPS-приемник осуществляет цикл определения координат раз в секунду, имеет интерфейс для связи с ЭВМ и другими внешними устройствами (как правило, RS232), и работает по стандартному протоколу (NMEA-0183). Кроме того, в состав приемника может входить ЖКМ для отображения получаемой информации. Структура GPS-приемника показана на рис.12.5.
|
|
|
Рис.12.5. Структура GPS-приемника.
Антенная система АС принимает сигналы видимой группировки ИСЗ. Обработку принятых сигналов с учетом их частотных и фазовых параметров осуществляет блок высокочастотного тракта ВЧТ. Математическую обработку навигационной информации проводит контроллер навигационного приемника КНП, используя залаженные алгоритмы решения навигационных задач АРНЗ. Результаты вычислений накапливаются в ОЗУ и могут передаваться в ЭВМ через интерфейс внешних устройств ИВУ.
Для исключения ионосферной ошибки применяется двухчастотный способ измерений: навигационная информация передается на частотах: 1575,42 МГц и 1227,6 МГц, которые модулируются одинаковыми двоичными кодами.
Навигационная информация, транслируемая ИСЗ, форматируется в виде кадров, объемом по 1500 бит и с периодом повторения равным 30сек. Кадр содержит: поправку временной шкалы данного ИСЗ и его эфемериды, 1/25 часть альманаха телеметрической информации, ключевые слова и поправку на распространение радиоволн. Погрешность предсказания эфемерид < 6м, погрешность сдвига временной шкалы < 8нс, что обеспечивает погрешность местоопределения < 10м. Однако, данная точность доступна только для приемников, имеющих возможность дешифрирования закрытой части кадра. Высокоточная информация защищается шифровальным ключом, имеющим недельный период. Открытая часть кадра позволяет определять координаты с точность 100м.
Навигационный приемник выполняет следующие функции:
|
|
|
· выбирает из совокупности видимых ИСЗ рабочее созвездие;
· проводит расчет для выбранной четверки ИСЗ ожидаемых значений угловых координат, дальности и радиальной скорости;
· идентифицирует сигналы ИСЗ по пространству, временной задержке, доплеровскому смещению частоты и по кодовому номеру ИСЗ;
· осуществляет слежение за навигационными сигналами,
· декодирует эфемероидную информацию;
· измеряет временные задержки сигналов и их доплеровские смещения;
· обрабатывает измерительную и эфемероидную информацию от всех ИСЗ и вычисляет координаты и составляющие скорости приемника;
· формирует полный телеметрический альманах ИСЗ по 25 кадрам;
· вычисляет оценку точности проведенного навигационного решения.
Наземный и космический сегменты навигационной системы решают следующие задачи:
· синхронизация генераторов точного времени всех ИСЗ с наземным эталоном;
· формирование навигационных кодов и модуляция ими радиосигналов;
· излучение навигационных сигналов ИСЗ в установленном порядке.
Для защиты навигационной информации используется псевдошумовой фазомодулированный сигнал, представляющий из себя код Голда. Каждый информационный бит кодируется 20 битами, сформированными на основе этих кодов. Правило кодирования имеет вид:
G(t)=G1(t) G2(t+mi T),
где i - номер ИСЗ, G1(x)=1+x3+x10, G2(x)=1+x2+x3+x6+x8+x9+x10.
Особый практический интерес представляет комплексное использование нескольких GPS-приемников, дающих информацию о своем местоположении (координаты в какой-либо геометрической проекции, скорость, курс и точное время). Такие комплексы составляют основу для построения диспетчерских систем на базе GPS, позволяющих контролировать из единого центра (диспетчерский пункт — ДП) перемещение подвижных объектов (ПО) в рамках определенной территории. Наиболее распространенная схема представляет собой систему локальной радиосвязи для передачи данных ПО — ДП и программное обеспечение ДП, предназначенное для оперативного отображения обстановки.
Полноценный навигационный комплекс (НК) строится на основе сети ЭВМ, объединяющей несколько диспетчерских пунктов, обслуживающих до двух тысяч ПО. В его задачи входит постоянное слежение за всеми контролируемыми ПО, регистрация информации движения, контроль (например, задача вхождения в заданный район, соблюдение расписания и т.п.).
|
|
|
Важнейшим элементом НК является база электронных карт и их форматов, распознаваемых системой. Карты могут поставляться с системой, быть жестко «зашиты» в ней или легко добавляться в систему ПО или ДП после приобретения у поставщика. Электронная карта — представление бумажной карты в виде цифрового массива внутри компьютера. Перевод бумажной карты в ее электронный вариант — очень трудоемкая и длительная операция, однако, однажды проведенная, она дает множество преимуществ. Электронные карты хранятся обычно в векторном виде, что дает возможность плавно изменять масштаб карты. Навигационные системы способны отображать на экране более одной карты, облегчая работу штурману или диспетчеру.
Важной частью любого НК является работа с различными устройствами с целью установления двусторонней связи между системой и подвижным объектом. Среди таких устройств может быть GPS-модем, различные РЛС, дифференциальные станции и т.п. Оперативное согласование, контроль параметров работы и управление осуществляется посредством группы ЭМВ, объединенных в специальную навигационную сеть. Такие навигационные системы находят широкое применение в управлении наземным, морским и воздушным транспортом.
МНОГОПРОЦЕССОРНЫЕ ВЫЧИСЛИТЕЛЬНЫЕ СИСТЕМЫ
Виды управления многопроцессорных вычислительных систем
(МПВС):
Ø Централизованное
Ø Децентрализованное
Ø Иерархическое
Ø Способы распараллеливания
Ø ОКМД – на уровне потоков данных
Ø МКОД – на уровне потоков команд
Ø МКМД – на уровне потоков команд и данных
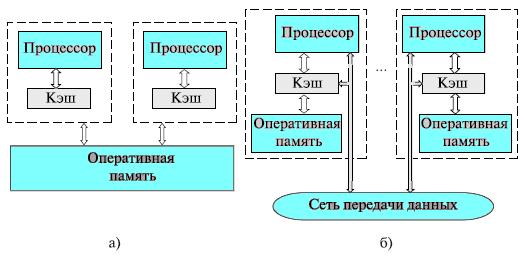
Архитектура многопроцессорных систем с общей и разделяемой памятью
Структура класса многопроцессорных вычислительных систем
Ø SISD (Single Instruction, Single Data) - системы, в которых существует одиночный поток команд и одиночный поток данных; к данному типу систем можно отнести обычные последовательные ЭВМ;
|
|
|
Ø SIMD (Single Instruction, Multiple Data) - системы c одиночным потоком команд и множественным потоком данных; подобный класс систем составляют МВС, в которых в каждый момент времени может выполняться одна и та же команда для обработки нескольких информационных элементов;
Ø MISD (Multiple Instruction, Single Data) - системы, в которых существует множественный поток команд и одиночный поток данных; примеров конкретных ЭВМ, соответствующих данному типу вычислительных систем, не существует; введение подобного класса предпринимается для полноты системы классификации;
Ø MIMD (Multiple Instruction, Multiple Data) - системы c множественным потоком команд и множественным потоком данных; к подобному классу систем относится большинство параллельных многопроцессорных вычислительных систем.
ЛИТЕРАТУРА
1. Новиков Ю.В., Калашников О.А., Гуляев С.Э. Разработка устройств сопряжения. М: "ЭКОМ", 1997-224с.
2. Новиков Ю.В., Карпенко Д.Г. Аппаратура локальных сетей. М: "ЭКОМ", 1998-288с.
3. Финогенов К.Г. Самоучитель по системным функциям MS DOS. М: "Радио и связь", 1995-382с.
4. Хоган Т. Аппратные и программные средства ПК. Справочник. М: "Радио и связь", 1995-384с.
5. Ламекин В.Ф. Видеотехника М: "Зевс", 1997-256с.
6. Авраменко Ю.Ф. Схемотехника проигрывателей компакт-дисков. С-П: "Наука и техника", 1999-128с.
7. Гудмэн Д. Секреты жесткого диска. Киев: "Диалектика", 1994-256с.
8. Корнеев В.В., Киселев А.В. Современные микропроцессоры. М: 1998-240с.
9. Гёль П. Как превратить персональный компьютер в измерительный комплекс. М: "ДМК", 1999-144с.
10.Никамин В.А. Форматы цифровой записи. С-П: "Элби", 1998-264с.
11. Фролов А.В., Фролов Г.В. Глобальные сети компьютеров. М: "ДИАЛОГ-МИФИ", 1996-288с.
12.Лагутенко О.И. Модемы. Справочник пользователя. С-П: "Лань", 1997-368с.
13. Уилтон Р. Видеосистемы персональных компьютеров. Руководство по программированию. М: "Радио и связь", 1994-384с.
14. Лебедев О.Н. Изделия электронной техники. Цифровые микросхемы. Микросхемы ЦАП и АЦП. Справочнок.. М: "Радио и связь", 1994-248с.
Перечень использованных электронных источников:
http:\\www.infocity.kiev.ua
http:\\www.vesa.org
http:\\www.twain.org
http:\\www.halyava.ru/document
http:\\www.fssr.ru
ВВЕДЕНИЕ. 3
1. ОБЩИЕ ПРИНЦИПЫ ПОСТРОЕНИЯ ЭВМ И ВЫЧИСЛИТЕЛЬНЫХ СИСТЕМ... 4
2. КЛАВИАТУРА И МАНИПУЛЯТОРЫ. 8
2.1. ВЗАИМОДЕЙСТВИЕ КЛАВИАТУРЫ С ЭВМ. 8
2.2. УСТРОЙСТВО И ПРОГРАММИРОВАНИЕ МАНИПУЛЯТОРА МЫШЬ". 9
3. ВИДЕОСИСТЕМЫ... 11
3.1. СТРУКТУРА ВИДЕОСИСТЕМ... 11
3.2. ПРОГРАММИРОВАНИЕ ВИДЕОСИСТЕМ С ПОМОЩЬЮ ПРОГРАММНЫХ ПРЕРЫВАНИЙ.. 13
3.3. ПРЯМОЕ ПРОГРАММИРОВАНИЕ ВИДЕОСИСТЕМ... 16
3.4. МОНИТОРЫ... 19
4. НАКОПИТЕЛИ ИНФОРМАЦИИ НА МАГНИТНЫХ ДИСКАХ.. 22
4.1. СТРУКТУРА НАКОПИТЕЛЕЙ ИНФОРМАЦИИ НА МАГНИТНЫХ ДИСКАХ.. 22
4.2. ФИЗИЧЕСКИЕ ПРИНЦИПЫ МАГНИТНОЙ ЗАПИСИ. МАГНИТНАЯ ГОЛОВКА.. 23
4.3. КОНСТРУКЦИЯ МАГНИТНЫХ ДИСКОВ.. 24
4.4. КОДИРОВАНИЕ И СЖАТИЕ ЗАПИСЫВАЕМОЙ ИНФОРМАЦИИ.. 25
4.5. ПРОГРАММИРОВАНИЕ РАБОТЫ ДИКОВЫХ НАКОПИТЕЛЕЙ.. 28
5. НАКОПИТЕЛИ ЦИФРОВОЙ ИНФОРМАЦИИ ТИПА CD-ROM... 30
5.1. ОБЩИЕ СВЕДЕНИЯ О НАКОПИТЕЛЯХ ЦИФРОВОЙ ИНФОРМАЦИИ ТИПА CD-ROM... 30
5.2. СТРУКТУРА КАНАЛОВ ЗАПИСИ И ЧТЕНИЯ В СИСТЕМЕ CD.. 31
5.3. КОНСТРУКЦИЯ ОПТИЧЕСКОГО БЛОКА.. 35
5.4. МНОГОФУНКЦИОНАЛЬНЫЕ ЦИФРОВЫЕ ОПТИЧЕСКИЕ.. 38
ДИСКИ - DVD.. 38
6. МОДЕМЫ... 41
6.1. НАЗНАЧЕНИЕ И УСТРОЙСТВО МОДЕМОВ.. 41
6.2. ПРОГРАММИРОВАНИЕ МОДЕМОВ.. 43
7. СЕТЕВЫЕ УСТРОЙСТВА.. 48
7.1. ОСНОВНЫЕ ЭЛЕМЕНТЫ СЕТЕЙ ЭВМ... 48
7.2. СЕТЕВЫЕ АДАПТЕРЫ... 49
7.3. СЕТЕВОЕ ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ.. 51
8. ЗВУКОВЫЕ ПЛАТЫ... 54
8.1. СТРУКТУРА ЗУКОВЫХ ПЛАТ.. 54
8.2. ПРОГРАММИРОВАНИЕ ЗВУКОВЫХ ПЛАТ.. 55
9. УСТРОЙСТВА ВВОДА ИЗОБРАЖЕНИЙ В ЭМВ.. 58
9.1. СКАНЕРЫ... 58
9.2. ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ СКАНЕРОВ.. 60
9.3. ФОТОКАМЕРЫ И ВИДЕОКАМЕРЫ... 61
10. ПРИНТЕРЫ... 67
10.1. УСТРОЙСТВО И ПРИНЦИПЫ РАБОТЫ ПРИНТЕРОВ.. 67
10.2. ПРОГРАММИРОВАНИЕ ПРИНТЕРОВ.. 69
11. МНОГОФУНКЦИОНАЛЬНЫЕ ИЗМЕРИТЕЛЬНЫЕ ПЛАТЫ... 70
11.1. ХАРАКТЕРИСТИКИ И СТРУКТУРА ИЗМЕРИТЕЛЬНЫХ ПЛАТ.. 70
11.2. АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ.. 73
11.3. ЦИФРО-АНАЛОГОВЫЕ ПРЕОБРАЗОВАТЕЛИ.. 77
12. ЦИФРОВЫЕ СИСТЕМЫ СВЯЗИ И НАВИГАЦИИ.. 78
12.1. СИСТЕМЫ ЦИФРОВОЙ ПОДВИЖНОЙ СВЯЗИ.. 78
12.2. СПУТНИКОВЫЕ СИСТЕМЫ СВЯЗИ.. 82
12.3. СПУТНИКОВЫЕ НАВИГАЦИОННЫЕ СИСТЕМЫ... 83
ЛИТЕРАТУРА.. 88
Виктор Иванович Капля,
Егор Викторович Капля
ЭВМ и вычислительные системы
Учебное пособие
|
|
|
|
|
Дата добавления: 2014-11-18; Просмотров: 501; Нарушение авторских прав?; Мы поможем в написании вашей работы!