КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Порядок виконання роботи. 1. Виписати вихідні дані (табл
|
|
|
|
1. Виписати вихідні дані (табл. 2.1) згідно заданого варіанту.
3. Побудувати у вибраному масштабі (наприклад 1:10) проекції схеми трикорпусного плуга в повздовжньо - вертикальній і горизонтальній площинах (рис. 2.1). Побудову схеми плуга краще розпочати з лінії, яка визначає положення рами плуга. При розміщенні на схемі корпусів плуга слід строго дотримуватись основних розмірів: висоти рами, висоти і довжини корпуса, відстані між корпусани. Форму польового і борозенного обрізу корпуса, а також ширину польової дошки можна нанести орівнтовно.
3. Аналітично визначити:
- тяговий опір одного корпуса:
Rx = Кab, (2.1)
де К - питомий опір грунту, кПа;
а - глибина обробітку грунту, м;
b - ширина захвату корпуса плуга, м (для всіх варіантів b = 0,4 м).
- вертикальну складову тягового опору корпуса:
Rz = Rxtgφ (2.2)
- модуль сили Rxz за формулою:
 (2.3)
(2.3)
та рівнодіючу реакцій грунту на робочі поверхні корпусів.
 , (2.4)
, (2.4)
де n- кількість корпусів (для всіх варіантів n = 3).
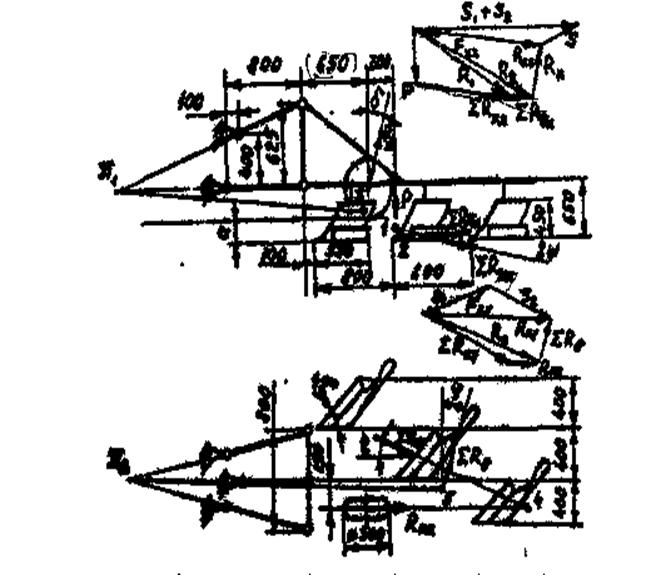
Рис.2.1. Схема для визначення умов рівноваги начіпного плуга.
Вважати, що ця рівнодіюча прикладена до середнього корпуса плуга на відстані 0,5а від борозни під заданим кутом ψ.
- силу тертя польових дощок по стінках борозни
 ,
,
де φ -кут тертя грунту по сталі, град;
Ry - бокова сила на польових дошках

Вважати, що рівнодіюча сил тертя ΣRδх прикладена до середини польової дошки середнього корпусу.
- реакцію грунту на робочі поверхні корпусів в горизонтальній площині
та суму реакцій стінок борозен на польової дошки
4. Нанести вектори сил ΣRxz і ΣRбх на проекцію схеми плуга в повздовжньо - вертикальній площині, а також вектор сили тяжіння Р (для всіх варіантів Р = 9 кН). Через вісь колеса під кутом δ спрямувати вектор реакції грунту на опорне колесо (модуль реакції невідомий і підлягає визначенню графічним методом). Кут δ5 визначити по коефіцієнту перекочування М з співвідношення М = tgδ. Наближено М можно прийняти рівним 0,1 для щільних грунтів і 0,2 для пухких, що відповідає 9° і 12° кута δ.
|
|
|
5.Окремо від схеми плуга побудувати багатокутник сил. Для цього у вибраному масштабі провести вектор сили Р, з його кінця - вектор сили Σ Rхz. З'єднавши початок вектора Р з кінцем вектора Σ Rхz, визначити рівнодіючу цих сил R1.
На схемі плуга через точку 1 перетину ліній дії сил Р і Σ Rхz провести пряму, паралельну силі R1, до перетину її з напрямом сили ΣRбх в точці 2.
На багатокутнику сил з кінця вектора R1| відкласти вектор сили ΣRбх. Їх додавання дає рівнодіючу R2.
На схемі плуга через точку 2 провести лінію, паралельну силі R2, до перетину її з лінією дії сили Rk в точці 3. Точка 3 - це точка, де прикладена рівнодіюча Rхz всіх сил опору плуга: Р, Σ Rхz, ΣRбх i Rk. Вона зрівноважується силою тяги Fхz, яка проходить через точку 3 і миттєвий центр обертання плуга π1. З'єднавши точки 3 і π1 прямою, визначити лінію дії сил Rxz і Fхz.
Значення сил RХZ і FХZ визначити з багатокутника сил. Для цього з кінця вектора R 2 провести пряму, паралельну лінії π1 - 3. Точка їх перетину дасть відрізки, які в прийнятому масштабі визначать сили Rk і Fхz(Rхz).
При необхідності можна знайти зусилля в ланках начіпного механізму трактора (S, S1+S2), розклавши силу FХZ в напрямі верхньої і нижніх тяг.
6. Нанести вектори сил ΣRxy, Rkx і ΣRб на проекцію схеми плуга в горизонтальній площині Силу ΣRxy прикласти до середнього корпусу на відстані 0,5b від носка i п'ятки леміша під кутом η до напрямку руху. Сила Rkx являє собою проекцію сили Rk на горизонтальну площину (Rkx=КkSinδ), а сила ΣRб - суму реакцій стінок борозен на польові дошки і прикладена на кінці польової дошки середнього корпуса під кутом тертя φ до нормалі.
|
|
|
7. Побудувати багатокутник сил, які діють в горизонтальній площині. Побудову багатокутника сил розпочати додаванням сил ΣRxy і Rkx. На схемі плуга з точки 4 перетину векторів сил ΣRху і Rкх провести пряму, паралельну їх рівнодіючій R3 до перетину з лінією дії сили ΣR6 в точці 5. Точку 5 з’єднати з π2 і тим самим визначити напрям дії сили тяги Fхy. В багатокутнику сил через початок і кінець сили R3 провести лінії, паралельні напрямкам π2 - 5 і ΣR6 на схемі плуга. Точка їх перетину визначить значення сил ΣR6 і Fху (Rxy).
Щоб визначити зусилля S, S1 і S2 в ланках начіпного механізму, треба силу Fху розкласти за напрямками вздовж нижніх тяг.
Проекції сил FХZ і FXY на вісь χ повинні бути однаковими. В протилежному випадку слід зробити коректування за рахунок сили ΣR6x, яка була визначена орієнтовно.
|
|
|
|
|
Дата добавления: 2014-11-20; Просмотров: 430; Нарушение авторских прав?; Мы поможем в написании вашей работы!