КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Вывод информации в устройствах управления. Автоматическое управление приводами. Обработка сигналов с датчиков на технологическом оборудовании
|
|
|
|
ЛЕКЦИЯ 14
Рассмотрим задачу вывода алфавитно-цифровой информации на жидкокристаллический алфавитно-цифровой индикатор (ЖКИ) модели DM2021 фирмы Sanyo. Данная модель ЖКИ имеет тюле вывода информации размером две строки по двадцать символов в каждой. ЖКИ содержит видеопамять, в которой хранятся отображаемые символы, а также обладаем собственной системой управления жидкокристаллической панелью. Наличие указанных узлов существенно упрощает работу с ЖКИ, т. к. собственно управление отображением точек — элементов изображения — производится автоматически в соответствии с поданной на ЖКИ командой.
ЖКИ содержит восьмиразрядную шину команд-данных и шину управления, в состав которой входят одноразрядные линии разрешения программирования (Е), выбора типа посылки "команда-данные" (RS) и выбора направления передачи данных "чтение-запись" (RW). Подключение ЖКИ к МК 80С515 показано на рис.. Порт Р4 предназначен для организации шины команд- данных, а старшие три бита порта Р1 предназначены для организации шины управления. Переменный резистор необходим для регулировки контрастности изображения
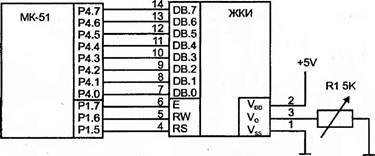
Рис. Сопряжение ЖКИ с МК-51
Процедура записи в ЖКИ выполняется в три этапа: на шине DB устанавливается информация, отражающая подаваемые в ЖКИ команды-данные, затем устанавливаются необходимые значения на линиях RW и RS и, наконец, на входе Е формируется переход от высокого логического уровня к низкому. Для возврата системы упоавления ЖКИ в исходное состояние следует перевести вход Е в состояние логической единицы.
Не приводя всей системы команд ЖКИ, остановимся на следующих из них: 38h — установка восьмибитного режима обмена с ЖКИ, использование для вывода обеих строк с размером символа 5x7 точек; DСЕ — активизация всех знакомест ЖКИ в режиме погашенного курсора; 80h — установка адреса, начиная с которого записываемые в ЖКИ данные будут последовательно располагаться в видеопамяти.
|
|
|
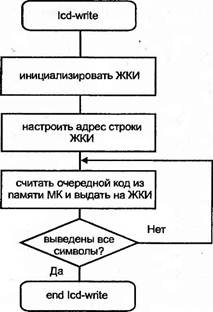
Рис.. Схема программы вывода информации на ЖКИ
Схема и текст программы, осуществляющей вывод на ЖКИ сорока символов, коды которых расположены во внешней памяти данных микроконтроллера, начиная с адреса OFFDOh, приведены соотвстственно на рис. и в листинге
Вывод ШИМ-сигналов
В ряде задач управления возникает необходимость выдачи на объект управляющих сигналов определенной интенсивности (либо заданной мощности за некоторый период). Как пранило, для объектов с аналоговым управлением применяется формирование управляющих сигналов с изменяемой амплитудой.
Один из вариантов реализации такого управления заключаемся в использовании широтно-импульсной модуляции (ШИМ). В данном варианте на одном из разрядов выходного порта микроконтроллера формируются периодические импульсные сигналы с постоянной частотой следования и изменяемым отношением времени длительности импульса ко времени длительности паузы, которое определяет интенсивность управляющего сигнала.
Рассмотрим реализацию ШИМ на примере управления частотой вращения двигателя постоянного тока. Схема устройства сопряжения МК 80С515 с двигателем показана на рис.. Схема программы формирования ШИМ- сигналов приведена на рис., а ее текст— в листинге.
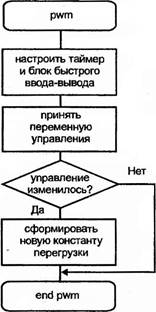
Рис.. Схема программы ШИМ-управления
Выход сигналов с временным сдвигом
В заключение рассмотрим задачу формирования временного интервала с управляемой длительностью, начало которого определяется внешним старт сигналом (задача синхронизации).
Для возможности гибкого использования программного комплекса, реализующего данный вариант управления, целесообразно организовать его с использованием возможностей, предоставляемых системой прерываний При возникновении запускающего события обработчик прерывания INTO запускает таймер 0. отсчитывающий заданный основной программой временной интервал, по истечении которого обработчик прерывания таймера 0 на определенном разряде выходною порта формирует высокий логический уровень I после этого обработчик переключает таймер с такими настройками, чтобы
|
|
|
выдержать фиксированный интервал длительности импульса. Выполняя вторично, обработчик прерывания таймера на заданной выходной линии формирует низкий логический уровень.
Схема управляющей программы приведена на рис., а текст программы в листинге
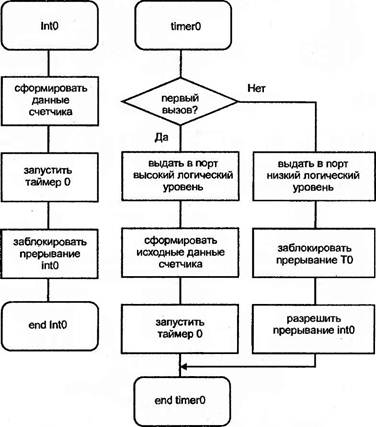
Рис.. Схема программы выдержки временного интервала
Программный комплекс формирует импульс длительностью 240 мкс, выдаваемый спустя 2... 10 мс относительно начала запускающего перепада на входе INTO в зависимости от величины кода установки.
|
|
|
|
|
Дата добавления: 2014-12-10; Просмотров: 822; Нарушение авторских прав?; Мы поможем в написании вашей работы!