КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Трансформаторные (взаимно индуктивные) преобразователи
|
|
|
|
| |
| Рис. 5.48. Дифференциальный трансформаторный преобразователь |
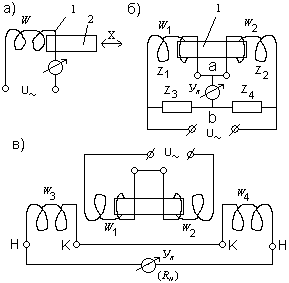
Принцип действия. На рис. 5.48 приведена схема дифференциального трансформаторного преобразователя перемещений. В этом случае на каркас катушки w 1 концентрично с ней наматывается обмотка w 3. Соответственно на каркас катушки w 2 наматывается обмотка w 4. При этом w 1= w 2 и w 3= w 4.
При симметричном положении сердечника коэффициенты взаимной индуктивности M1, обмоток w 1 и w 3, и M2, обмоток w 2 и w 4, равны. Тогда ЭДС, наводимые в обмотках w 3 и w 4 будут равны, и, поскольку катушки w 1 и w 2 включены в измерительную схему встречно, ток указателя  будет равен нулю. При смещении сердечника под действием измеряемого перемещения х равенство коэффициентов взаимной индуктивности двух пар катушек нарушается; ЭДС, наводимые в обмотках w 3 и w 4, будут иметь разную величину, и по указателю, имеющему внутреннее сопротивление R Н, потечет ток I УК, величина которого будет практически линейно связана с измеряемым перемещением х.
будет равен нулю. При смещении сердечника под действием измеряемого перемещения х равенство коэффициентов взаимной индуктивности двух пар катушек нарушается; ЭДС, наводимые в обмотках w 3 и w 4, будут иметь разную величину, и по указателю, имеющему внутреннее сопротивление R Н, потечет ток I УК, величина которого будет практически линейно связана с измеряемым перемещением х.
Различают два вида трансформаторных преобразователей: с изменяющимся магнитным сопротивлением и с постоянным магнитным сопротивлением и подвижной обмоткой.
Преобразователи первого вида конструктивно аналогичны индуктивным преобразователям и отличаются тем, что вместо одной имеют две обмотки. Так, например, преобразователь (рис. 5.48) состоит из подвижного якоря 1, П-образного магнитопровода 2и двух обмоток w 1 и w 2. При изменении воздушного зазора δ изменяются магнитное сопротивление R м и взаимная индуктивность M.
К преобразователям с постоянным магнитным сопротивлением и подвижной обмоткой относятся ферродинамические трансформаторные преобразователи и вращающиеся трансформаторы.
|
|
|
|
| Рис. 5.49. Ферродинамический преобразователь угла поворота |
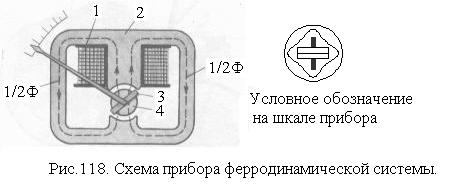
Схема ферродинамического преобразователя угла поворота приведена на рис. 5.49. Он состоит из П-образного магнитопровода 2 с полюсными наконечниками. На магнитопроводе помещена обмотка возбуждения w 1 1. Вторичная подвижная обмотка w 2 помещена между полюсными наконечниками. Внутри обмотки w 2 3 для уменьшения магнитного сопротивления вставляется цилиндрический ферромагнитный сердечник 4. Воздушный зазор между сердечником и полюсными наконечниками одинаков, также одинакова в воздушном зазоре и магнитная индукция.
Обмотка w 1 включается в цепь переменного напряжения, имеющего частоту w, и создает магнитный поток. Часть его проходит через обмотку и наводит в ней ЭДС Е 2. При повороте обмотки наведенная ЭДС изменяется.
Согласно закону Кирхгофа напряжение U 1, приложенное к первичной обмотке w 1, равно
U 1= E 1+ I 1 R 1= j w w 1Ф1+ I 1 R 1,
где Е 1 – ЭДС самоиндукции; Ф1 – магнитный поток, создаваемый обмоткой w 1; R 1 – ее активное сопротивление.
Если это сопротивление пренебрежимо мало и напряжение уравновешивается ЭДС Е 1, то
Ф1= U 1/ j w w 1.
Часть этого потока проходит через вторичную обмотку
Ф2=2aФ1/p,
где a – угол поворота рамки (рис. 5.49) и наводит в ней ЭДС:
E 2= j w w 2Ф2=(2aФ1/p)(w 2/ w 1) U 1.
Отсюда видно, что ЭДС вторичной обмотки пропорциональна углу a.
Схемы включения трансформаторных преобразователей. Вторичное напряжение трансформаторного преобразователя может быть измерено любым вольтметром переменного тока с соответствующим пределом измерения (рис. 5.48). Эта схема отличается простотой, но применяется редко, поскольку напряжение U 2 и, следовательно, показанияприбора зависят от первичного напряжения U 1. Кроме того, напряжение U 2зависит от выходного сопротивления преобразователя Z вых. Входное напряжение:
U 2= Е 2 –I 2 Z вых,
где Е 2 – выходная ЭДС преобразователя; I 2 – ток, потребляемый вольтметром.
|
|
|
Следует отметить, что чувствительность измерительных схем зависит от соотношения сопротивлений R Н и z 1= z 2= z 0, где R Н – внутреннее сопротивление измерительного прибора (указателя).
Условие согласования сопротивления указателя R Н с выходным сопротивлением моста, при котором обеспечивается максимальная чувствительность, для мостовой схемы (рис.5.43,б), определяется соотношением
 ,
,
где  – частота питающего напряжения; L 0 – индуктивность каждой из катушек с числом витков w 1 и w 2 при симметричном положении сердечника катушек; z 0 – полное сопротивление катушек w 1 и w 2.
– частота питающего напряжения; L 0 – индуктивность каждой из катушек с числом витков w 1 и w 2 при симметричном положении сердечника катушек; z 0 – полное сопротивление катушек w 1 и w 2.
При заданных значениях R н (известен тип применяемого измерительного прибора) и L 0 режим оптимальной чувствительности можно получить путем подбора частоты питающего напряжения .
В Государственной системе приборов (ГСП) нормируется изменение коэффициента взаимоиндуктивности трансформаторных преобразователей. При изменении измеряемой величины в номинальном диапазоне он должен изменяться в пределах 0 – 10, 0 – 20 или 10 – 0 – 10мГн. Последние значения получаются при изменении фазы напряжения, что происходит, например, при изменении воздушного зазора от δ1=δ 0+Dδном до δ2=δ 0–Dδном.
Погрешность трансформаторных преобразователей. Причины погрешностей трансформаторных преобразователей с изменяющимся магнитным сопротивлением аналогичны причинам погрешностей индуктивных преобразователей. Аналогичны также методы их уменьшения. Аддитивные погрешности значительно уменьшаются при использовании дифференциальных преобразователей.
С изменением температуры, частоты питающего напряжения и по другим причинам выходное сопротивление может изменяться. Это приводит к погрешности. Погрешность может возникнуть также и вследствие изменения параметров линии связи между преобразователем и вольтметром. Очевидно, что погрешность уменьшается с уменьшением тока, потребляемого вольтметром.
Вследствие трения показание прибора может установиться, когда вращающий момент сравняется с моментом трения. При этом по рамке будет течь некоторый остаточный ток и показания прибора будут содержать погрешность. Поскольку остаточный ток I 2зависит от сопротивлений выходной цепи преобразователя, то показания прибора в некоторой степени также зависят от этого сопротивления, однако эта зависимость меньше, чем для индуктивных преобразователей.
|
|
|
Все трансформаторные преобразователи имеют также специфические причины погрешности, обусловленные протеканием тока во вторичных обмотках и изменением их сопротивления. Это мультипликативные погрешности, уменьшающиеся с уменьшением тока, потребляемого вторичным преобразователем. Погрешность отсутствует при измерении ЭДС первичного преобразователя компенсационным методом с помощью автоматического компенсатора.
Изменение температуры преобразователя вызывает изменение ЭДС Е 2. При увеличении температуры возрастает активное сопротивление первичных обмоток и полное их сопротивление. Это уменьшает первичный ток I 1 и ЭДС Е 2.
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 1868; Нарушение авторских прав?; Мы поможем в написании вашей работы!