КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Побудова графіка контролю буксування . 2 страница
|
|
|
|
4) Рв4 = Кв · Fв · V4 2 = 0,25 · 2,457 ·28,67 2 = 504,9 Н,
5) Рв5 = Кв · Fв · V5 2 = 0,25 · 2,457 ·35,84 2 = 789,0 Н.
І передача РК, ІІІ передача КП:
1) Рв1 = Кв · Fв · V1 2 = 0,25 · 2,457 ·10,18 2 = 63,6 Н,
2) Рв2 = Кв · Fв · V2 2 = 0,25 · 2,457 ·20,36 2 = 254,6 Н,
3) Рв3 = Кв · Fв · V3 2 = 0,25 · 2,457 ·30,54 2 = 572,9 Н,
4) Рв4 = Кв · Fв · V4 2 = 0,25 · 2,457 ·40,72 2 = 1018,5 Н,
5) Рв5 = Кв · Fв · V5 2 = 0,25 · 2,457 ·50,89 2 = 1590,8 Н.
ІІ передача РК, І передача КП:
1) Рв1 = Кв · Fв · V1 2 = 0,25 · 2,457 · 2,06 2 = 2,6 Н,
2) Рв2 = Кв · Fв · V2 2 = 0,25 · 2,457 · 4,11 2 = 10,4 Н,
3) Рв3 = Кв · Fв · V3 2 = 0,25 · 2,457 · 6,17 2 = 23,4 Н,
4) Рв4 = Кв · Fв · V4 2 = 0,25 · 2,457 · 8,23 2 = 41,6 Н,
5) Рв5 = Кв · Fв · V5 2 = 0,25 · 2,457 ·10,28 2 = 64,9 Н.
ІІ передача РК, ІІ передача КП:
1) Рв1 = Кв · Fв · V1 2 = 0,25 · 2,457 · 2,93 2 = 5,3 Н,
2) Рв2 = Кв · Fв · V2 2 = 0,25 · 2,457 · 5,85 2 = 21,0 Н,
3) Рв3 = Кв · Fв · V3 2 = 0,25 · 2,457 · 8,78 2 = 47,3 Н,
4) Рв4 = Кв · Fв · V4 2 = 0,25 · 2,457 ·11,7 2 = 84,1 Н,
5) Рв5 = Кв · Fв · V5 2 = 0,25 · 2,457 ·14,63 2 = 131,5 Н.
ІІ передача РК, ІІІ передача КП:
1) Рв1 = Кв · Fв · V1 2 = 0,25 · 2,457 · 4,15 2 = 10,6 Н,
2) Рв2 = Кв · Fв · V2 2 = 0,25 · 2,457 · 8,31 2 = 42,4 Н,
3) Рв3 = Кв · Fв · V3 2 = 0,25 · 2,457 ·12,46 2 = 95,4 Н,
4) Рв4 = Кв · Fв · V4 2 = 0,25 · 2,457 ·16,62 2 = 169,7 Н,
5) Рв5 = Кв · Fв · V5 2 = 0,25 · 2,457 · 20,77 2 = 265,0 Н.
2.6. Визначення вільної сили тяги, для відповідних значень швидкості руху при кожній передачі КП.
Вільну силу тяги визначаємо по формулі:
І передача РК, І передача КП:
1) Рсв1 = Рт1 – Рв1 = 9613,2 – 15,6 = 9597,6 Н,
2) Рсв2 = Рт2 – Рв2 = 10276,2 – 62,4 =10213,8 Н,
3) Рсв3 = Рт3 – Рв3 = 10276,2 –140,4 =10135,8 Н,
4) Рсв4 = Рт4 – Рв4 = 9613,2 – 249,6 = 9363,6 Н,
5) Рсв5 = Рт5 – Рв5 = 8287,2 – 390,1 = 7897,1 Н.
-38-
І передача РК, ІІ передача КП:
1) Рсв1 = Рт1 – Рв1 = 6757,8 – 31,6 = 6726,2 Н,
2) Рсв2 = Рт2 – Рв2 = 7223,8 –126,3 = 7097,5 Н,
3) Рсв3 = Рт3 – Рв3 = 7223,8 –283,9 = 6939,9 Н,
4) Рсв4 = Рт4 – Рв4 = 6757,8 –504,9 = 6252,9 Н,
5) Рсв5 = Рт5 – Рв5 = 5825,7 –789,0 = 5036,7 Н.
І передача РК, ІІІ передача КП:
1) Рсв1 = Рт1 – Рв1 = 4759,0 – 63,6 = 4695,4 Н,
2) Рсв2 = Рт2 – Рв2 = 5087,2 – 254,6 = 4832,6 Н,
3) Рсв3 = Рт3 – Рв3 = 5087,2 – 572,9 = 4514,3 Н,
4) Рсв4 = Рт4 – Рв4 = 4759,0 – 1018,5 = 3740,5 Н,
5) Рсв5 = Рт5 – Рв5 = 4019,5 – 1590,8 = 2428,7 Н.
ІІ передача РК, І передача КП:
1) Рсв1 = Рт1 – Рв1 = 23552,3 – 2,6 = 23549,7 Н,
2) Рсв2 = Рт2 – Рв2 = 25176,6 –10,4 = 25166,2 Н,
3) Рсв3 = Рт3 – Рв3 = 25176,6– 23,4 = 25153,2 Н,
4) Рсв4 = Рт4 – Рв4 = 23552,3 – 41,6= 23510,7 Н,
5) Рсв5 = Рт5 – Рв5 = 20303,7 – 64,9 = 20238,8 Н.
ІІ передача РК, ІІ передача КП:
1) Рсв1 = Рт1 – Рв1 = 16556,6 – 5,3 = 16551,3 Н,
2) Рсв2 = Рт2 – Рв2 = 17698,4 – 21,0 = 17677,4 Н,
3) Рсв3 = Рт3 – Рв3 = 17698,4 – 47,3 = 17651,1 Н,
4) Рсв4 = Рт4 – Рв4 = 16556,6 – 84,1 = 16472,5 Н,
5) Рсв5 = Рт5 – Рв5 = 14273,9 –131,5= 14141,4 Н.
ІІ передача РК, ІІІ передача КП:
1) Рсв1 = Рт1 – Рв1 = 11659,6 – 10,6 = 11649,0 Н,
2) Рсв2 = Рт2 – Рв2 = 12463,7 – 42,4 = 12421,3 Н,
3) Рсв3 = Рт3 – Рв3 = 12463,7 – 95,4 = 12368,3 Н,
4) Рсв4 = Рт4 – Рв4 = 11659,6 – 169,7 = 11489,9 Н,
5) Рсв5 = Рт5 – Рв5 = 10051,3 – 265,0 = 9786,3 Н.
2.7. Визначення динамічного фактора повністю навантаженого автомобіля, для відповідних значень швидкості руху при кожній
передачі КП.
Динамічний фактор повністю навантаженого автомобіля визначаємо по формулі:
І передача РК, І передача КП:
1) Dа1 =  =
=  = 0,257,
= 0,257,
2) Dа2 =  =
=  = 0,274,
= 0,274,
-39-
3) Dа3 =  =
=  = 0,272,
= 0,272,
4) Dа4 =  =
=  = 0,251,
= 0,251,
5) Dа5 =  =
=  = 0,212.
= 0,212.
І передача РК, ІІ передача КП:
1) Dа1 = =  =0,180,
=0,180,
2) Dа2 = =  =0,190,
=0,190,
3) Dа3 = =  =0,186,
=0,186,
4) Dа4 = =  =0,168,
=0,168,
5) Dа5 = =  =0,135.
=0,135.
І передача РК, ІІІ передача КП:
1) Dа1 = =  =0,126,
=0,126,
2) Dа2 = =  =0,130,
=0,130,
3) Dа3 = =  =0,121,
=0,121,
4) Dа4 = =  =0,100,
=0,100,
5) Dа5 = =  =0,065.
=0,065.
ІІ передача РК, І передача КП:
1) Dа1 = =  =0,632,
=0,632,
2) Dа2 = =  =0,675,
=0,675,
3) Dа3 = =  =0,675,
=0,675,
4) Dа4 = =  =0,631,
=0,631,
5) Dа5 = =  =0,543.
=0,543.
-40-
ІІ передача РК, ІІ передача КП:
1) Dа1 = =  =0,444,
=0,444,
2) Dа2 = =  =0,474,
=0,474,
3) Dа3 = =  =0,473,
=0,473,
4) Dа4 = =  =0,442,
=0,442,
5) Dа5 = =  =0,379.
=0,379.
ІІ передача РК, ІІІ передача КП:
1) Dа1 = =  =0,3125,
=0,3125,
2) Dа2 = =  =0,333,
=0,333,
3) Dа3 = =  =0,332,
=0,332,
4) Dа4 = =  =0,308,
=0,308,
5) Dа5 = =  =0,2625.
=0,2625.
2.8. Побудова графіка
Результати розрахунків V, Рт, Рв, Рсв, Dа [ див. п.2.2, 2.3, 2.5, 2.6, 2.7 ] зводимо в таблицю 2.
Таблиця 2 – Результати розрахунків динамічної характеристики автомобіля
| Передача в РК | Передача в КП | № п.п. | V, м/с | Рт, Н | Рв, Н | Рсв, Н | Dа |
| І | І | 5,04 | 9613,2 | 15,6 | 9597,6 | 0,257 | |
| 10,08 | 10276,2 | 62,4 | 10213,8 | 0,274 | |||
| 15,12 | 10276,2 | 140,4 | 10135,8 | 0,272 | |||
| 20,16 | 9613,2 | 249,6 | 9363,6 | 0,251 | |||
| 25,20 | 8287,2 | 390,1 | 7897,1 | 0,212 | |||
| І | ІІ | 7,17 | 6757,8 | 31,6 | 6726,2 | 0,180 | |
| 14,34 | 7223,8 | 126,3 | 7097,5 | 0,190 | |||
| 21,5 | 7223,8 | 283,9 | 6939,9 | 0,186 | |||
| 28,67 | 6757,8 | 504,9 | 6252,9 | 0,168 | |||
| 35,84 | 5825,7 | 789,0 | 5036,7 | 0,135 |
-41-
Продовження табл. 2
| Передача в РК | Передача в КП | № п.п. | V, м/с | Рт, Н | Рв, Н | Рсв, Н | Dа |
| І | ІІІ | 10,18 | 4759,0 | 63,6 | 4695,4 | 0,126 | |
| 20,36 | 5087,2 | 254,6 | 4832,6 | 0,130 | |||
| 30,54 | 5087,2 | 572,9 | 4514,3 | 0,121 | |||
| 40,72 | 4759,0 | 1018,5 | 3740,5 | 0,100 | |||
| 50,89 | 4019,5 | 1590,8 | 2428,7 | 0,065 | |||
| ІІ | І | 2,06 | 23552,3 | 2,6 | 23549,7 | 0,632 | |
| 4,11 | 25176,6 | 10,4 | 25166,2 | 0,675 | |||
| 6,17 | 25176,6 | 23,4 | 25153,2 | 0,675 | |||
| 8,23 | 23552,3 | 41,6 | 23510,7 | 0,631 | |||
| 10,28 | 20303,7 | 64,9 | 20238,8 | 0,543 | |||
| ІІ | ІІ | 2,93 | 16556,6 | 5,3 | 16551,3 | 0,444 | |
| 5,85 | 17698,4 | 21,0 | 17677,4 | 0,474 | |||
| 8,78 | 17698,4 | 47,3 | 17651,1 | 0,473 | |||
| 11,70 | 16556,6 | 84,1 | 16472,5 | 0,442 | |||
| 14,63 | 14273,9 | 131,5 | 14141,4 | 0,379 | |||
| ІІ | ІІІ | 4,15 | 11659,6 | 10,6 | 11649,0 | 0,3125 | |
| 8,31 | 12463,7 | 42,4 | 12421,3 | 0,333 | |||
| 12,46 | 12463,7 | 95,4 | 12368,3 | 0,332 | |||
| 16,62 | 11659,6 | 169,7 | 11489,9 | 0,308 | |||
| 20,77 | 10051,3 | 265,0 | 9786,3 | 0,2625 |
Маштабний коефіцієнт швидкості руху автомобіля визначаємо по формулі:
МV =  =
=  = 2,16...2,75
= 2,16...2,75  .
.
Приймаємо: МV = 2,5
Маштабний коефіцієнт динамічного фактору повністю навантаженого автомобіля визначаємо по формулі:
МDа =  =
=  = 222,2...251,8
= 222,2...251,8 
Приймаємо:МDа =250
Маючи значення маштабних коефіцієнтів, за даними табл.2, будуємо динамічну характеристику автомобіля, яка складається з декількох кривих Dа = f (V), кількість яких залежить від кількості передач КП та РК.
3. ПОБУДОВА НОМОГРАМИ НАВАНТАЖЕНЬ.
Маштабний коефіцієнт динамічного фактору ненавантаженого автомобіля визначаємо по формулі:
МDо = МDа •  = 250 •
= 250 •  =219,4
=219,4
-42-
4. ПОБУДОВА ГРАФІКА КОНТРОЛЮ БУКСУВАННЯ.
4.1. Визначення динамічного фактору по зчепленню для автомобіля в спорядженому стані (ненавантаженого автомобіля).
Динамічний фактор по зчепленню для автомобіля в спорядженому стані (ненавантаженого автомобіля) визначається по формулі:
1) Dо.зч1=  •φx1 =
•φx1 =  •0,1= 0,0525,
•0,1= 0,0525,
2) Dо.зч2= •φx2 = •0,2=0,1050,
3) Dо.зч3= •φx3 = •0,3=0,1574,
4) Dо.зч4= •φx4 = •0,4=0,2099,
5) Dо.зч5= •φx5 = •0,5 =0,2624,
6) Dо.зч6= •φx6 = •0,6=0,3148,
7) Dо.зч7= •φx7 = •0,7=0,3673,
8) Dо.зч8= •φx8 = •0,8=0,4198.
4.2. Визначення динамічного фактору по зчепленню для повністю навантаженого автомобіля.
Динамічний фактор по зчепленню для повністю навантаженого автомобіля визначається по формулі:
1) Dа.зч1=  •φx1 =
•φx1 =  •0,1=0,0542,
•0,1=0,0542,
2) Dа.зч2= •φx2 = •0,2=0,1084,
3) Dа.зч3= •φx3 = •0,3=0,1626,
4) Dа.зч4= •φx4 = •0,4=0,2168,
5) Dа.зч5= •φx5 = •0,5 =0,2711,
6) Dа.зч6= •φx6 = •0,6=0,3253,
-43-
7) Dа.зч7= •φx7 = •0,7=0,3795,
8) Dа.зч8= •φx8 = •0,8=0,4337.
4.3. Побудова графіка
Результати розрахунків Dо.зч і та Dа.зч і [ див. п.4.1, 4.2 ] зводимо в таблицю 3.
Таблиця 3 – Результати розрахунків графіка контролю буксування
| № п.п. | φx | Dо.зч | Dа.зч |
| 0,1 | 0,0525 | 0,0542 | |
| 0,2 | 0,1050 | 0,1084 | |
| 0,3 | 0,1574 | 0,1626 | |
| 0,4 | 0,2099 | 0,2168 | |
| 0,5 | 0,2624 | 0,2711 | |
| 0,6 | 0,3148 | 0,3253 | |
| 0,7 | 0,3673 | 0,3795 | |
| 0,8 | 0,4198 | 0,4337 |
-44-
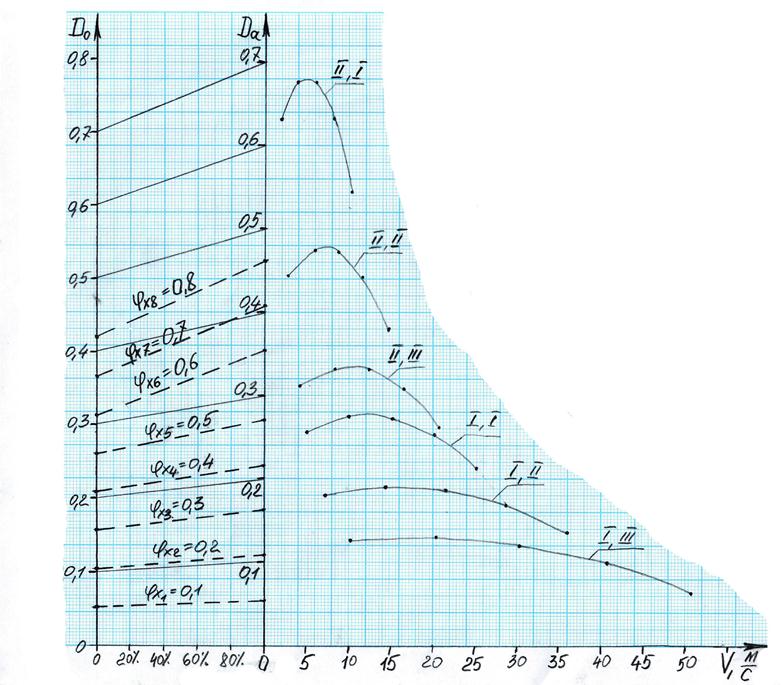
Рис.2 Динамічна характеристика автомобіля
-45-
Література:
1. В.А. Иларионов “Теория и конструкція автомобиля”
2. НИИАТ “Краткий автомобильный справочник”
-46-
-47-
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 247; Нарушение авторских прав?; Мы поможем в написании вашей работы!